全双工串口、半双工串口总线及其转换
前言
这是本人在接触串口总线时的一些总结,希望能对大家有所帮助,若有谬误之处,恳请各位指正。
全双工串口
全双工串口是非常常见的一种串口,在此不过多介绍。
在物理上,其最简单的组成为 GND、TX、RX 三根线,其中 TX 通常使用 推挽输出,对高电平和低电平的驱动能力均较强,常见实现为下图的 CMOS 逻辑和 TTL 逻辑。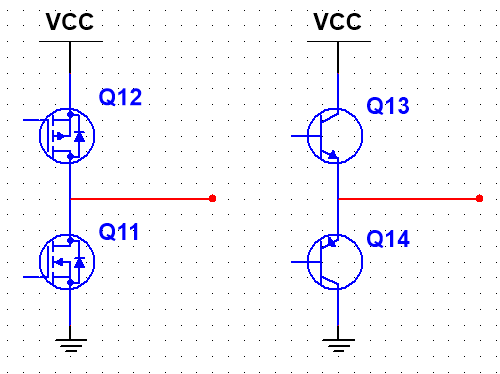
半双工串口总线
相比全双工串口,半双工串口总线仅使用一条数据线,数据在该线上可以双向流动,各设备连在一条总线上,可以 从总线获取来自其他设备的数据 或 驱动总线向其他设备发送数据,由于各设备均能驱动总线,因此为了防止竞争电平,总线往往采用 线与 的形式,即仅当没有任何设备驱动总线至低电平时总线才能保持高电平,而只要任一设备驱动至低电平则总线就为低电平。
这要求挂在在总线上的设备均为 开漏输出,即只有对低电平的驱动能力,而当输出高时则保持高阻态,不驱动总线,由总线上的上拉电阻将总线拉高。
下图展示了总线的驱动形式,Q1 ~ Q4 代表了 4 个设备对总线的驱动,只有它们全部关断,总线才为高电平。
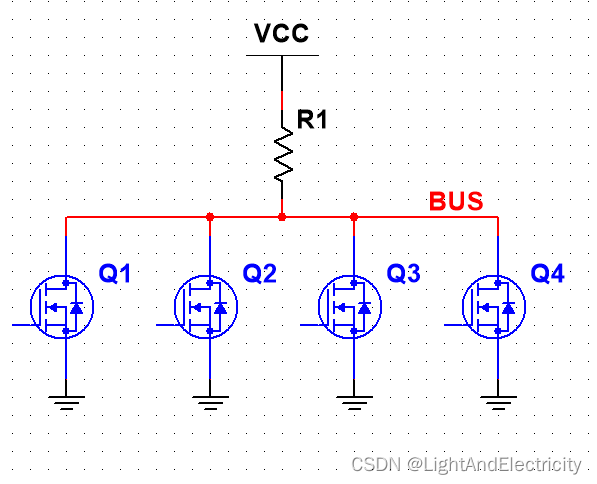
有了上面的电路形式,即使某一设备输出高,而同时另一设备输出低,也不会引起竞争电平,即不会短路造成电路故障。诚然,由于此时总线电平为低,输出高的设备的输出无效了,会导致数据的丢失。因此总线上不应有两个设备同时发送数据,这涉及总线仲裁的问题,在此不详细讨论。
两者转换
在单片机上,我们一般接触到的是全双工串口,虽然像 STM32 的有些芯片的串口也支持单线半双工模式,但此处不研究,主要讨论如何使用全双工串口的 TX、RX 驱动串口总线 BUS。
