递归神经网络(RNN)简介
在此之前,我们已经学习了前馈网络的两种结构——多层感知器和卷积神经网络,这两种结构有一个特点,就是假设输入是一个独立的没有上下文联系的单位,比如输入是一张图片,网络识别是狗还是猫。但是对于一些有明显的上下文特征的序列化输入,比如预测视频中下一帧的播放内容,那么很明显这样的输出必须依赖以前的输入, 也就是说网络必须拥有一定的”记忆能力”。为了赋予网络这样的记忆力,一种特殊结构的神经网络——递归神经网
在此之前,我们已经学习了前馈网络的两种结构——多层感知器和卷积神经网络,这两种结构有一个特点,就是假设输入是一个独立的没有上下文联系的单位,比如输入是一张图片,网络识别是狗还是猫。但是对于一些有明显的上下文特征的序列化输入,比如预测视频中下一帧的播放内容,那么很明显这样的输出必须依赖以前的输入, 也就是说网络必须拥有一定的”记忆能力”。为了赋予网络这样的记忆力,一种特殊结构的神经网络——递归神经网络(Recurrent Neural Network)便应运而生了。网上对于RNN的介绍多不胜数,这篇《Recurrent Neural Networks Tutorial》对于RNN的介绍非常直观,里面手把手地带领读者利用python实现一个RNN语言模型,强烈推荐。为了不重复作者 Denny Britz的劳动,本篇将简要介绍RNN,并强调RNN训练的过程与多层感知器的训练差异不大(至少比CNN简单),希望能给读者一定的信心——只要你理解了多层感知器,理解RNN便不是事儿:-)。
RNN的基本结构
首先有请读者看看我们的递归神经网络的容貌: 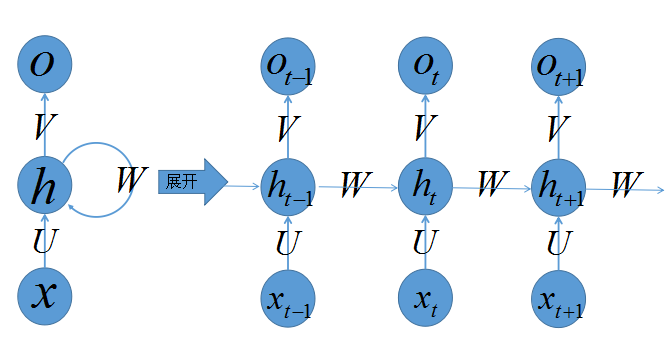
乍一看,好复杂的大家伙,没事,老样子,看我如何慢慢将其拆解,正所谓见招拆招,我们来各个击破。
上图左侧是递归神经网络的原始结构,如果先抛弃中间那个令人生畏的闭环,那其实就是简单”输入层=>隐藏层=>输出层”的三层结构,我们在多层感知器的介绍中已经非常熟悉,然而多了一个非常陌生的闭环,也就是说输入到隐藏层之后,隐藏层还会给自己也来一发,环环相扣,晕乱复杂。
我们知道,一旦有了环,就会陷入“先有蛋还是先有鸡”的逻辑困境,为了跳出困境我们必须人为定义一个起始点,按照一定的时间序列规定好计算顺序,做到有条不紊,于是实际上我们会将这样带环的结构展开成一个序列网络,也就是上图右侧被“unfold”之后的结构。先别急着能理解RNN,我们来点轻松的,先介绍这样的序列化网络结构包含的参数记号:
- 网络某一时刻的输入 xt <script type="math/tex" id="MathJax-Element-1">x_t</script>,和之前介绍的多层感知器的输入一样, xt <script type="math/tex" id="MathJax-Element-2">x_t</script>是一个 n <script type="math/tex" id="MathJax-Element-3">n</script>维向量,不同的是递归网络的输入将是一整个序列,也就是
