1.27 Cubemx_STM32H7 软\硬件I2C
Cubemx_STM32H7 硬件I2C1、I2C简介2、Cubemx配置1、I2C简介• 400 kHz Compatibility• 8-byte Page (1K, 2K), 16-byte Page (4K, 8K, 16K) Write Modes• Self-timed Write Cycle (5 ms max)Pin Name Function:A0 − A2Address Inp
Cubemx_STM32H7 软\硬件I2C
1. I2C简介
1.1 I2C物理拓扑结构

I2C总线在物理连接上非常简单,分别由SDA(串行数据线)和SCL(串行时钟线)及上拉电阻组成。通信原理是通过对SCL和SDA线高低电平时序的控制,来产生I2C总线协议所需要的信号进行数据的传递。在总线空闲状态时,这两根线一般被上面所接的上拉电阻拉高,保持着高电平。
1.2 I2C总线特征
I2C总线上的每一个设备都可以作为主设备或者从设备,而且每一个设备都会对应一个唯一的地址(可以从I2C器件的数据手册得知),主从设备之间就通过这个地址来确定与哪个器件进行通信,在通常的应用中,我们把CPU带I2C总线接口的模块作为主设备,把挂接在总线上的其他设备都作为从设备。
I2C总线上可挂接的设备数量受总线的最大电容400pF 限制,如果所挂接的是相同型号的器件,则还受器件地址位的限制。
I2C总线数据传输速率在标准模式下可达100kbit/s,快速模式下可达400kbit/s,高速模式下可达3.4Mbit/s。一般通过I2C总线接口可编程时钟来实现传输速率的调整,同时也跟所接的上拉电阻的阻值有关。
I2C总线上的主设备与从设备之间以字节(8位)为单位进行双向的数据传输
1.3 I2C协议
I2C协议规定,总线上数据的传输必须以一个起始信号作为开始条件,以一个结束信号作为传输的停止条件。起始和结束信号总是由主设备产生。总线在空闲状态时,SCL和SDA都保持着高电平,当SCL为高电平而SDA由高到低的跳变,表示产生一个起始条件;当SCL为高而SDA由低到高的跳变,表示产生一个停止条件。在起始条件产生后,总线处于忙状态,由本次数据传输的主从设备独占,其他I2C器件无法访问总线;而在停止条件产生后,本次数据传输的主从设备将释放总线,总线再次处于空闲状态。如图所示:
在了解起始条件和停止条件后,我们再来看看在这个过程中数据的传输是如何进行的。前面我们已经提到过,数据传输以字节为单位。主设备在SCL线上产生每个时钟脉冲的过程中将在SDA线上传输一个数据位,当一个字节按数据位从高位到低位的顺序传输完后,紧接着从设备将拉低SDA线,回传给主设备一个应答位,此时才认为一个字节真正的被传输完成。当然,并不是所有的字节传输都必须有一个应答位,比如:当从设备不能再接收主设备发送的数据时,从设备将回传一个否定应答位。数据传输的过程如图所示:
在前面我们还提到过,I2C总线上的每一个设备都对应一个唯一的地址,主从设备之间的数据传输是建立在地址的基础上,也就是说,主设备在传输有效数据之前要先指定从设备的地址,地址指定的过程和上面数据传输的过程一样,只不过大多数从设备的地址是7位的,然后协议规定再给地址添加一个最低位用来表示接下来数据传输的方向,0表示主设备向从设备写数据,1表示主设备向从设备读数据。如图所示:
1.4 I2C总线操作
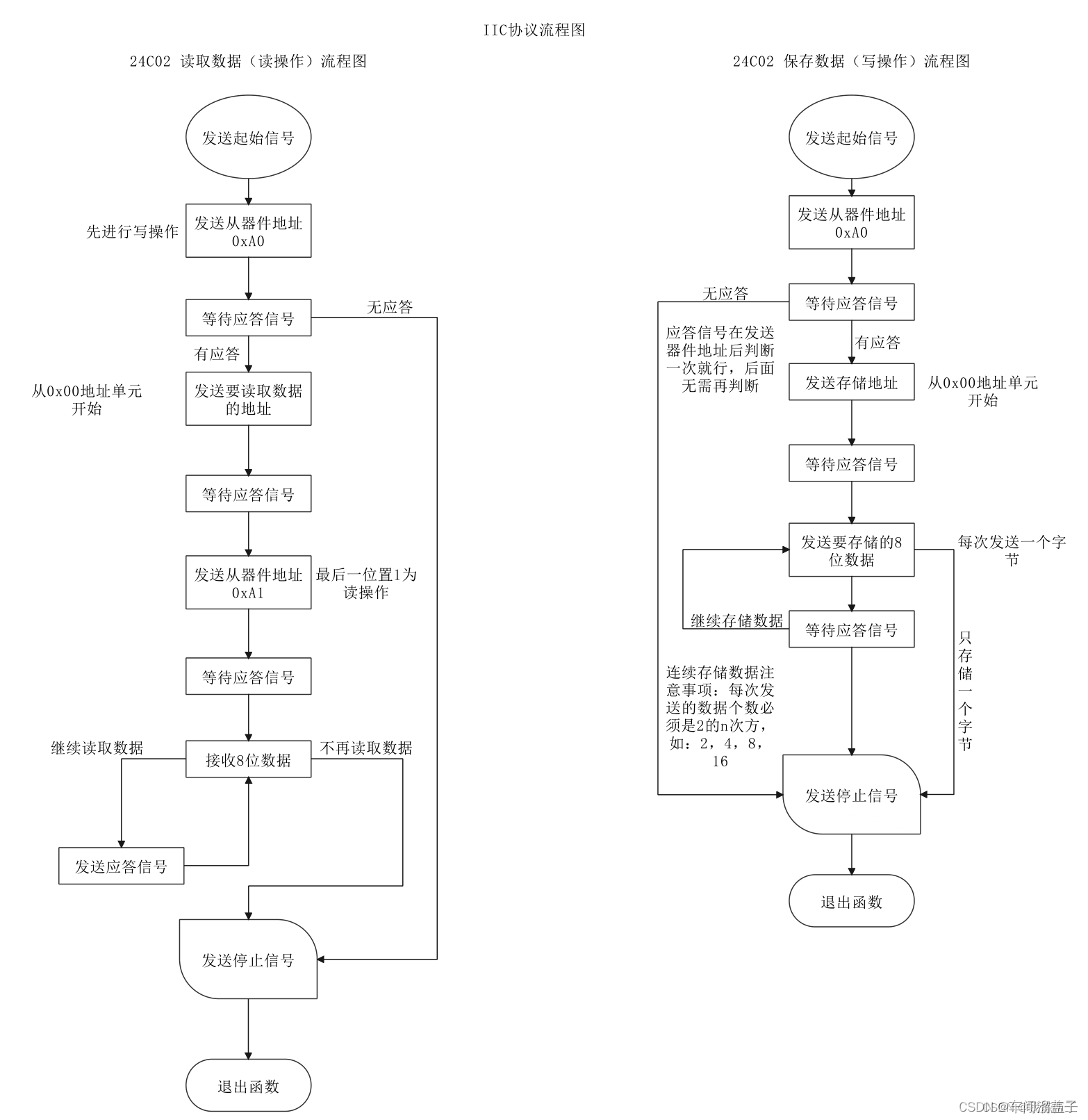
对I2C总线的操作实际就是主从设备之间的读写操作。大致可分为以下三种操作情况:
第一,主设备往从设备中写数据。数据传输格式如下: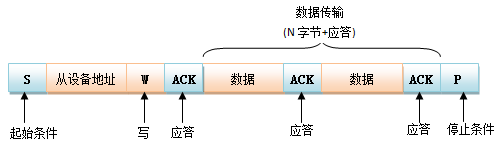
第二,主设备从从设备中读数据。数据传输格式如下:
第三,主设备往从设备中写数据,然后重启起始条件,紧接着从从设备中读取数据;或者是主设备从从设备中读数据,然后重启起始条件,紧接着主设备往从设备中写数据。数据传输格式如下:
第三种操作在单个主设备系统中,重复的开启起始条件机制要比用STOP终止传输后又再次开启总线更有效率。
1.5原理图
• 400 kHz Compatibility
• 8-byte Page (1K, 2K), 16-byte Page (4K, 8K, 16K) Write Modes
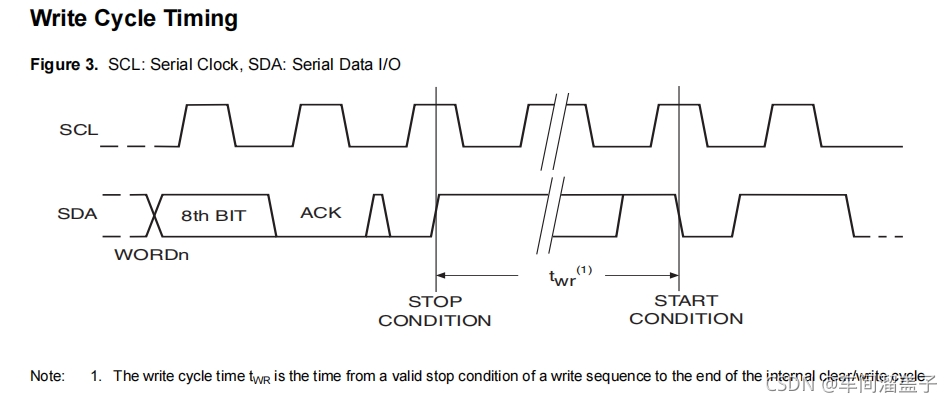
