【STM32 CubeMX + Keil】光照强度传感器 BH1750 、GY302
·
本文聚焦快速应用,复制代码后两分钟即可上手。如需了解底层原理,请另行查阅相关资料。
目录

1、BH1750 特点与参数
淘宝常见两种 BH1750 模块(长款与短款),本文使用的是短款模块。
- 光照度范围: 0-65535 Lux
- 内置 ADC,直接输出数字量,无需复杂计算
- 支持 I²C 通信,ADDR 引脚可设置两个从机地址
- 测量误差±20%,受红外线影响小
- 小体积,低成本
2、接线说明
| 模块引脚 | STM32引脚 | 说明 |
|---|---|---|
| VCC | 3.3V(优先) 或者 5V | 部分模块无 LDO,建议先试 3.3V |
| GND | GND | |
| SCL | PC0 | 使用模拟 I²C,引脚可自定义 |
| SDA | PC1 | 使用模拟 I²C,引脚可自定义 |
| ADDR | 悬空不接 | 默认低电平,从机地址为 0x46 |
3、代码移植
工程添加 bsp_BH1750.c、bsp_BH1750.h 两个文件即可(代码附文末)。已封装底层 I²C 操作,直接调用其函数即可。
- 上述两文件,下载后,复制到工程物理文件夹;
- 添加C文件到工程:左侧工程管理器双击添加c文件
- 添加H文件路径:点击Option按钮,添加h文件的存放路径;
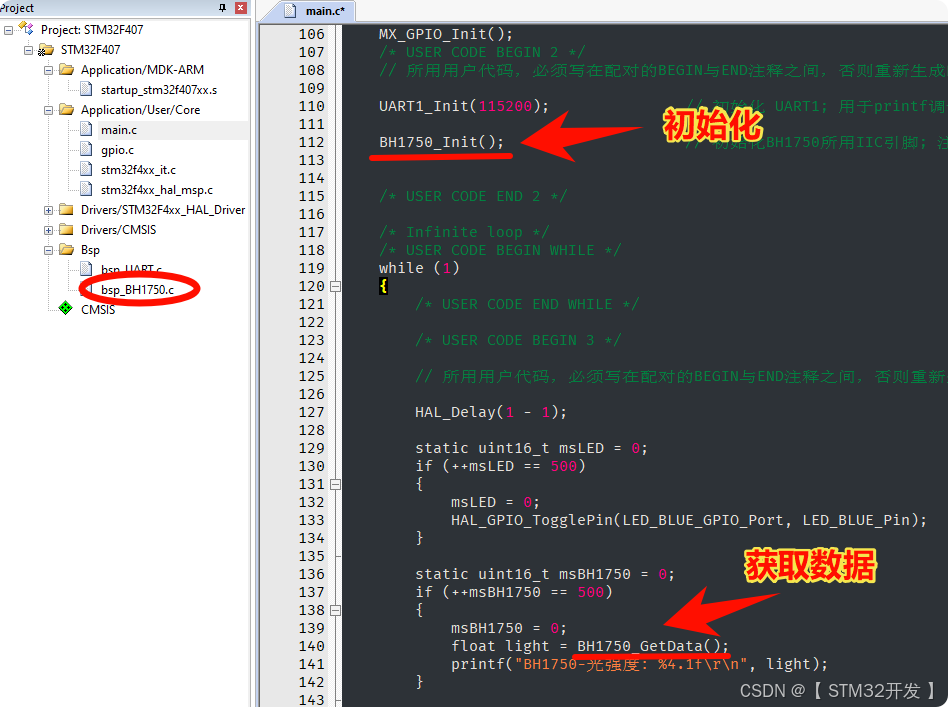
4、函数使用
- 只需如下2个函数,即可完成初始化、读取数据
- 初始化:BH1750_Init(); // 初始化引脚工作模式
- 获取数据:BH1750_GetData(); // 返回值是float类型
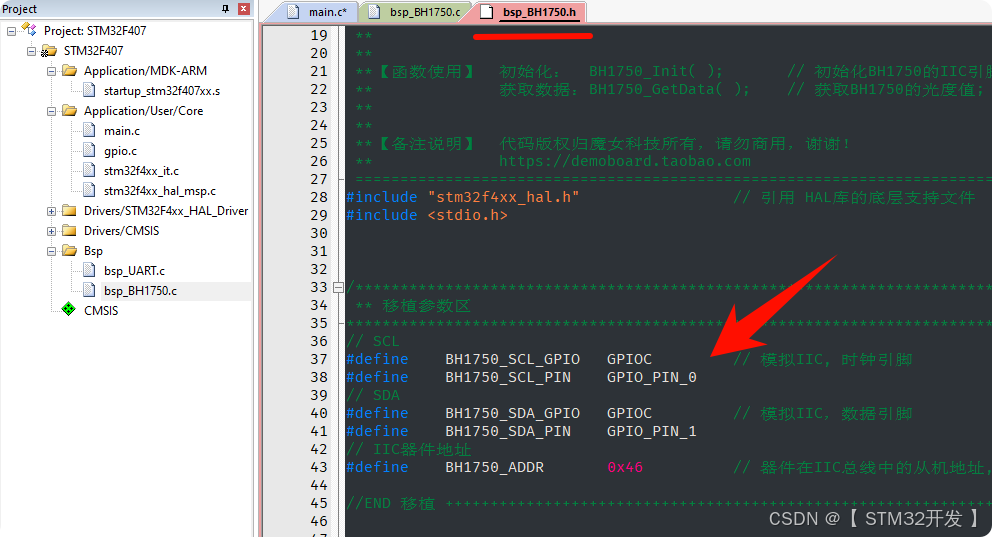
5、修改引脚配置
- 示例代码里,使用的是模拟IIC, SCL-PC0, SDA-PC1
- 如果想修改为其它引脚,可在头文件 bsp_BH1750.h中修改
如何打开头文件 ?
- 在 c 文件里,右击,弹出菜单,选择:Toggle Header/Code File。
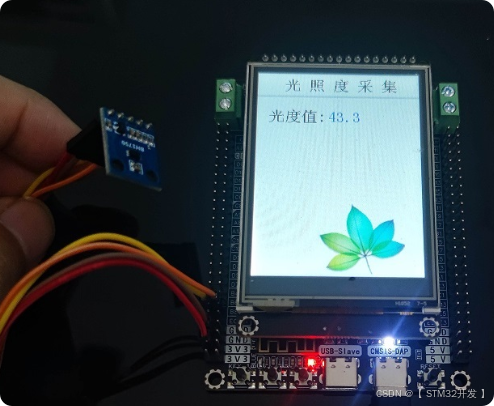
6、实验效果
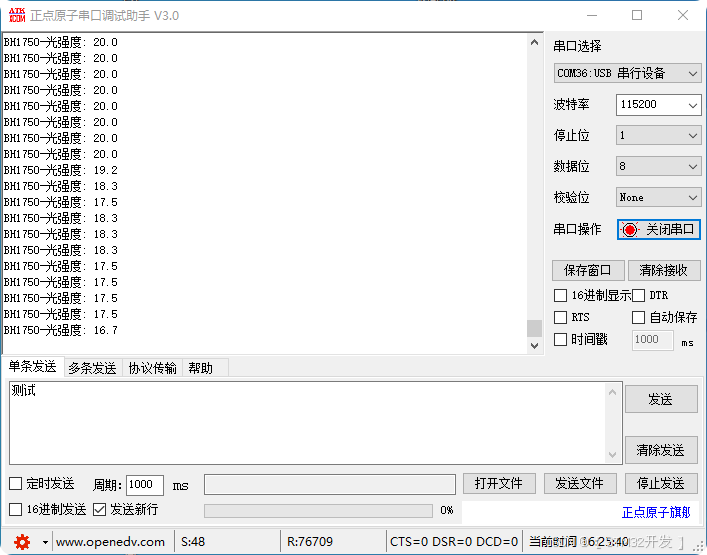
数据输出到显示屏,下图是2.8寸屏,效果:
7、详细代码
bsp_BH1750.h 代码