对比两种串口的区别并考虑到我们的目的,我们主要需要解决两个问题:
① 输出必须是开漏输出。
② 从总线接收的数据应当是其他设备的而不是自己的,即不应产生环回。
软硬件配合方案
若单片机的功能支持且配置比较容易的话,我们可进行以下操作:
① 将单片机的 TX、RX 接在一起,并接到 BUS 上,并为 BUS 连接合适的上拉电阻。
② 将 TX 配置为开漏输出。
③ 每次发送数据前屏蔽串口数据接收,如关闭串口中断,发送完成后再开启。
这一方案电路简单,但软件上的操作麻烦,当需要频繁发送数据时比较耗损性能。
纯电路方案
对于我们要设计的转换电路,除了供电和地,它应有 TX、RX 和 BUS 三个接口,注意此处的 TX、RX 是对转换电路这一主体而言的,BUS 上的信号会被发到 TX 上送出转换电路,RX 接收外来信号,发到 BUS 上去。
① 为满足 BUS 必须是开漏的要求,我们应 阻止来自 RX 的推挽的高电平,转而将其变为高阻态。
② 为满足避免数据环回的要求,我们要防止 RX 接收的信号再通过 TX 发回去,考虑到串口的空闲电平为高电平,那么就是要 对 TX 屏蔽 RX 所接到的低电平信号。
结合上述分析,我们可以使用 可控的三态输出的数据缓冲器 来满足这一需求,如下图:
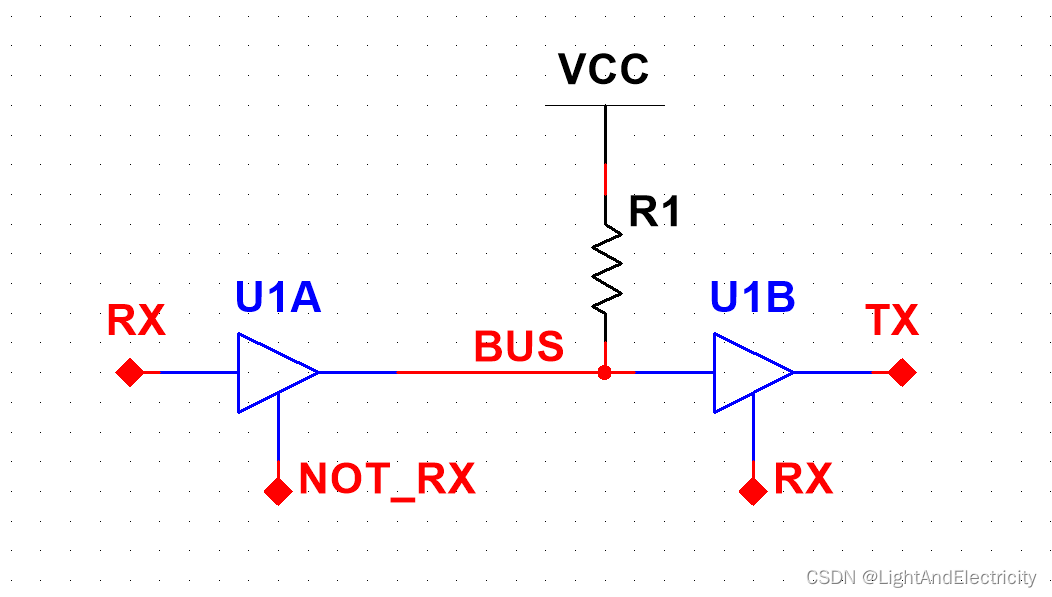
其中 NOT_RX 即为 ~RX,当 RX 为高电平,NOT_RX 为低,U1A 不工作,输出高阻态,BUS 由 R1 上拉至高电平;当 RX 收到低电平,NOT_RX 为高,U1A 工作,BUS 变为低电平,但 U1B 不工作,TX 不受影响;当 RX 保持高电平时若 BUS 有来自其他设备的信号,变为低电平,而由于此时 U1B 工作,则能正常传输到 TX。