x=[x1,...,xt−1,xt,xt+1,...xT] <script type="math/tex" id="MathJax-Element-4">x=[x_1,...,x_{t-1},x_{t},x_{t+1},...x_T]</script>,对于语言模型,每一个 xt <script type="math/tex" id="MathJax-Element-5">x_t</script>将代表一个词向量,一整个序列就代表一句话。 - ht <script type="math/tex" id="MathJax-Element-6">h_t</script>代表时刻 t <script type="math/tex" id="MathJax-Element-7">t</script>的隐藏状态
ot <script type="math/tex" id="MathJax-Element-8">o_t</script>代表时刻 t <script type="math/tex" id="MathJax-Element-9">t</script>的输出- 输入层到隐藏层直接的权重由
U <script type="math/tex" id="MathJax-Element-10">U</script>表示,它将我们的原始输入进行抽象作为隐藏层的输入 - 隐藏层到隐藏层的权重 W <script type="math/tex" id="MathJax-Element-11">W</script>,它是网络的记忆控制者,负责调度记忆。
- 隐藏层到输出层的权重
V <script type="math/tex" id="MathJax-Element-12">V</script>,从隐藏层学习到的表示将通过它再一次抽象,并作为最终输出。
RNN的Forward阶段
上一小节我们简单了解了网络的结构,并介绍了其中一些记号,是时候介绍它具体的运作过程了。首先在 t=0 <script type="math/tex" id="MathJax-Element-13">t=0</script>的时刻, U,V,W <script type="math/tex" id="MathJax-Element-14">U,V,W</script>都被随机初始化好, h0 <script type="math/tex" id="MathJax-Element-15">h_0</script>通常初始化为0,然后进行如下计算:
值得注意的是,我们说递归神经网络拥有记忆能力,而这种能力就是通过 W <script type="math/tex" id="MathJax-Element-24">W</script>将以往的输入状态进行总结,而作为下次输入的辅助。可以这样理解隐藏状态:
RNN的Backward阶段
上一小节我们说到了RNN如何做序列化预测,也就是如何一步步预测出 o1,o2,....ot−1,ot,ot+1..... <script type="math/tex" id="MathJax-Element-3470">o_1,o_2,....o_{t-1},o_t,o_{t+1}.....</script>,接下来我们来了解网络的知识 U,V,W <script type="math/tex" id="MathJax-Element-3471">U,V,W</script>是如何炼成的。
