TVA动态调节帧率与曝光抑制运动模糊
重磅预告:本专栏将独家连载系列丛书《智能体视觉技术与应用》部分精华内容,该书是世界首套系统阐述“因式智能体”视觉理论与实践的专著,特邀美国 TypeOne 公司首席科学家、斯坦福大学博士 Bohan 担任技术顾问。Bohan先生师从美国三院院士、“AI教母”李飞飞教授,学术引用量在近四年内突破万次,是全球AI与机器人视觉领域的标杆性人物(www.type-one.com)。
重磅预告:本专栏将独家连载系列丛书《智能体视觉技术与应用》部分精华内容,该书是世界首套系统阐述“因式智能体”视觉理论与实践的专著,特邀美国 TypeOne 公司首席科学家、斯坦福大学博士 Bohan 担任技术顾问。Bohan先生师从美国三院院士、“AI教母”李飞飞教授,学术引用量在近四年内突破万次,是全球AI与机器人视觉领域的标杆性人物(www.type-one.com)。全书严格遵循“基础—原理—实操—进阶—赋能—未来”的六步进阶逻辑,致力于引入“类人智眼”新范式,系统破解从数字世界到物理世界“最后一公里”的世界级难题。该书精彩内容将优先在本专栏陆续发布,其纸质专著亦将正式出版。敬请关注!
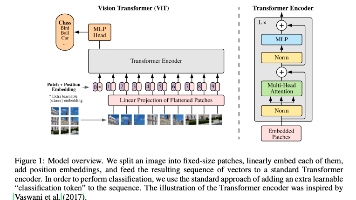
前沿技术背景介绍:AI智能体视觉(TVA,Transformer-based Vision Agent)是依托Transformer架构与“因式智能体”理论所构建的颠覆性工业视觉技术,属于“物理AI” 领域的一种全新技术形态,实现了从“虚拟世界”到“真实世界”的历史性跨越。它区别于传统计算机视觉和常规AI视觉技术,代表了工业智能化转型与视觉检测模式的根本性重构(www.tianyance.cn)。 在实质内涵上,TVA是一种复合概念,是集深度强化学习(DRL)、卷积神经网络(CNN)、因式分解算法(FRA)于一体的系统工程框架,构建了能够“感知-推理-决策-行动-反馈”的迭代运作闭环,完成从“看见”到“看懂”的范式突破,不仅被业界誉为“AI视觉检测专家”,而且也被理解为“具身视觉智能体“,是智能机器人视觉与灵巧运动控制的关键技术支撑。
版权声明:本文系作者原创首发于 CSDN 的技术类文章,受《中华人民共和国著作权法》保护,转载或商用敬请注明出处。
引言:TVA在高速铣削场景下,其动态视觉感知能力面临的核心挑战是运动模糊。传统的固定参数视觉系统在此类场景下极易失效,而TVA通过其动态传感融合硬件集群与智能算法,能够协同配置帧率与曝光时间,将运动模糊从干扰噪声转化为可利用的运动信号,从而实现高精度检测与控制。
一、运动模糊的物理成因与TVA的应对范式转变
在高速铣削中,工件或刀具的线速度可达每秒数米,任何不当的图像采集参数都会导致严重的运动模糊,其物理公式可简化为:模糊像素数 ≈ (物体速度 × 曝光时间) / 像元尺寸。
传统机器视觉(RV)采用静态、固化的硬件参数(如固定低帧率、手动设置曝光),在高速场景下只能通过极力缩短曝光时间来“冻结”运动,但这往往需要极强的瞬时照明,且可能导致图像信噪比严重下降。
TVA则实现了范式转变:它不再将运动模糊视为纯粹的干扰,而是将其部分视为一种包含运动信息的信号。通过动态协同调整帧率、曝光时间,并结合Transformer模型的时空建模能力,TVA既能有效抑制模糊对检测任务的影响,又能从中解码出运动状态,为预测性控制提供依据。其硬件基础是集成全局快门相机、电动变焦镜头、高频可控光源及六轴姿态传感器的动态集群,为参数动态调整提供了物理可能。
二、帧率与曝光时间协同配置的核心原理与方法
协同配置的目标是在满足图像质量(信噪比、清晰度) 和系统实时性(延迟) 的前提下,最大化运动信息的有效捕获。下表概括了协同配置的策略矩阵:
| 场景特征与目标 | 核心策略 | 帧率 (FPS) 配置原则 | 曝光时间配置原则 | 辅助技术/协同措施 |
|---|---|---|---|---|
| 超高速切削, 目标:绝对“冻结”运动 | 极短曝光优先 | 高帧率 (≥500 FPS)。确保在极短曝光下仍有足够的数据吞吐率,避免丢帧,为后续时序分析提供连续帧。 | 极短 (≤10 μs)。直接根据模糊像素数公式计算,将模糊控制在亚像素级别。需配合超高亮度脉冲光源(如激光光源)在曝光瞬间提供照明。 |
1. 光源同步频闪:光源仅在相机曝光瞬间以脉冲形式点亮,等效于进一步缩短“有效”曝光时间。 2. 全局快门相机:消除卷帘快门在高速场景下产生的畸变。 |