#ifndef __BSP_BH1750_H_
#define __BSP_BH1750_H_
/**==================================================================================================================
**【文件名称】 bsp_BH1750.h
**【功能测试】 BH1750-光强度传感器数据采集
**==================================================================================================================
**【实验平台】 STM32F407 + KEIL5.31 + BH1750
**
**【实验操作】 1-模块接线,VCC 接 3.3V
** GND 接 GND
** SCL 接 PC0; 没要求,在h文件里修改
** SDA 接 PC1; 没要求,在h文件里修改
** ADDR 接 空置或GND; 用于决定器件的地址,接GND或空置时地址为0x46,接3.3V时地址为0xB8
**
**【文件移植】 步骤1-复制文件:可复制bsp_BH1750.c和bsp_BH1750.h两个文件,或复制BH1750文件夹,保存到所需工程目录文件夹下;
** 步骤2-添加文件:在keil工各程左侧文件管理器中,双击某文件夹,以添加bsp_BH1750.c文件;
** 步骤3-添加路径:点击魔术棒工具按钮,在“c/c++"选项页中,点击”Include Path"后面的按键,以添加文件存放所在路径(是文件夹,不是文件);
** 步骤4-添加引脚:在需要BH1750输出的代码文件头部,添加:#include "bsp_BH1750.h";
**
**
**【函数使用】 初始化: BH1750_Init( ); // 初始化BH1750的IIC引脚; 注意:本代码采用软件IIC,引脚在bsp_BH1750.h中修改
** 获取数据:BH1750_GetData( ); // 获取BH1750的光度值; 注意: 返回float类型数据
**
**
**【备注说明】 代码版权归魔女科技所有,请勿商用,谢谢!
** https://demoboard.taobao.com
====================================================================================================================*/
#include "stm32f4xx_hal.h" // 引用 HAL库的底层支持文件
#include <stdio.h>
/*****************************************************************************
** 移植参数区
****************************************************************************/
// SCL
#define BH1750_SCL_GPIO GPIOC // 模拟IIC, 时钟引脚
#define BH1750_SCL_PIN GPIO_PIN_0
// SDA
#define BH1750_SDA_GPIO GPIOC // 模拟IIC,数据引脚
#define BH1750_SDA_PIN GPIO_PIN_1
// IIC器件地址
#define BH1750_ADDR 0x46 // 器件在IIC总线中的从机地址, 根据ADDR引脚不同修改:当ADDR引脚接GND或空置时地址为0x46,接3.3V时地址为0xB8; 最后写方向位0x46+0;读方向0x46+1;
//END 移植 ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
/*****************************************************************************
** 声明 全局函数
****************************************************************************/
void BH1750_Init(void); // 初始化BH1750:配置模拟IIC引脚、发送初始化指令
float BH1750_GetData(void); // 读取BH1750数据,返回光度值
#endif
bsp_BH1750.c 代码
/**==================================================================================================================