其实没有多大新意,我们还是利用在之前讲解多层感知器和卷积神经网络用到的backpropagation方法。也就是将输出层的误差 Cost <script type="math/tex" id="MathJax-Element-3472">Cost</script>,求解各个权重的梯度 ∇U,∇V,∇W <script type="math/tex" id="MathJax-Element-3473">\nabla U,\nabla V ,\nabla W</script>,然后利用梯度下降法更新各个权重。现在问题就是如何求解各个权重的梯度,其它的所有东西都在之前介绍中谈到了,所有的trick都可以复用。
由于是序列化预测,那么对于每一时刻 t <script type="math/tex" id="MathJax-Element-3474">t</script>,网络的输出
回忆之前我们介绍 多层感知器的backprop算法,我们知道算法的trick是定义一个 δ=∂e∂s <script type="math/tex" id="MathJax-Element-3484">\delta=\frac{\partial e}{\partial s}</script>,首先计算出输出层的 δL <script type="math/tex" id="MathJax-Element-3485">\delta^L</script>,再向后传播到各层 δL−1,δL−2,.... <script type="math/tex" id="MathJax-Element-3486">\delta^{L-1},\delta^{L-2},....</script>,那么如何计算 δ <script type="math/tex" id="MathJax-Element-3487">\delta</script>呢?先看下图:
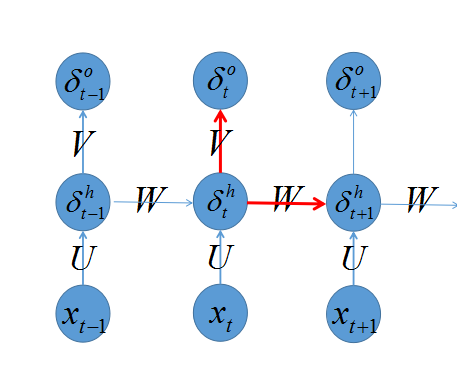
之前我们推导过,只要关注当前层次发射出去的链接即可,也就是
只要计算出所有的 δot,δht <script type="math/tex" id="MathJax-Element-3489">\delta^o_t,\delta^h_t</script>,就可以通过以下计算出 ∇W,∇U <script type="math/tex" id="MathJax-Element-3490">\nabla W,\nabla U</script>:
其中 × <script type="math/tex" id="MathJax-Element-3492">\times</script>表示两个向量的外积。这样看来,只要你熟悉MLP的backprop算法,RNN写起程序来和MLP根本没有多大差异!手写naive的demo至少比CNN容易很多。
RNN的训练困难
虽然上一节中,我们强调了RNN的训练程序和MLP没太大差异,虽然写程序容易,但是训练起来却是千难万阻。为什么呢?因为我们的网络是根据输入而展开的,输入越长,展开的网络越深,那么对于“深度”网络训练有什么困难呢?最常见的是“gradient explode”和“gradient vanish”。这种问题在RNN中如何体现呢?为了强调这个问题,我们模仿Yoshua Bengio的论文《On the difficulty of training recurrent neural networks》的推导,重写一下RNN的梯度求解过程,为了推导方便,我们人为地为 W,U <script type="math/tex" id="MathJax-Element-49">W,U</script>打上标签 Wt,Ut <script type="math/tex" id="MathJax-Element-50">W^t,U^t</script>,即认为当确定好时间长度 T <script type="math/tex" id="MathJax-Element-51">T</script>,RNN就变成普通的MLP。打上标签后的RNN变成如下: 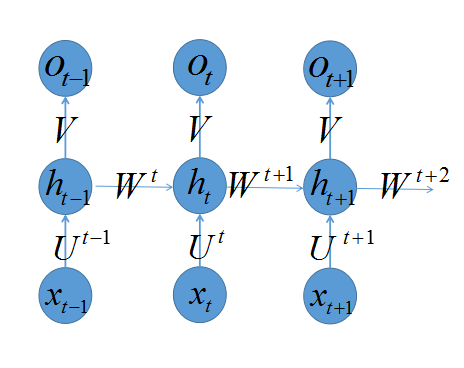
