S形曲线规划方式汇总
本文主要讲述S形速度规划方案,包括sigmoid函数、sin函数和bezier曲线速度方案。已知初速度Vs,末速度Ve,规划速度曲线分别是sigmoid函数曲线、sin函数曲线、bezier曲线。
一 曲线速度规划方案
1 sigmoid函数曲线速度规划
这种方式在前面博文https://blog.csdn.net/liuzhijun301/article/details/103978087中已经讲述过,对于初速度为𝑣s,末速度为𝑣e,运动步数为2n的纯加/减速段,对于其中第i步,可以规划速度为:

2 三角函数曲线速度规划
对于初速度为vs,末速度为ve,运动总步数为n的纯加减速段,对于其中第i步,规划速度为:

3 Bezier曲线速度规划
对于Bezier曲线的原理介绍见https://www.jianshu.com/p/8f82db9556d2
这里以开源cnc项目Marlin2.0中的s形速度规划举例。marlin2.0中采用了6点Bezier曲线。6点Bezier曲线是5阶形式:
V(t) = P_0 * B_0(t) + P_1 * B_1(t) + P_2 * B_2(t) + P_3 * B_3(t) + P_4 * B_4(t) + P_5 * B_5(t),0<t<1
其中:
B_0(t) = (1-t)^5 = -t^5 + 5t^4 - 10t^3 + 10t^2 - 5t + 1
B_1(t) = 5(1-t)^4 * t = 5t^5 - 20t^4 + 30t^3 - 20t^2 + 5t
B_2(t) = 10(1-t)^3 * t^2 = -10t^5 + 30t^4 - 30t^3 + 10t^2
B_3(t) = 10(1-t)^2 * t^3 = 10t^5 - 20t^4 + 10t^3
B_4(t) = 5(1-t) * t^4 = -5t^5 + 5t^4
B_5(t) = t^5 = t^5
V(t)可以改写为:
V(t) = A*t^5 + B*t^4 + C*t^3 + D*t^2 + E*t + F
其中:
A = -P_0 + 5*P_1 - 10*P_2 + 10*P_3 - 5*P_4 + P_5
B = 5*P_0 - 20*P_1 + 30*P_2 - 20*P_3 + 5*P_4
C = -10*P_0 + 30*P_1 - 30*P_2 + 10*P_3
D = 10*P_0 - 20*P_1 + 10*P_2
E = - 5*P_0 + 5*P_1
F = P_0
我们希望初始加速度和初始jerk都为0,因此我们设置P_i=P_0 = P_1 = P_2 (initial velocity),P_t = P_3 = P_4 = P_5 (target velocity),经过简化以后有:
A = - 6*P_i + 6*P_t = 6*(P_t - P_i)
B = 15*P_i - 15*P_t = 15*(P_i - P_t)
C = -10*P_i + 10*P_t = 10*(P_t - P_i)
D = 0
E = 0
F = P_i
此时有 V(t) = A*t^5 + B*t^4 + C*t^3 + F [0 <= t <= 1]
二 Matlab代码实现
matlab实现上述3种曲线规划代码:
clc;clear;
flex=5;
vmin=10;
vmax=100;
num=15;
for i=0:1:2*num+1
t(i+1)=i;
y(i+1)=vmin+(vmax-vmin)/(1+exp(-flex*(i-num)/num));%simoid
z(i+1)=vmin+(vmax-vmin)/(2*num)*i;%梯形
e(i+1)=vmin+(vmax-vmin)*(i/(2*num)-1/(2*pi)*sin(2*pi/(2*num)*i));%sin曲线
f(i+1)=6*(vmax-vmin)*(i/(2*num))^5+15*(vmin-vmax)*(i/(2*num))^4+10*(vmax-vmin)*(i/(2*num))^3+vmin;%bezier曲线
end
plot(t,y,t,z,t,f)
hold on;grid on;legend波形如下:
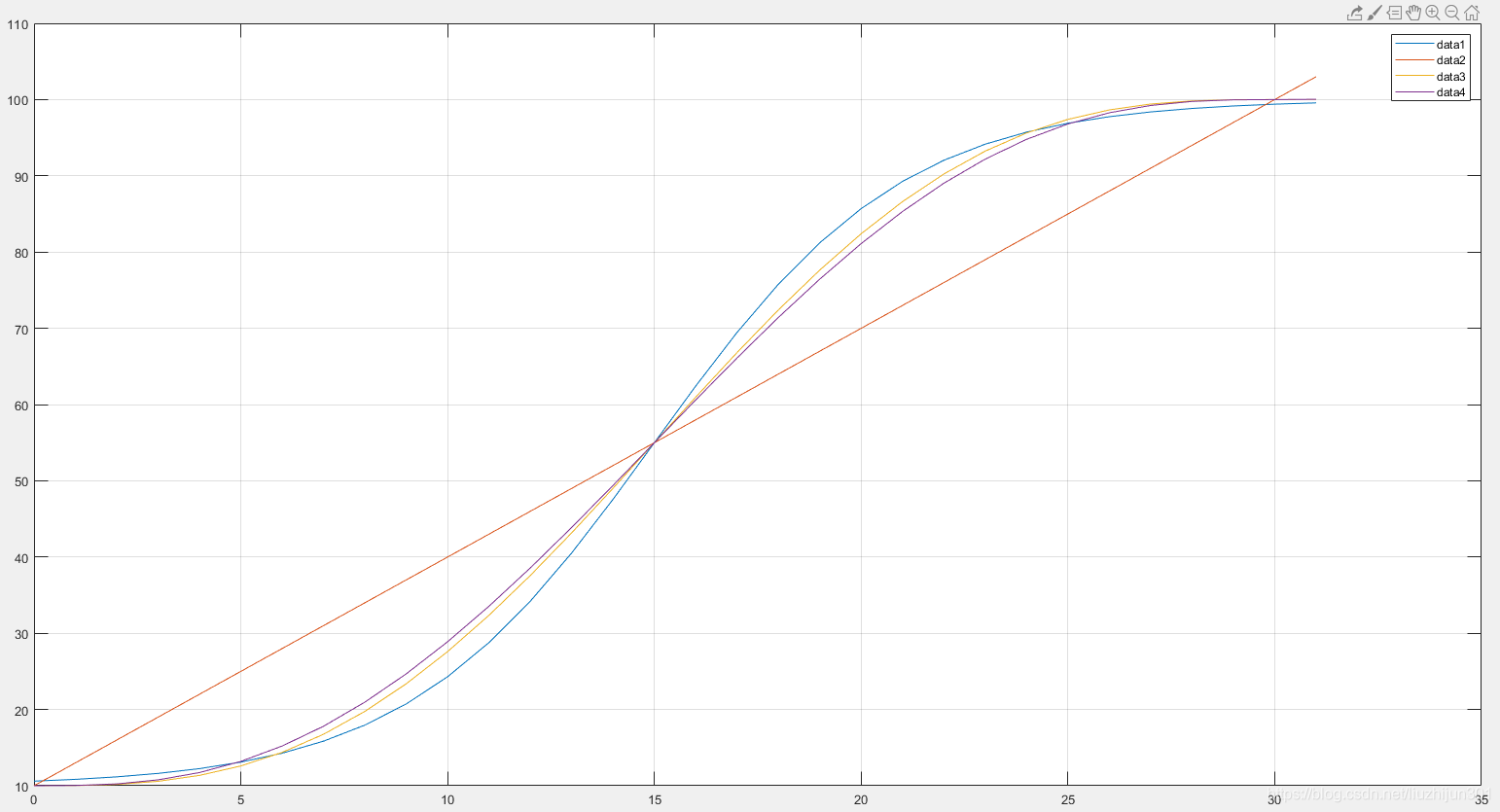
data1-4分别是sigmoid、梯形、sin、bezier曲线速度规划的速度曲线。
可以看到三种曲线形状差不多,但以bezier曲线最为柔和。运算量方面,sigmoid要执行e的幂运算所以较难优化,sin函数可以用转化成定点查表法进行优化,bezier曲线只涉及浮点乘法运算量速度相对sigmoid会较快,相对优化的sin函数则会较慢。下面画出sigmoid、sin和bezier三种曲线规划时的加速度曲线:
for i=0:1:2*num+1
if i>0
err1(i+1)=(y(i+1)-y(i))/(1/(2*num));
err2(i+1)=(e(i+1)-e(i))/(1/(2*num));
err3(i+1)=(f(i+1)-f(i))/(1/(2*num));
end
end
figure;
plot(t,err1,t,err2,t,err3);grid on;legend;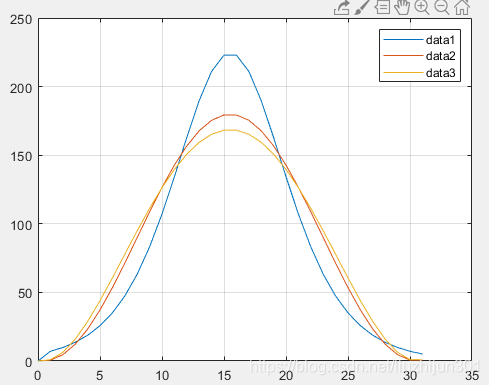
可见最大加速度最大依次是sigmoid>sin>bezier

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 14
14 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)