**【文件名称】 bsp_BH1750.c
**【功能测试】 BH1750-光强度传感器数据采集
**==================================================================================================================
**【实验平台】 STM32F407 + KEIL5.31 + BH1750
**
**【实验操作】 1-模块接线,VCC 接 3.3V
** GND 接 GND
** SCL 接 PC0; 没要求,在h文件里修改
** SDA 接 PC1; 没要求,在h文件里修改
** ADDR 接 空置或GND; 用于决定器件的地址,接GND或空置时地址为0x46,接3.3V时地址为0xB8
**
**【文件移植】 1-复制文件:可复制bsp_BH1750.c和bsp_BH1750.h两个文件,或复制BH1750文件夹,保存到所需工程目录文件夹下;
** 2-添加文件:在keil工各程左侧文件管理器中,双击某文件夹,以添加bsp_BH1750.c文件;
** 3-添加路径:点击魔术棒工具按钮,在“c/c++"选项页中,点击”Include Path"后面的按键,以添加文件存放所在路径(是文件夹,不是文件);
** 4-添加引用:在需要BH1750输出的代码文件头部,添加:#include "bsp_BH1750.h";
**
**
**【函数使用】 引脚修改:在bsp_BH1750.h文件里修改
** 初 始 化:BH1750_Init( ); // 初始化BH1750的IIC引脚; 注意:本代码采用软件IIC,引脚在bsp_BH1750.h中修改
** 获取数据:BH1750_GetData( ); // 获取BH1750的光度值; 注意: 返回float类型数据
**
**
**【备注说明】 代码版权归魔女科技所有,请勿商用,谢谢!
** https://demoboard.taobao.com
====================================================================================================================*/
#include "bsp_BH1750.h"
// IIC 操作函数
static void start(void); // IIC开始信号
static void stop(void); // IIC停止信号
static void sendByte(uint8_t txd); // IIC发送一个字节
static uint8_t readByte(uint8_t ack); // IIC读取一个字节
static uint8_t waitAck(void); // IIC等待ACK信号
static void Ack(void); // IIC发送ACK信号
static void NAck(void); // IIC不发送ACK信号
// 引脚电平控制 宏定义
#define SDA_1 (BH1750_SDA_GPIO -> BSRR = BH1750_SDA_PIN) // SDA 置高
#define SDA_0 (BH1750_SDA_GPIO -> BSRR = BH1750_SDA_PIN <<16) // SDA 置低
#define SCL_1 (BH1750_SCL_GPIO -> BSRR = BH1750_SCL_PIN) // SCL 置高
#define SCL_0 (BH1750_SCL_GPIO -> BSRR = BH1750_SCL_PIN <<16) // SCL 置低
// 引脚电平读取 宏定义
#define READ_SDA (BH1750_SDA_GPIO->IDR & BH1750_SDA_PIN) // 读SDA电平状态; 低电平时返回0,高电平返回非0值
// BH1750 指令 宏定义
#define BH1750_ON 0x01 // 启动
#define BH1750_CON 0x10 // 连续读取
#define BH1750_ONE 0x20 // 一次读取
#define BH1750_RSET 0x07 // 重置,重置数据寄存器值在POWERON模式下有效
/******************************************************************************
* 函 数: delay_ms
* 功 能: ms 延时函数
* 备 注: 1、系统时钟168MHz
* 2、打勾:Options/ c++ / One ELF Section per Function
* 3、编译优化级别:Level 3(-O3)
* 4、操作volatile声明的外部变量,是为了防止变量、函数被编译器优化
* 参 数: uint32_t ms 毫秒值
* 返回值: 无
******************************************************************************/
static volatile uint32_t ulTimesMS;
static void delay_ms(uint16_t ms)
{
ulTimesMS = ms * 16500;
while (ulTimesMS)
ulTimesMS--;
}
// 通信时序中的延时类型
#define DELAY_TIME6 0 // 0-不使用定时器、1-使用TIM6产生延时
// 这部分未启用,如需启用,请自行按需修改
#if DELAY_TIME6
// TIM6中断服务函数
void TIM6_DAC_IRQHandler(void) // 中断服务函数,可以写在任意文件中。建议直接在启动文件中复制名称,避免写错,而使NVIC无法找到中断函数,这种错误,编译时是不会报错的;
{
TIM6->SR = 0; // 清理中断标志
TIM6->CR1 = 0; // 停止TIM6
}
// TIM6 配置
void TIM6_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM6, ENABLE); // 使能定时器时钟
NVIC_InitTypeDef NVIC_InitStructure; // 声明优先级配置结构体
NVIC_InitStructure.NVIC_IRQChannel = TIM6_DAC_IRQn; // 中断通道来源
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; // 抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; // 子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 使能通道