• Self-timed Write Cycle (5 ms max)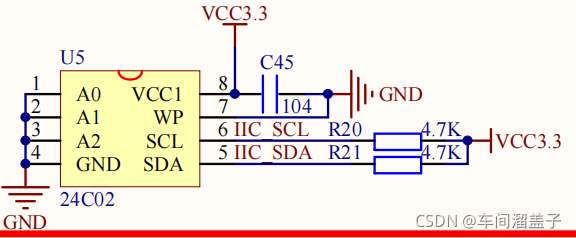
Pin Name Function:
| A0 − A2 | Address Inputs |
|---|---|
| SDA | Serial Data |
| SCL | Serial Clock Input |
| WP | Write Protect |
| NC | No Connect |
 |
|
 |
|
| 特别注意:写数据时,上次写完到下次开始写之间需要twr=5ms延时. |
2、硬件IIC Cubemx配置及代码

使能后为标志I2C默认配置,100K
生成的代码:
/* I2C2 init function */
void MX_I2C2_Init(void)
{
hi2c2.Instance = I2C2;
hi2c2.Init.Timing = 0x10C0ECFF;
hi2c2.Init.OwnAddress1 = 0;
hi2c2.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c2.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c2.Init.OwnAddress2 = 0;
hi2c2.Init.OwnAddress2Masks = I2C_OA2_NOMASK;
hi2c2.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c2.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c2) != HAL_OK)
{
Error_Handler();
}
/** Configure Analogue filter
*/
if (HAL_I2CEx_ConfigAnalogFilter(&hi2c2, I2C_ANALOGFILTER_ENABLE) != HAL_OK)
{
Error_Handler();
}
/** Configure Digital filter
*/
if (HAL_I2CEx_ConfigDigitalFilter(&hi2c2, 0) != HAL_OK)
{
Error_Handler();
}
}
void HAL_I2C_MspInit(I2C_HandleTypeDef* i2cHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(i2cHandle->Instance==I2C2)
{
/* USER CODE BEGIN I2C2_MspInit 0 */
/* USER CODE END I2C2_MspInit 0 */
__HAL_RCC_GPIOH_CLK_ENABLE();
/**I2C2 GPIO Configuration
PH4 ------> I2C2_SCL
PH5 ------> I2C2_SDA
*/
GPIO_InitStruct.Pin = GPIO_PIN_4|GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C2;
HAL_GPIO_Init(GPIOH, &GPIO_InitStruct);
/* I2C2 clock enable */
__HAL_RCC_I2C2_CLK_ENABLE();
/* USER CODE BEGIN I2C2_MspInit 1 */
/* USER CODE END I2C2_MspInit 1 */
}
}
测试代码
bsp_i2c.c
#include "bsp_i2c.h"
#define ADDR_24LCxx_Write 0xA0
#define ADDR_24LCxx_Read 0xA1
#define BufferSize 0x100
uint8_t I2C_Buffer_Write[BufferSize],ReadBuffer[BufferSize];
uint16_t i;
extern I2C_HandleTypeDef hi2c2;
void I2C_TEST(void)
{
printf("\r\n \r\n*********STM32CubeMX I2C AT24C02 Example*********\r\n");
