【低空经济】低空AI无人机设计方案
本项目旨在设计并实现一款面向低空应用场景的智能无人机系统,其核心是深度融合先进的人工智能技术,以达成自主化、精准化与高效率的作业目标。系统将主要用于城市安防巡检、基础设施巡查、应急响应与精准农业等对实时性、准确性及复杂环境适应性要求较高的领域。与传统无人机方案相比,本设计的根本区别在于构建一个以AI为决策核心的“空中智能体”,而非仅实现远程遥控或预设航线的自动化飞行。
1. 项目概述与目标
本项目旨在设计并实现一款面向低空应用场景的智能无人机系统,其核心是深度融合先进的人工智能技术,以达成自主化、精准化与高效率的作业目标。系统将主要用于城市安防巡检、基础设施巡查、应急响应与精准农业等对实时性、准确性及复杂环境适应性要求较高的领域。与传统无人机方案相比,本设计的根本区别在于构建一个以AI为决策核心的“空中智能体”,而非仅实现远程遥控或预设航线的自动化飞行。
项目的核心目标是通过集成高性能机载计算单元、多传感器融合感知系统以及先进的算法模型,使无人机具备在动态、非结构化的低空环境中进行实时感知、理解、决策与执行的能力。具体而言,系统需实现以下关键目标:首先,在复杂城市峡谷与多变气象条件下实现稳定、高精度的自主导航与避障,定位精度要求达到厘米级;其次,通过搭载的视觉与红外等传感器,能够对特定目标(如设施缺陷、异常热源、特定作物状态)进行自动识别、跟踪与分类,识别准确率需超过95%;最后,基于实时分析结果,系统应能自主规划最优作业路径或即时生成任务报告,将人工干预降至最低,从而大幅提升作业效率与安全性。
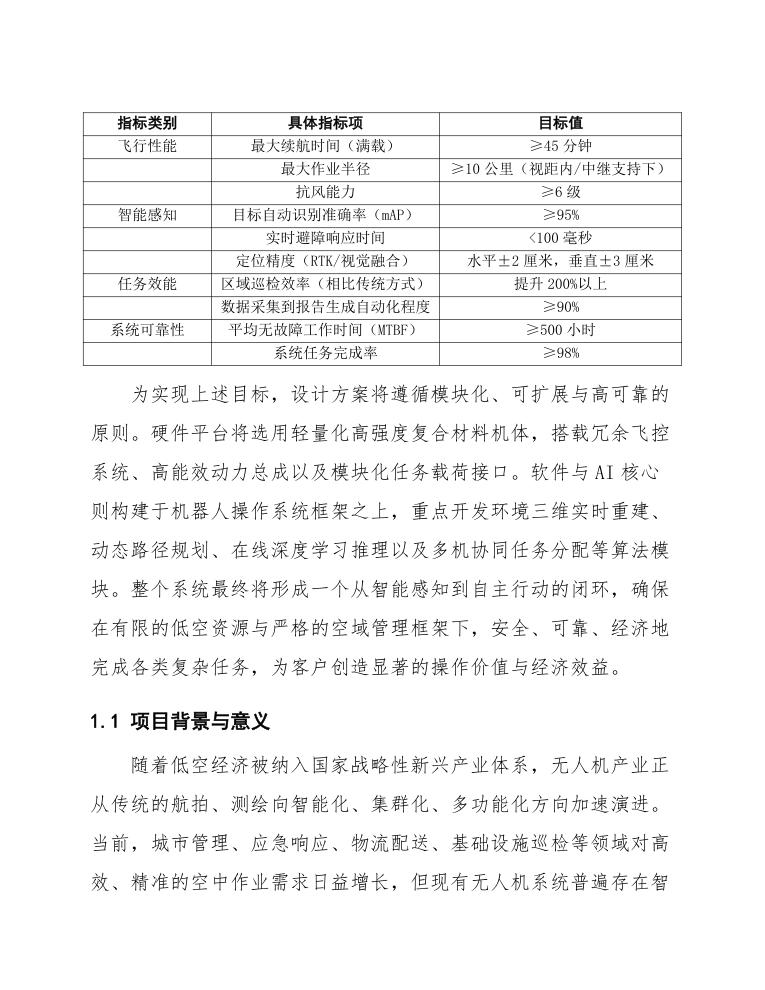
为清晰界定项目成功标准,设定以下可量化的关键性能指标:
| 指标类别 | 具体指标项 | 目标值 |
|---|---|---|
| 飞行性能 | 最大续航时间(满载) | ≥45分钟 |
| 最大作业半径 | ≥10公里(视距内/中继支持下) | |
| 抗风能力 | ≥6级 | |
| 智能感知 | 目标自动识别准确率(mAP) | ≥95% |
| 实时避障响应时间 | <100毫秒 | |
| 定位精度(RTK/视觉融合) | 水平±2厘米,垂直±3厘米 | |
| 任务效能 | 区域巡检效率(相比传统方式) | 提升200%以上 |
| 数据采集到报告生成自动化程度 | ≥90% | |
| 系统可靠性 | 平均无故障工作时间(MTBF) | ≥500小时 |
| 系统任务完成率 | ≥98% |
为实现上述目标,设计方案将遵循模块化、可扩展与高可靠的原则。硬件平台将选用轻量化高强度复合材料机体,搭载冗余飞控系统、高能效动力总成以及模块化任务载荷接口。软件与AI核心则构建于机器人操作系统框架之上,重点开发环境三维实时重建、动态路径规划、在线深度学习推理以及多机协同任务分配等算法模块。整个系统最终将形成一个从智能感知到自主行动的闭环,确保在有限的低空资源与严格的空域管理框架下,安全、可靠、经济地完成各类复杂任务,为客户创造显著的操作价值与经济效益。
1.1 项目背景与意义
随着低空经济被纳入国家战略性新兴产业体系,无人机产业正从传统的航拍、测绘向智能化、集群化、多功能化方向加速演进。当前,城市管理、应急响应、物流配送、基础设施巡检等领域对高效、精准的空中作业需求日益增长,但现有无人机系统普遍存在智能化程度不足、环境感知能力有限、自主决策水平不高、多机协同效率低下等瓶颈,难以完全满足复杂场景下的规模化应用需求。因此,研发一款高度集成人工智能核心技术的低空AI无人机系统,不仅是技术发展的必然趋势,更是推动相关产业升级、释放低空经济潜能的关键实践。