| 中高速切削, 目标:平衡清晰度与信噪比 | 自适应曝光与帧率匹配 | 中等偏高帧率 (120-300 FPS)。根据物体运动速度自适应调整:速度提升 → 帧率提升,以维持相邻帧间物体的位移在可跟踪范围内。 | 自适应调整 (几十μs至几ms)。采用运动自适应曝光算法:实时估计场景中的运动速度(可通过前几帧或IMU数据),动态计算并设置不产生显著模糊的最大允许曝光时间,以获取最佳信噪比图像。 | 1. 多传感器融合:结合六轴姿态传感器数据,预判相机与工件的相对运动趋势,前瞻性调整曝光参数。 2. 硬件触发与同步:使用编码器触发相机,确保在工件运动到固定相位时采集,提高一致性。 |
| 复杂运动(变速、振动), 目标:抑制模糊并解码运动 | “模糊即信号”协同处理 | 高且稳定的帧率。提供高时间分辨率的图像序列,是后续利用Transformer进行时空建模和动态模糊复原的基础。 | 不追求绝对最短,而是保持一致性或按模式调整。允许一定程度的、可控的模糊,因为模糊的方向和程度编码了瞬时速度信息。 | 1. TVA时空Transformer模型:利用其长序列依赖建模能力,将连续多帧带有运动模糊的图像作为输入,通过注意力机制分离场景静态结构与运动轨迹,实现模糊复原与运动估计联合优化。 2. 事件相机辅助:在极端场景下,可融合事件相机数据。事件相机响应微秒级亮度变化,无曝光时间概念,能提供额外的超高速运动边缘信息,辅助帧相机进行图像重建。 |
三、配置实践:代码示例与参数调优流程
以下是一个简化的Python伪代码示例,展示TVA系统如何根据实时反馈动态协同调整帧率与曝光时间。
# 伪代码:TVA高速铣削场景动态采集参数控制器
import numpy as np
from some_hardware_lib import Camera, LightController, IMUSensor
class DynamicAcquisitionController:
def __init__(self, camera: Camera, light: LightController, imu: IMUSensor):
self.cam = camera
self.light = light
self.imu = imu
self.current_speed_estimate = 0.0 # 估计的相对运动速度 (像素/秒)
self.target_blur_pixels = 0.5 # 允许的最大模糊像素数(目标值)
self.pixel_size = 3.45e-6 # 相机像元尺寸 (米)
self.lens_magnification = 1.0 # 镜头放大倍率
def estimate_motion_from_imu_and_images(self, prev_frame, curr_frame):
"""融合IMU数据和图像光流,估计瞬时运动速度"""
# 1. 从IMU获取相机自身的角速度和线加速度(若相机安装在机械手上)
angular_vel, linear_acc = self.imu.get_latest_data()
# 2. 计算图像光流(稀疏或稠密)
flow = calculate_optical_flow(prev_frame, curr_frame)
# 3. 融合估计出工件相对于相机的速度(简化示例)
# (实际中需进行坐标转换和传感器融合滤波,如卡尔曼滤波)
estimated_speed_pixel_per_sec = np.percentile(np.abs(flow), 95) * self.cam.frame_rate
return estimated_speed_pixel_per_sec
def calculate_optimal_exposure(self, speed_pixel_per_sec):
"""根据运动速度计算最优曝光时间"""
# 核心公式:曝光时间 = (目标模糊像素 * 像元尺寸) / (物体速度 / 放大倍率)
# 注意单位转换:速度从 像素/秒 转换为 米/秒(在物方空间)
speed_object_space = speed_pixel_per_sec * self.pixel_size / self.lens_magnification
if speed_object_space < 1e-6: # 避免除零
speed_object_space = 1e-6
optimal_exposure = (self.target_blur_pixels * self.pixel_size) / speed_object_space
# 限制在相机支持的曝光范围
optimal_exposure = np.clip(optimal_exposure, 10e-6, 10e-3) # 10μs 到 10ms
return optimal_exposure
def adjust_frame_rate_based_on_exposure(self, new_exposure):