printf("\r\n I2C Write Buffer:\r\n");
for(i=0; i<256; i++)
{
I2C_Buffer_Write[i]=i;
printf("%02X ", I2C_Buffer_Write[i]);
}
/* write data to AT24C02 */
for(i=0; i<256; i=i+8)
{
if (HAL_I2C_Mem_Write(&hi2c2, ADDR_24LCxx_Write, i, I2C_MEMADD_SIZE_8BIT,I2C_Buffer_Write+i,8, 10000) == HAL_OK)
// if (HAL_I2C_Mem_Write(&hi2c2, ADDR_24LCxx_Write, i, I2C_MEMADD_SIZE_8BIT,(uint8_t*)(&(I2C_Buffer_Write[i])),8, 10000) == HAL_OK)
{
printf("\r\n Byte %02d to Byte %02d Write OK",i,i+8);
HAL_Delay(5);//页写,5ms延时。32page*8Byte=256Byte
}
else
printf("\r\n Byte %02d to Byte %02d Write Failed",i,i+8);
}
/* read data from AT24C02 */
printf("\r\n Reading from AT24C02:\r\n");
HAL_I2C_Mem_Read(&hi2c2, ADDR_24LCxx_Read, 0, I2C_MEMADD_SIZE_8BIT,ReadBuffer,256, 1000);//读无需延时
for(i=0; i<256; i++)
{
printf("0x%02X ",ReadBuffer[i]);
}
/* data compare */
if(memcmp(ReadBuffer,I2C_Buffer_Write,256) == 0 ) /* check data */
printf("\r\n AT24C02 Read Test OK\r\n");
else
printf("\r\n AT24C02 Read Test Failed\r\n");
}
bsp_i2c.h
#ifndef _BSP_I2C_H
#define _BSP_I2C_H
#include "stm32h7xx.h"
#include "bsp_i2c.h"
#include <stdio.h>
#include <string.h>
void I2C_TEST(void);
#endif
3、硬件IIC代码解析
HAL库将I2C操作封装后提供了直接操作EEPROM的接口:
//EEPORM写函数
HAL_StatusTypeDef HAL_I2C_Mem_Write(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size, uint32_t Timeout)
//EEPORM读函数
HAL_StatusTypeDef HAL_I2C_Mem_Read(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size, uint32_t Timeout)
参数表:
| 参数 | 类型 | 含义 |
|---|---|---|
| hi2c | I2C_HandleTypeDef* | HAL库I2C结构体指针 |
| DevAddress | uint16_t | 器件地址 |
| MemAddress | uint16_t | 内存地址 |
| MemAddSize | uint16_t | 内存地址大小(8或16) |
| pData | uint8_t* | 缓冲区头指针 |
| Size | uint16_t | 缓冲区大小 |
| Timeout | uint32_t | 超时时间 |
返回值:
HAL_OK 成功
HAL_TIMEOUT 等待超时
HAL_BUSY 总线繁忙
HAL_ERROR 其他错误
4、软件IIC

bsp_soft_i2c.c
#include "bsp_i2c.h"
#include "pub_delay.h"
#include "bsp_soft_i2c.h"
