智能车模块详解——数据存储与读写(eeprom/flash)
讲解数据读写函数,以及数据存储
目录
在调参(如PID)我们需要把参数保存下来,即使关电也能保存,并且需要的时候能够读取。
这就需要数据存储模块。
数据读写
TC264自带FLASH,
STC32G自带eeprom,
逐飞已经写好了相应的库,因此读写函数方面直接调用即可。
如果你用的是这两块板子,直接转到下面的数据存储方面的讲解
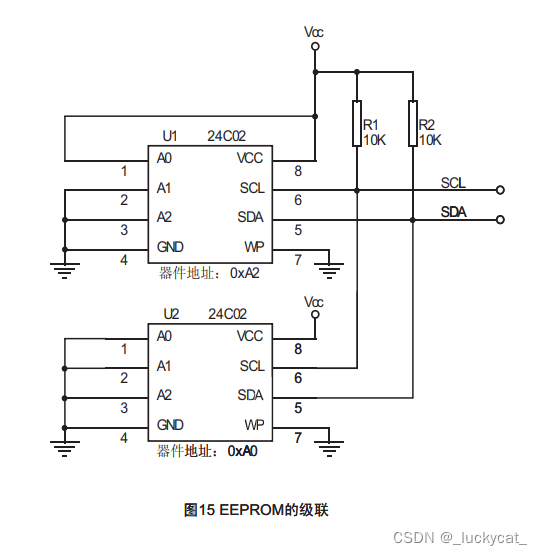
我当时用的是STC16F,不自带eeprom,所以硬件画了个AT24C02模块,数据的读写用的IIC通信。逐飞写了AT24C02的库。
AT24C02详解(蓝桥杯单片机模块(IIC总线))__WILLPOWER_的博客-CSDN博客_at24c02
AT24C02 E2PROM芯片详解_Z小旋的博客-CSDN博客_at24c02
下面简单讲一下怎么用,当然这都需要自己去研究
设备地址:
设备需要一个8位的设备地址字,后面跟着一个启动条件,以使芯片能够进行读或写操作
设备地址字由一个强制的1,0序列的前四个最有效的位,如所示。这是所有EEPROM设备的共同特点。
接下来的3位是1K/2K EEPROM的A2、A1和AO设备地址位。这3位必须与相应的硬接线输入引脚相比较。
最后一位为0表示写。最后一位为1表示读
前4位已经固定了,是1010换成BCD码就是A
举个例子,假设,我A2,A1,A0都接地 即;A2 = 0 A1 = 0 A0 = 0
那么写地址就是1010 0000 也就是0xA0
假设,我A2,A1,A0都接了高电平 即;A2 = 1 A1 =1 A0 = 1
那么写地址就是1010 1110 也就是0xAE
这是24C02硬件手册的一个图

//AT24C02模块支持256个8位数据存储 //该模块使用的是IIC总线控制 #define AT24C02_DEV_ADDR 0xA0>>1 //IIC写入时的地址字节数据,+1为读取 //AT24C02的地址是可变地址当A0 = 0 A1 = 0 A2 = 0的时候, //设备地址位A0,如果需要修改设备地址,请查看AT24C02手册进行修改
然后我们看SEEKFREE_AT24C02.c文件
uint8 at24c02_read_byte(uint8 byte_reg)
{
delay_ms(6);
return simiic_read_reg(AT24C02_DEV_ADDR, byte_reg, SIMIIC);
}
发现用的是模拟IIC,
因此我们就需要到SEEKFREE_IIC.h文件中去找/修改 模拟IIC的SCL与SDA引脚
#define SIMIIC_SCL_PIN P32
#define SIMIIC_SDA_PIN P33
当然也可以参照这个库,改成硬件IIC
这些做完就可以调用AT24c02的读取与写入了
void at24c02_write_byte(uint8 byte_reg, uint8 dat);
uint8 at24c02_read_byte(uint8 byte_reg);
void at24c02_write_bytes(uint8 byte_reg, uint8 *dat_add, uint8 num);
void at24c02_read_bytes(uint8 byte_reg, uint8 *dat_add, uint8 num);数据存储
有了上面的函数,我们就可以进行寄存器的读写
这是我代码的思路
/****************************************** 参数写入 ******************************************/
uint8 FlashParamsWrite(void)
{
uint8 i;//第几个数据
uint8 cnt_i = 0;//地址的第几位
uint8 cnt_f = 0;//地址的第几位
//显示界面
ips114_clear(BLUE);
IPS114_PENCOLOR = RED;
ips114_showstr(0,3,"Start Write Params !");
delay_ms(10);
//读取参数 (赋值)
/*^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^*/
integnow[0]=Integ_data0;
integnow[1]=Integ_data1;
integnow[2]=Integ_data2;
integnow[3]=Integ_data3;
/*^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^*/
uint8dat[0]=uint8_data0;
uint8dat[1]=uint8_data1;
uint8dat[2]=uint8_data2;
/*^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^*/
//拆分字节准备写入参数
for(i=0;i<Integ_Num;i++)
{
integdat[cnt_i++]=BYTE0(integnow[i]);
integdat[cnt_i++]=BYTE1(integnow[i]);
}
//写flash(仅单个寄存器)
at24c02_write_bytes(integReg,integdat,2*Integ_Num);
at24c02_write_bytes(uint8Reg,uint8dat,uint8_Num);
ips114_clear(BLUE);
ips114_showstr(0,3,"Write Params OK!");
delay_ms(10);
return 1;
}/****************************************** 参数读取 ******************************************/
uint8 FlashParamsRead(void)
{
uint8 i;
//读整数--
at24c02_read_bytes(integReg, integdat,2*Integ_Num);
//合并字节准备写入参数
for(i=0;i<Integ_Num;i++)
{
integnow[i]=(integdat[2*i]<<8)|integdat[2*i+1];
}
//读uint8
at24c02_read_bytes(uint8Reg, uint8dat,uint8_Num);
//写各个参数
/*^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^*/
Integ_data1=integnow[1];
Integ_data2=integnow[2];
Integ_data3=integnow[3];
Integ_data4=integnow[4];
/*^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^*/
uint8_data0=uint8dat[0];
uint8_data1=uint8dat[1];
uint8_data2=uint8dat[2];
uint8_data3=uint8dat[3];
/*^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^*/
delay_ms(200);
return 1;
}系列文章目录
文章分为三个层次
速通版
是希望通过简化的步骤搭建出寻迹小车,进而了解整个智能车是如何实现的,快速上手,为后续参与智能车竞赛做基础。
如果只是为了完成学校智能车初期培训,做出能简单循迹的小车,可以看这个速通版。
全程引导篇
是讲了做出能够完赛的智能车的整个过程,大部分文章只是简单点拨一下,但是附上了相关的文章链接,方便根据自己的情况深入了解。
全程引导篇,能够带你比较系统地了解整个智能车的制作过程,推荐备赛初期或者有车模之后学习。
详细讲解篇
是全程引导篇的补充,由于全程引导篇是引导性质,文章内容只是点拨,缺乏相应的原理或代码讲解,因此写详细讲解篇作为补充。
详细讲解篇会渗透在全程引导篇中。
速通版
全程引导篇
详细讲解篇
智能车模块详解——数据存储与读写(eeprom/flash)
(更新中)

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 14
14 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)