NVIC_Init(&NVIC_InitStructure); // 配置写入寄存器
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; // 声明结构体
TIM_TimeBaseStructure.TIM_Prescaler = 84 - 1; // 分频; 把接口时钟分频后给计数器使用, 即多少个接口脉冲,才产生一次计数器脉冲; 简单理解:计算每一计数器脉冲的时长;
TIM_TimeBaseStructure.TIM_Period = 1 - 1; // ARR, 自动重载值; 多少个计数器脉冲作为一周期;
TIM_TimeBaseInit(TIM6, &TIM_TimeBaseStructure); // 初始化定时器,把配置写入寄存器
TIM_ClearFlag(TIM6, TIM_FLAG_Update); // 清理中断标志位
TIM_ITConfig(TIM6, TIM_IT_Update, ENABLE); // 开启定时器更新中断
TIM_Cmd(TIM6, DISABLE); // 使能定时器
}
static void delay_us(uint16_t us)
{
TIM6 -> ARR = us;
TIM6 -> CNT = 0x0;
TIM6 -> CR1 = 0x1 ;
while (TIM6->CR1 & 0x01) ;
}
#else
/******************************************************************************
* 函 数: delay_us
* 功 能: us 延时函数
* 备 注: 1、系统时钟168MHz
* 2、打勾:Options/ c++ / One ELF Section per Function
* 3、编译优化级别:Level 3(-O3)
* 4、操作volatile声明的外部变量,是为了防止变量、函数被编译器优化
* 参 数: uint32_t us 微秒值
* 返回值: 无
******************************************************************************/
static volatile uint32_t ulTimesUS;
static void delay_us(uint32_t us)
{
ulTimesUS = us * 17;
while (ulTimesUS)
ulTimesUS--;
}
#endif
// SDA引脚配置:输出模式
static void setSdaOutput(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0}; // 引脚工作模式 初始化结构体
GPIO_InitStruct.Pin = BH1750_SDA_PIN; // 引脚编号
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 引脚工作模式:推挽输出
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; // 引脚电平反转速度
HAL_GPIO_Init(BH1750_SDA_GPIO, &GPIO_InitStruct); // 初始化
}
// SDA引脚配置:输入模式
static void setSdaInput(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0}; // 引脚工作模式 初始化结构体
GPIO_InitStruct.Pin = BH1750_SDA_PIN; // 引脚编号
GPIO_InitStruct.Mode = GPIO_MODE_INPUT; // 引脚工作模式:输入
GPIO_InitStruct.Pull = GPIO_PULLUP; // 打开上拉,引脚闲时为高电平
HAL_GPIO_Init(BH1750_SDA_GPIO, &GPIO_InitStruct); // 初始化
}
// 产生IIC起始信号, SCL为高电平时,SDA由高电平向低电平跳变,起始信号开始,开始传送数据
void start(void)
{
setSdaOutput(); // sda线输出
SDA_1;
SCL_1;
delay_us(4);
SDA_0;
delay_us(4);
SCL_0; // 钳住I2C总线,准备发送或接收数据
}
// 产生IIC停止信号,SCL为高电平时,SDA由低电平向高电平跳变,结束传送数据
void stop(void)
{
setSdaOutput(); // sda线输出
SCL_0;
SDA_0;
delay_us(4);
SCL_1;
SDA_1; // 发送I2C总线结束信号
delay_us(4);
}
// 等待应答信号到来
// 接收数据的IC在接收到8bit数据后,向发送数据的IC发出特定的低电平脉冲,表示已经收到数据
// 返回值:1,接收应答失败
// 0,接收应答成功
uint8_t waitAck(void)
{
uint16_t errTime = 0;
SDA_1;
delay_us(1);
setSdaInput(); // SDA设置为输入
SCL_1;
delay_us(1);
while (READ_SDA) // 判断SDA电平
{
if (errTime++ > 1000) // 等待超过一定时间,就判断为没应答,退出
{
stop();
return 1;
}
}
SCL_0; // 时钟输出0
return 0;
}
// 产生ACK应答
void Ack(void)
{
SCL_0;
setSdaOutput();
SDA_0;
delay_us(2);
SCL_1;
delay_us(2);
SCL_0;
}
// 不产生ACK应答
void NAck(void)
{
SCL_0;
setSdaOutput();
SDA_1;
delay_us(2);
SCL_1;
delay_us(2);
SCL_0;
}
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void sendByte(uint8_t txd)
{
uint8_t t;
setSdaOutput();
SCL_0; // 拉低时钟装备开始数据传输
for (t = 0; t < 8; t++)
{
if (txd & 0x80)
SDA_1;
else
SDA_0;
txd <<= 1;
delay_us(2); // 这三个延时都是必须的
SCL_1;
delay_us(2);
SCL_0;
delay_us(2);
}
}
// 读1个字节,ack=1时,发送ACK,ack=0,发送NACK
uint8_t readByte(uint8_t ack)