//////////////////////////////////////////////////////////////////////////////////
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//ALIENTEK STM32F7开发板
//IIC驱动代码
//正点原子@ALIENTEK
//技术论坛:www.openedv.com
//创建日期:2015/12/28
//版本:V1.0
//版权所有,盗版必究。
//Copyright(C) 广州市星翼电子科技有限公司 2014-2024
//All rights reserved
//////////////////////////////////////////////////////////////////////////////////
//IIC初始化
void IIC_Init(void)
{
/*
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_GPIOH_CLK_ENABLE(); //使能GPIOH时钟
//PH4,5初始化设置
GPIO_Initure.Pin=GPIO_PIN_4|GPIO_PIN_5;
GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP; //推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_FREQ_VERY_HIGH; //快速
HAL_GPIO_Init(GPIOH,&GPIO_Initure);
*/
IIC_SDA(1);
IIC_SCL(1);
}
//产生IIC起始信号
void IIC_Start(void)
{
SDA_OUT(); //sda线输出
IIC_SDA(1);
IIC_SCL(1);
delay_us(4);
IIC_SDA(0);//START:when CLK is high,DATA change form high to low
delay_us(4);
IIC_SCL(0);//钳住I2C总线,准备发送或接收数据
}
//产生IIC停止信号
void IIC_Stop(void)
{
SDA_OUT();//sda线输出
IIC_SCL(0);
IIC_SDA(0);//STOP:when CLK is high DATA change form low to high
delay_us(4);
IIC_SCL(1);
IIC_SDA(1);//发送I2C总线结束信号
delay_us(4);
}
//等待应答信号到来
//返回值:1,接收应答失败
// 0,接收应答成功
u8 IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
SDA_IN(); //SDA设置为输入
IIC_SDA(1);delay_us(1);
IIC_SCL(1);delay_us(1);
while(READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop();
return 1;
}
}
IIC_SCL(0);//时钟输出0
return 0;
}
//产生ACK应答
void IIC_Ack(void)
{
IIC_SCL(0);
SDA_OUT();
IIC_SDA(0);
delay_us(2);
IIC_SCL(1);
delay_us(2);
IIC_SCL(0);
}
//不产生ACK应答
void IIC_NAck(void)
{
IIC_SCL(0);
SDA_OUT();
IIC_SDA(1);
delay_us(2);
IIC_SCL(1);
delay_us(2);
IIC_SCL(0);
}
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void IIC_Send_Byte(u8 txd)
{
u8 t;
SDA_OUT();
IIC_SCL(0);//拉低时钟开始数据传输
for(t=0;t<8;t++)
{
IIC_SDA((txd&0x80)>>7);
txd<<=1;
delay_us(2); //对TEA5767这三个延时都是必须的
