AIAAJ | 西工大常宝辉、李楠等:基于径向基函数神经网络的激波串数据驱动控制方法研究
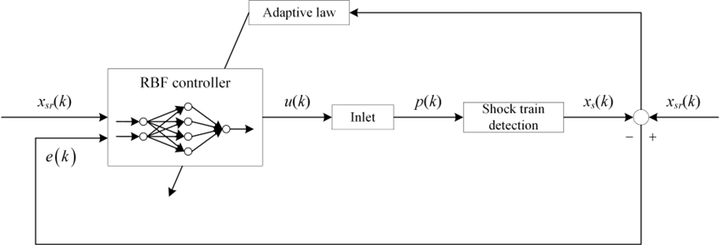
本文采用基于RBF-NN的数据驱动控制方法,打破了传统依赖数学模型进行控制律设计的局限性,结合沿程压力波动的标准差特征进行激波串位置识别并反馈,并通过RBF-NN控制器实时调节隔离段截流装置实现激波串的控制。激波串控制系统的示意图如图3所示,控制器的输入为给定的激波串位置指令(xsr)与误差(指令与实际激波串位置的差值(e)),输出为下游节流板的角度(u),用以模拟背压的变化,背压变化后导致进气道
基于径向基函数神经网络的激波串数据驱动控制方法研究
Data-Driven Control of Shock Train Using Radial Basis Function Neural Network
常宝辉1,2,3 李楠1,2,3*姜路野4 张伟伟1,2,3
1.西北工业大学航空学院,西安 710072
2.西北工业大学流体力学智能化国际联合研究所,西安 710072
3.飞行器基础布局全国重点实验室,西安 710072
4.清华大学航天航空学院,北京100084

引用格式:Baohui Chang, Nan Li, Luye Jiang, Weiwei Zhang. Data-Driven Control of Shock Train Using Radial Basis Function Neural Network[J]. AIAA Journal, 2025. https://doi.org/10.2514/1. J064762
编者按
高超声速进气道/隔离段内激波诱导流动具有时变、非线性等复杂特征,难以建立准确的数学模型,从而为控制律的设计带来了显著挑战。本研究采用基于径向基函数神经网络(RBF-NN)的数据驱动方法,利用神经网络根据激波串位置偏差直接生成控制输入(如截流面积比)。基于简化的进气道/隔离段模型对该控制方法进行了实验验证,结果表明,在时变来流及不同内收缩比条件下,基于RBF-NN的控制方法能够对激波串位置实现有效控制。该方法为高超声速进气道/隔离段内复杂流动的闭环控制提供了新范式。
1 研究背景
超燃冲压发动机在运行过程中,隔离段内的激波串通常位于其入口附近,以确保发动机达到最佳推力性能。然而,由于来流条件和下游燃烧状态的波动,激波串容易受到干扰并移出隔离段入口,从而导致进气道不起动甚至是发动机熄火。通过实时监测激波串位置,并结合下游反压调节的反馈控制策略,可以有效抑制外界干扰的影响,实现发动机性能与进气系统稳定性之间的平衡。
控制律根据激波串位置偏差,通过算法实时生成控制输入(本文中为截流面积比),调节下游背压,从而形成闭环反馈控制。其设计直接影响系统的响应速度、跟踪精度及抗干扰稳定性。在传统控制律设计中往往需要先获得能准确描述激波串特性的数学模型,受时变来流以及复杂几何等因素影响,激波串的低阶模型获取较为困难;此外,传统比例-积分-微分(PID)控制方法仍是线性的,很难适用于具有时变、非线性特征的复杂流动场景。