{
uint8_t i, receive = 0;
setSdaInput(); // SDA设置为输入
for (i = 0; i < 8; i++)
{
SCL_0;
delay_us(2);
SCL_1;
receive <<= 1;
if (READ_SDA)
receive++;
delay_us(1);
}
if (!ack)
NAck(); // 发送nACK
else
Ack(); // 发送ACK
return receive; // 返回数据
}
// 向BH1750发送指令
void sendOrder(uint8_t cmd) // 按照BH1750数据手册编写
{
start(); // IIC起始信号
sendByte(BH1750_ADDR + 0); // 发送设备地址+写信号
while (waitAck());
sendByte(cmd); // 指令值
while (waitAck());
stop(); // 发送停止信号
delay_ms(1); // 稍停一下
}
/******************************************************************************
* 函数名: BH1750_Init
* 功 能: 初始化BH1750所用模拟IIC引脚
* 发送初始化指令
* 参 数: 无
* 返 回: 无
******************************************************************************/
void BH1750_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0}; // 引脚工作模式 初始化结构体
// 使能SCL引脚端口时钟
if (BH1750_SCL_GPIO == GPIOA) __HAL_RCC_GPIOA_CLK_ENABLE();
if (BH1750_SCL_GPIO == GPIOB) __HAL_RCC_GPIOB_CLK_ENABLE();
if (BH1750_SCL_GPIO == GPIOC) __HAL_RCC_GPIOC_CLK_ENABLE();
if (BH1750_SCL_GPIO == GPIOD) __HAL_RCC_GPIOD_CLK_ENABLE();
if (BH1750_SCL_GPIO == GPIOE) __HAL_RCC_GPIOE_CLK_ENABLE();
if (BH1750_SCL_GPIO == GPIOF) __HAL_RCC_GPIOF_CLK_ENABLE();
if (BH1750_SCL_GPIO == GPIOG) __HAL_RCC_GPIOG_CLK_ENABLE();
// SCL引脚 初始化设置
GPIO_InitStruct.Pin = BH1750_SCL_PIN; // 引脚编号
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 引脚工作模式:推挽输出
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; // 引脚电平反转速度
HAL_GPIO_Init(BH1750_SCL_GPIO, &GPIO_InitStruct); // 初始化
// 使能SDA引脚端口时钟
if (BH1750_SDA_GPIO == GPIOA) __HAL_RCC_GPIOA_CLK_ENABLE();
if (BH1750_SDA_GPIO == GPIOB) __HAL_RCC_GPIOB_CLK_ENABLE();
if (BH1750_SDA_GPIO == GPIOC) __HAL_RCC_GPIOC_CLK_ENABLE();
if (BH1750_SDA_GPIO == GPIOD) __HAL_RCC_GPIOD_CLK_ENABLE();
if (BH1750_SDA_GPIO == GPIOE) __HAL_RCC_GPIOE_CLK_ENABLE();
if (BH1750_SDA_GPIO == GPIOF) __HAL_RCC_GPIOF_CLK_ENABLE();
if (BH1750_SDA_GPIO == GPIOG) __HAL_RCC_GPIOG_CLK_ENABLE();
// SDA引脚 初始化设置
GPIO_InitStruct.Pin = BH1750_SDA_PIN; // 引脚编号
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 引脚工作模式:推挽输出
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; // 引脚电平反转速度
HAL_GPIO_Init(BH1750_SDA_GPIO, &GPIO_InitStruct); // 初始化
#if DELAY_TIM6
TIM6_Init();
#endif
SCL_1;
SDA_1;
sendOrder(BH1750_ON); // 发送启动命令
sendOrder(BH1750_RSET); // 发送重置命令,清除寄存器内容
sendOrder(BH1750_CON); // 设置模式:连续读取指令
delay_ms(180); // 发送指令120ms后可读取,这里延时180ms左右
}
/******************************************************************************
* 函数名: BH1750_GetData
* 功 能: 获取数据
* 参 数: 无
* 返 回: float 光照度数据
******************************************************************************/
float BH1750_GetData(void)
{
static uint8_t data[2];
start(); // IIC起始信号
sendByte(BH1750_ADDR + 1); // 发送设备地址+读信号
while (waitAck());
data[0] = readByte(1);
data[1] = readByte(0);
stop(); // IIC停止信号
return ((data[0] << 8) | data[1]) / 1.2f; // 合成光照强度
}
本实验代码,只作学习分享参考,使用责任自负。
如果发现程序有错,敬请联系作者,速度修正,好让后面的兄弟少走几步弯路。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 8
8 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)