"""根据新的曝光时间,调整帧率以避免重叠并匹配处理能力"""
# 原则:帧周期 >= 曝光时间 + 读出时间 + 处理余量
readout_time = self.cam.get_readout_time()
processing_margin = 2e-3 # 2ms 处理余量
min_frame_interval = new_exposure + readout_time + processing_margin
new_frame_rate = 1.0 / min_frame_interval
# 同时,帧率不能超过上游算法实时处理的能力上限(例如,模型推理频率)
max_supported_fps = 200 # 根据边缘算力设定
new_frame_rate = min(new_frame_rate, max_supported_fps)
return new_frame_rate
def run_adaptive_control_loop(self):
"""主控制循环"""
prev_frame = self.cam.capture()
while True:
curr_frame = self.cam.capture()
# 1. 估计当前运动速度
self.current_speed_estimate = self.estimate_motion_from_imu_and_images(prev_frame, curr_frame)
# 2. 计算最优曝光时间
new_exposure = self.calculate_optimal_exposure(self.current_speed_estimate)
# 3. 计算适配的帧率
new_frame_rate = self.adjust_frame_rate_based_on_exposure(new_exposure)
# 4. 下发新参数到硬件(需硬件支持动态调整)
self.cam.set_exposure(new_exposure)
self.cam.set_frame_rate(new_frame_rate)
# 5. 同步控制光源为脉冲模式,并与新曝光时间同步
self.light.set_mode('pulse')
self.light.set_pulse_width(new_exposure * 0.9) # 脉宽略短于曝光时间
self.light.sync_to_camera_trigger()
prev_frame = curr_frame
# 循环继续...
# 初始化硬件与控制器
camera = Camera(model="全局快门CMOS", interface="10GigE")
light = LightController(type="高频LED线光")
imu = IMUSensor()
controller = DynamicAcquisitionController(camera, light, imu)
# 启动自适应控制循环
controller.run_adaptive_control_loop()
关键调优流程与验证方法:
- 基线建立:在机床静止和已知匀速运动状态下,测试不同曝光-帧率组合下的图像模糊程度(使用清晰度评价函数如Laplacian梯度)和信噪比(SNR)。
- 动态标定:让机床执行典型的加工程序(包含变速、换向),记录TVA自适应调整的参数日志,并与实际拍摄的图像质量进行对比分析,验证控制算法的有效性。
- 端到端验证:在自适应参数配置下,运行完整的TVA检测任务(如刀具崩刃识别、工件尺寸测量),以最终任务的准确率和召回率作为协同配置是否成功的黄金标准,而不仅仅是图像的视觉清晰度。
- 极限测试:在机床最高设计转速和进给速度下运行,确保系统仍能通过参数调整(可能结合算法层的动态模糊复原)维持可接受的检测性能。
写在最后——以TVA重构工业视觉的理论内涵与能力边界
TVA在高速铣削场景下抑制运动模糊,绝非简单地将曝光时间调到最短,而是通过**“感知-决策-执行”的智能闭环**:利用多传感器实时感知运动状态,动态计算并协同设置帧率与曝光时间,在硬件层面最大化信息捕获质量;同时,在算法层面利用Transformer的时空建模能力,对残余的或有意保留的模糊进行解码与复原。这种软硬件协同的主动式策略,是TVA突破传统视觉在高速动态场景中瓶颈的核心。
参考来源

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 0
0 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)