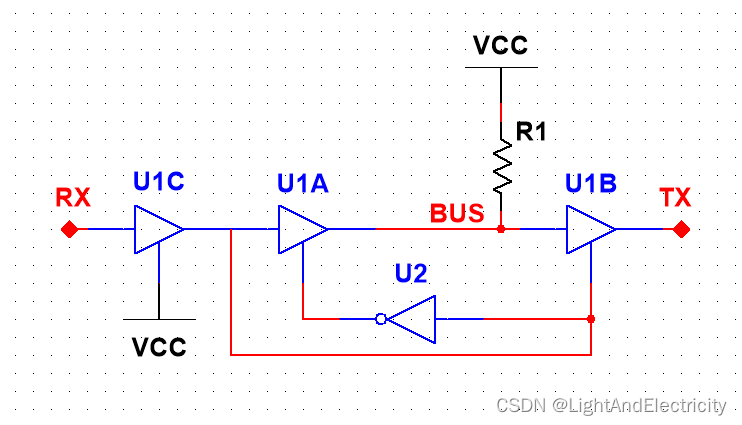
上图为方便解释,较为简化,下图则更为完整。其中 U1C 为常使能状态,主要起提高 RX 来的信号的驱动能力的作用。
为搭建此电路,可使用 74HC126D 这一芯片,这是一个包含 4 个可控的三态输出的数据缓冲器的芯片。其输入包括箝位二极管,这使得能够使用限流电阻将输入连接到超过 VCC 的电压。
其引脚分布如下图: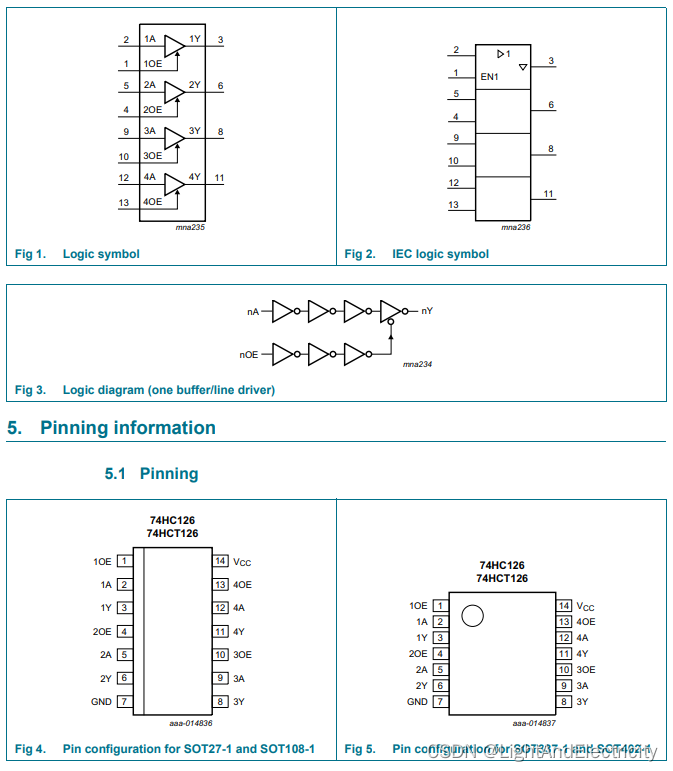
对于电路中的反相器,可使用反相器芯片,也可使用源极接地的 NMOS 结合上拉电阻的方式实现,也可以将 74HC126D 的其中一个数据缓冲器的 A 接地,当成源极接地的 NMOS 再结合上拉电阻实现。
这一纯电路方案在至少 115200 波特率的条件下可以正常工作,更高速度尚未测试,对于波特率极高的情况下,则应当更严格地考虑器件的响应速度等因素,并进行大量数据收发的测试。
附一种我认为比较便于布线的连接方式,仅供参考: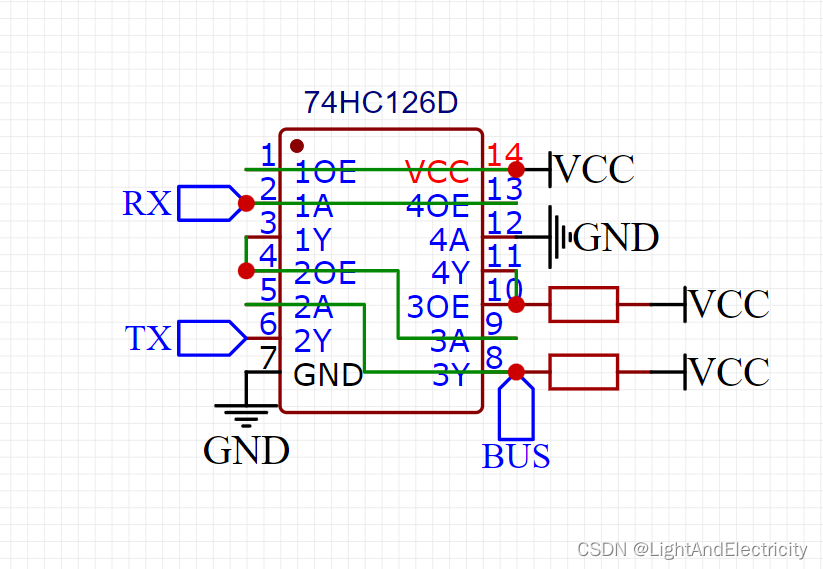
这一连接方式把反相器的位置提前了,使 RX 的信号同时进入缓冲器和反相器,个人认为这将更有利于正向和反向信号的同步,防止经反相器后的信号在时间上落后过多。当然,从芯片手册来看,OE 端输入的延迟要高于 A 端输入的延迟,因此经反相器的信号应该仍然有所落后,在此暂且不详细讨论。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 13
13 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)