本文采用基于RBF-NN的数据驱动控制方法,打破了传统依赖数学模型进行控制律设计的局限性,结合沿程压力波动的标准差特征进行激波串位置识别并反馈,并通过RBF-NN控制器实时调节隔离段截流装置实现激波串的控制。在Ma=4.2条件下基于简化进气道/隔离段模型对该控制方法进行了验证,结果表明基于RBF-NN的控制方法可在时变来流条件以及不同内收缩比条件下对激波串位置进行有效控制。
2 激波串位置监测
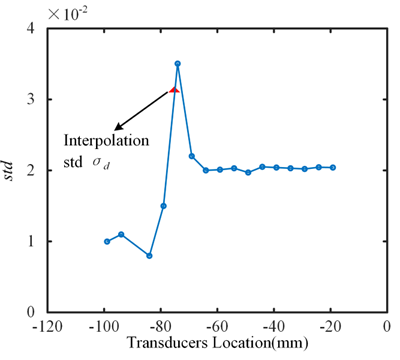
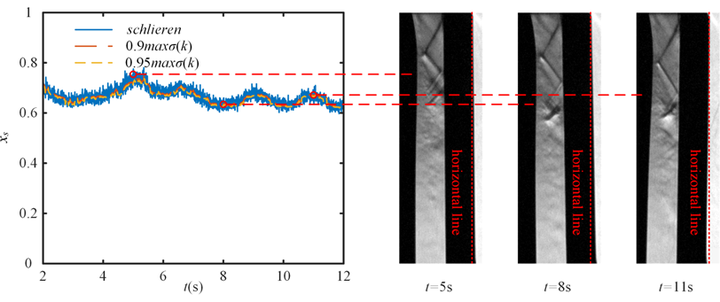
进气道内存在复杂的反射激波,这些反射激波所造成的压升与激波串的初始压升类似,在时变来流条件下会对激波串位置的识别造成干扰。本文采用基于沿程压力脉动标准差的方法来识别激波串前缘激波位置,其原理如图1所示。采用阈值σd对沿程压力脉动标准差插值从而得到激波串位置,其中阈值σd的选择只需要基于少量隔离段纹影图像进行比对即可获得,不同阈值选择的激波串位置识别结果如图2所示。
3 控制律设计
激波串控制系统的示意图如图3所示,控制器的输入为给定的激波串位置指令(xsr)与误差(指令与实际激波串位置的差值(e)),输出为下游节流板的角度(u),用以模拟背压的变化,背压变化后导致进气道内压力发生改变,通过激波串位置监测方法得到实际的激波串位置,并将其反馈给控制器。
4 控制结果
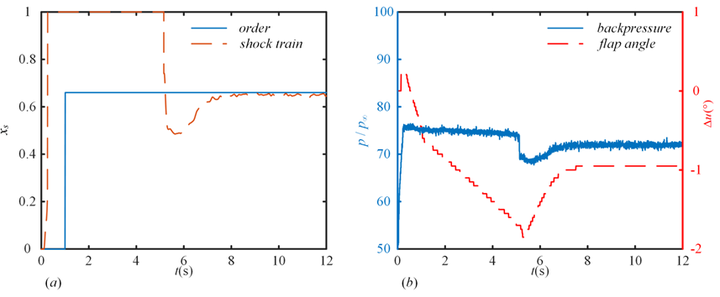
当背压足够大时,激波串就会被推出进气道入口,导致不起动。不起动发生后,RBF-NN控制系统可以自适应的调节背压的变化使得进气道再起动,不起动-再起动的控制过程如图4所示。
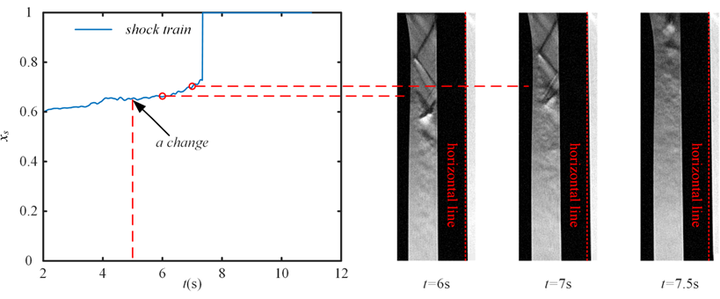
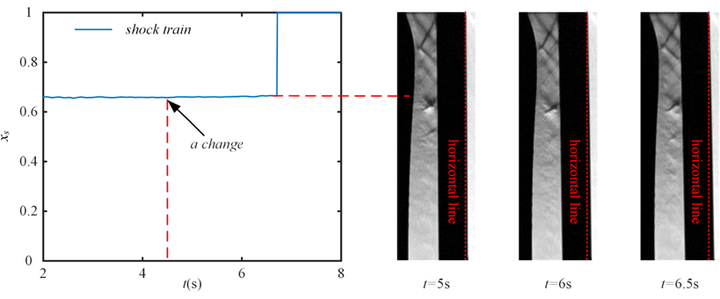
在时变攻角条件下对该控制方法进行了验证,为了更好地观察控制效果,激波串初始位置位于进气道不起动边界,攻角变化范围为-1.2°~1.2°,变化频率为0.1 Hz,不同内收缩比条件下未施加控制的效果如图5和图6所示。喉道高度为13 mm和11 mm的情况下,当攻角开始变化后,激波串持续前移,最终被推出入口。
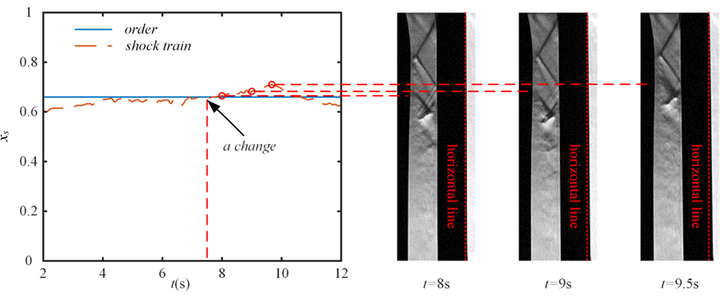
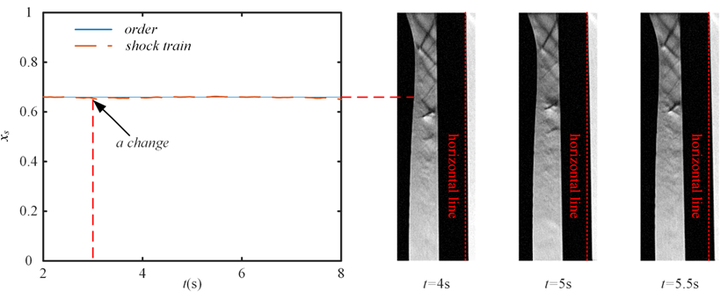
施加控制时,激波串运动轨迹如图7和图8所示。当喉道高度为13 mm时,受攻角变化影响,激波串首先越过指令位置,随后控制系统又将其调节至安全范围;当喉道高度为11 mm时,受喉道下游顺压力梯度的辅助影响,激波串始终处于指令位置附近。
5 结论
本研究所提出的基于RBF-NN的控制方法为进气道/隔离段复杂流动控制律设计提供了指导。该方法显著提升了控制律设计的效率,突破了传统设计方法对被控对象准确数学模型的高度依赖,展现出较强的泛化能力,从而进一步增强了隔离段激波串控制在工程实践中的应用潜力。
原文链接:
AIAAJ | 西工大常宝辉、李楠等:基于径向基函数神经网络的激波串数据驱动控制方法研究
注:本文由论文原作者整理并投稿分享,获作者授权发布。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 0
0 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

所有评论(0)