IIC_SCL(1);
delay_us(2);
IIC_SCL(0);
delay_us(2);
}
}
//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
u8 IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )
{
IIC_SCL(0);
delay_us(2);
IIC_SCL(1);
receive<<=1;
if(READ_SDA)receive++;
delay_us(1);
}
if (!ack)
IIC_NAck();//发送nACK
else
IIC_Ack(); //发送ACK
return receive;
}
bsp_soft_i2c.h
#ifndef _BSP_SOFT_I2C_H
#define _BSP_SOFT_I2C_H
#include "sys.h"
//////////////////////////////////////////////////////////////////////////////////
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//ALIENTEK STM32F7开发板
//IIC驱动代码
//正点原子@ALIENTEK
//技术论坛:www.openedv.com
//创建日期:2015/11/30
//版本:V1.0
//版权所有,盗版必究。
//Copyright(C) 广州市星翼电子科技有限公司 2014-2024
//All rights reserved
//////////////////////////////////////////////////////////////////////////////////
//IO方向设置
#define SDA_IN() {GPIOH->MODER&=~(3<<(5*2));GPIOH->MODER|=0<<5*2;} //PH5输入模式
#define SDA_OUT() {GPIOH->MODER&=~(3<<(5*2));GPIOH->MODER|=1<<5*2;} //PH5输出模式
//IO操作
#define IIC_SCL(n) (n?HAL_GPIO_WritePin(GPIOH,GPIO_PIN_4,GPIO_PIN_SET):HAL_GPIO_WritePin(GPIOH,GPIO_PIN_4,GPIO_PIN_RESET)) //SCL
#define IIC_SDA(n) (n?HAL_GPIO_WritePin(GPIOH,GPIO_PIN_5,GPIO_PIN_SET):HAL_GPIO_WritePin(GPIOH,GPIO_PIN_5,GPIO_PIN_RESET)) //SDA
#define READ_SDA HAL_GPIO_ReadPin(GPIOH,GPIO_PIN_5) //输入SDA
//IIC所有操作函数
void IIC_Init(void); //初始化IIC的IO口
void IIC_Start(void); //发送IIC开始信号
void IIC_Stop(void); //发送IIC停止信号
void IIC_Send_Byte(u8 txd); //IIC发送一个字节
u8 IIC_Read_Byte(unsigned char ack);//IIC读取一个字节
u8 IIC_Wait_Ack(void); //IIC等待ACK信号
void IIC_Ack(void); //IIC发送ACK信号
void IIC_NAck(void); //IIC不发送ACK信号
void IIC_Write_One_Byte(u8 daddr,u8 addr,u8 data);
u8 IIC_Read_One_Byte(u8 daddr,u8 addr);
#endif
bsp_24cxx.c
#include "bsp_24cxx.h"
#include "pub_delay.h"
#include "bsp_led.h"
#include "bsp_soft_i2c.h"
//////////////////////////////////////////////////////////////////////////////////