假如对于时刻
反复运用链式法则,我们可以求出每一个 ∇W1,∇W2,....,∇Wt,∇Wt+1 <script type="math/tex" id="MathJax-Element-59">\nabla W^1,\nabla W^2,....,\nabla W^{t},\nabla W^{t+1}</script>,需要注意的是,实际RNN模型对于 W,U <script type="math/tex" id="MathJax-Element-60">W,U</script>都是不打标签的,也就是在不同时刻都是共享同样的参数,这样可以大大减少训练参数,和CNN的共享权重类似。对于共享参数的RNN,我们只需将上述的一系列式子抹去标签并求和,就可以得到Yoshua Bengio论文中所推导的梯度计算式子:
为了克服”gradient vanish”的问题,LSTM和GRU模型便后续被推出了,为什么LSTM和GRU可以克服gradient vanish问题呢?由于它们都有特殊的方式存储”记忆”,那么以前gradient比较大的”记忆”不会像简单的RNN一样马上被抹除,因此可以一定程度上克服gradient vanish问题。
另一个简单的技巧可以用来克服gradient explode的问题就是gradient clipping,也就是当你计算的gradient超过阈值 c <script type="math/tex" id="MathJax-Element-69">c</script>的或者小于阈值
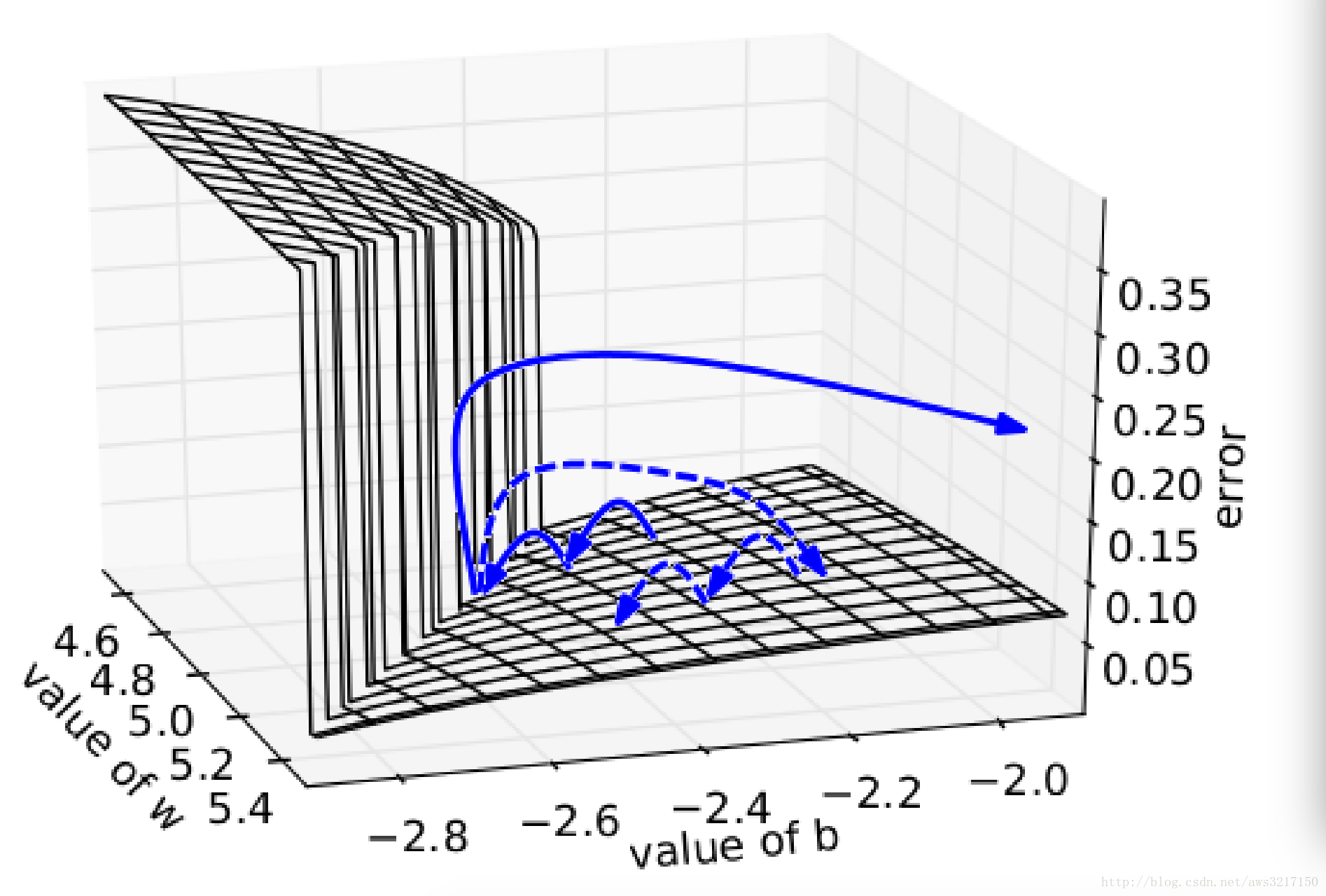
上图所示是RNN的Error Sufface,可以看到RNN的Error Sufface要么非常陡峭,要么非常平坦,如果不采取任何措施,当你的参数在某一次更新之后,刚好碰到陡峭的地方,此时gradient变得非常大,那么你的参数更新也会非常大,很容易导致震荡问题。而如果你采取了gradient clipping这个技巧,那么即使你不幸碰到陡峭的地方,gradient也不会explode,因为被你限制在某个阈值 c <script type="math/tex" id="MathJax-Element-73"></script>。
有趣的是,正是因为训练深度网络的困难,才导致神经网络这种古老模型沉寂了几十年,不过现在硬件的发展,训练数据的增多,神经网络重新得以复苏,并以重新以深度学习的外号杀出江湖。
参考引用
《Recurrent Neural Networks Tutorial》
《On the difficulty of training recurrent neural networks》

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 30
30 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)