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//ALIENTEK STM32F7开发板
//24CXX驱动代码
//正点原子@ALIENTEK
//技术论坛:www.openedv.com
//创建日期:2015/12/28
//版本:V1.0
//版权所有,盗版必究。
//Copyright(C) 广州市星翼电子科技有限公司 2014-2024
//All rights reserved
//////////////////////////////////////////////////////////////////////////////////
//初始化IIC接口
void AT24CXX_Init(void)
{
IIC_Init();//IIC初始化
}
//在AT24CXX指定地址读出一个数据
//ReadAddr:开始读数的地址
//返回值 :读到的数据
u8 AT24CXX_ReadOneByte(u16 ReadAddr)
{
u8 temp=0;
IIC_Start();
if(EE_TYPE>AT24C16)
{
IIC_Send_Byte(0XA0); //发送写命令
IIC_Wait_Ack();
IIC_Send_Byte(ReadAddr>>8);//发送高地址
}else IIC_Send_Byte(0XA0+((ReadAddr/256)<<1)); //发送器件地址0XA0,写数据
IIC_Wait_Ack();
IIC_Send_Byte(ReadAddr%256); //发送低地址
IIC_Wait_Ack();
IIC_Start();
IIC_Send_Byte(0XA1); //进入接收模式
IIC_Wait_Ack();
temp=IIC_Read_Byte(0);
IIC_Stop();//产生一个停止条件
return temp;
}
//在AT24CXX指定地址写入一个数据
//WriteAddr :写入数据的目的地址
//DataToWrite:要写入的数据
void AT24CXX_WriteOneByte(u16 WriteAddr,u8 DataToWrite)
{
IIC_Start();
if(EE_TYPE>AT24C16)
{
IIC_Send_Byte(0XA0); //发送写命令
IIC_Wait_Ack();
IIC_Send_Byte(WriteAddr>>8);//发送高地址
}else IIC_Send_Byte(0XA0+((WriteAddr/256)<<1)); //发送器件地址0XA0,写数据
IIC_Wait_Ack();
IIC_Send_Byte(WriteAddr%256); //发送低地址
IIC_Wait_Ack();
IIC_Send_Byte(DataToWrite); //发送字节
IIC_Wait_Ack();
IIC_Stop();//产生一个停止条件
delay_ms(10);
}
//在AT24CXX里面的指定地址开始写入长度为Len的数据
//该函数用于写入16bit或者32bit的数据.
//WriteAddr :开始写入的地址
//DataToWrite:数据数组首地址
//Len :要写入数据的长度2,4
void AT24CXX_WriteLenByte(u16 WriteAddr,u32 DataToWrite,u8 Len)
{
u8 t;
for(t=0;t<Len;t++)
{
AT24CXX_WriteOneByte(WriteAddr+t,(DataToWrite>>(8*t))&0xff);
}
}
//在AT24CXX里面的指定地址开始读出长度为Len的数据
//该函数用于读出16bit或者32bit的数据.
//ReadAddr :开始读出的地址
//返回值 :数据
//Len :要读出数据的长度2,4
u32 AT24CXX_ReadLenByte(u16 ReadAddr,u8 Len)
{
u8 t;
u32 temp=0;
for(t=0;t<Len;t++)
{
temp<<=8;
temp+=AT24CXX_ReadOneByte(ReadAddr+Len-t-1);
}
return temp;
}
//检查AT24CXX是否正常
//这里用了24XX的最后一个地址(255)来存储标志字.
//如果用其他24C系列,这个地址要修改
//返回1:检测失败
//返回0:检测成功
u8 AT24CXX_Check(void)
{
u8 temp;
temp=AT24CXX_ReadOneByte(255);//避免每次开机都写AT24CXX
if(temp==0X55)return 0;
else//排除第一次初始化的情况
{
AT24CXX_WriteOneByte(255,0X55);
temp=AT24CXX_ReadOneByte(255);
if(temp==0X55)return 0;
}
return 1;
}
//在AT24CXX里面的指定地址开始读出指定个数的数据
//ReadAddr :开始读出的地址 对24c02为0~255
//pBuffer :数据数组首地址
//NumToRead:要读出数据的个数
void AT24CXX_Read(u16 ReadAddr,u8 *pBuffer,u16 NumToRead)
{
while(NumToRead)
{
*pBuffer++=AT24CXX_ReadOneByte(ReadAddr++);
NumToRead--;
}
}
//在AT24CXX里面的指定地址开始写入指定个数的数据
//WriteAddr :开始写入的地址 对24c02为0~255
//pBuffer :数据数组首地址
//NumToWrite:要写入数据的个数
void AT24CXX_Write(u16 WriteAddr,u8 *pBuffer,u16 NumToWrite)
{
while(NumToWrite--)
{
AT24CXX_WriteOneByte(WriteAddr,*pBuffer);
WriteAddr++;
pBuffer++;
}
}
void Soft_I2C_Test(void)
{
uint8_t TX_Buffer[256],RX_BUFFER[256],Adress=0;
uint16_t i;
IIC_Init();
while(AT24CXX_Check())//检测不到24c02
{
HAL_Delay(500);
LED0_TOGGLE;
LED1_TOGGLE;
}
for(i=0;i<256;i++)
{
TX_Buffer[i] = i;
}
AT24CXX_Write(Adress,(u8*)TX_Buffer,sizeof(TX_Buffer));
AT24CXX_Read(Adress,RX_BUFFER,sizeof(RX_BUFFER));
if(memcmp(RX_BUFFER,TX_Buffer,sizeof(RX_BUFFER)) == 0)
{
printf("I2C TEST OK");
}
else
{
printf("I2C TEST FAILURE");
}
}
bsp_24cxx.h
#ifndef _24CXX_H
#define _24CXX_H
#include "sys.h"
#include "bsp_i2c.h"
//////////////////////////////////////////////////////////////////////////////////
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//ALIENTEK STM32F7开发板
//SDRAM驱动代码
//正点原子@ALIENTEK
//技术论坛:www.openedv.com
//创建日期:2015/12/28
//版本:V1.0
//版权所有,盗版必究。
//Copyright(C) 广州市星翼电子科技有限公司 2014-2024
//All rights reserved
//////////////////////////////////////////////////////////////////////////////////
#define AT24C01 127
#define AT24C02 255
#define AT24C04 511
#define AT24C08 1023
#define AT24C16 2047
#define AT24C32 4095
#define AT24C64 8191
#define AT24C128 16383
#define AT24C256 32767
//STM32 F746开发板使用的是24c02,所以定义EE_TYPE为AT24C02
#define EE_TYPE AT24C02
u8 AT24CXX_ReadOneByte(u16 ReadAddr); //指定地址读取一个字节
void AT24CXX_WriteOneByte(u16 WriteAddr,u8 DataToWrite); //指定地址写入一个字节
void AT24CXX_WriteLenByte(u16 WriteAddr,u32 DataToWrite,u8 Len);//指定地址开始写入指定长度的数据
u32 AT24CXX_ReadLenByte(u16 ReadAddr,u8 Len); //指定地址开始读取指定长度数据
void AT24CXX_Write(u16 WriteAddr,u8 *pBuffer,u16 NumToWrite); //从指定地址开始写入指定长度的数据
void AT24CXX_Read(u16 ReadAddr,u8 *pBuffer,u16 NumToRead); //从指定地址开始读出指定长度的数据
u8 AT24CXX_Check(void); //检查器件
void AT24CXX_Init(void); //初始化IIC
void Soft_I2C_Test(void);
#endif
主函数直接调用:
void Soft_I2C_Test(void)
进行测试

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 6
6 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)