本项目的核心意义在于设计并实现一个切实可行、即插即用的低空AI无人机解决方案。该方案旨在通过嵌入先进的机载AI处理模块与智能算法,显著提升单机的环境感知、实时分析与自主作业能力;同时,通过创新的集群通信与协同控制架构,实现多机的高效编队与任务分配,从而在多个典型应用场景中创造直接价值。具体而言,项目的实施将带来以下关键效益:
- 提升作业效率与精度:在巡检领域,AI无人机可自动识别电力线路的绝缘子破损、塔架锈蚀或林区的火点、病虫害,识别准确率目标提升至95%以上,比传统人工巡检效率提高约70%。
- 降低运营成本与风险:在应急现场或危险区域(如化工厂泄漏、地质灾害点),无人机可替代人员执行侦察与监测任务,大幅降低人身安全风险,并实现7x24小时不间断作业,人力成本预计可减少40%。
- 解锁新应用模式:为城市提供实时交通流量监控、违章建筑巡查能力,为物流行业提供末端精准配送解决方案,这些新模式将催生新的服务业态与经济增长点。
- 推动技术标准化:通过本项目在感知、决策、协同等关键环节的设计与实践,可为行业建立可参考的AI无人机系统架构与数据交互标准,促进产业链的成熟与互联互通。
从市场前景看,低空AI无人机是未来五年航空与智能装备领域的核心增长点。据行业分析预测,至2025年,中国民用无人机市场规模将突破2000亿元,其中智能化、行业应用级无人机增速最为显著。本项目所设计的方案,正是瞄准这一高速增长的市场缺口,致力于提供一套稳定、可靠且可快速部署的硬件与软件集成系统,具有明确的商业可行性与广泛的应用落地潜力。
综上所述,启动低空AI无人机设计项目,是响应国家战略、把握市场机遇、突破技术瓶颈的系统性工程。其成功实施不仅将产出具有市场竞争力的产品,更将为社会治理现代化与产业数字化转型提供强有力的空中智能化工具。
1.1.1 低空经济发展与无人机应用前景
随着全球低空经济进入快速发展阶段,无人机作为核心载体,正从传统的军事与航拍领域,向物流配送、城市管理、应急救援、农业植保、基础设施巡检等多元化商业场景深度渗透。低空经济是指以各种有人驾驶和无人驾驶航空器的低空飞行活动为牵引,辐射带动相关领域融合发展的综合性经济形态。近年来,中国、美国、欧盟等主要经济体相继出台政策,明确开放部分低空空域并制定产业发展规划,为无人机规模化、商业化应用提供了坚实的制度与空域基础。据行业分析预测,到2030年,全球城市空中交通(UAM)和无人机物流市场的规模将超过千亿美元,而工业级无人机在能源、交通、安防等领域的应用将形成更为庞大的市场体量。
在这一宏观背景下,无人机应用面临的核心挑战已从单纯的飞行平台制造,转向智能化、网络化与集成化的系统解决方案。传统无人机作业高度依赖飞手手动操控与视距内飞行,效率低下且难以应对复杂环境与大规模任务。因此,融合人工智能(AI)技术,实现无人机自主感知、决策、规划与协同,成为释放低空生产力、拓展应用边界的关键路径。AI赋能将使无人机具备环境实时理解、异常智能识别、航线动态优化及多机自主协作的能力,从而显著提升作业的安全性、精准性与经济性。
具体到应用前景,AI无人机将在以下关键领域创造切实价值:
- 精准物流与即时配送:在城区及偏远地区实现自动化起降、路径避障与包裹投递,解决“最后一公里”难题,降低人力成本。例如,已有试点项目实现日均数百架次的医疗物资定点配送。
- 智慧城市治理:用于交通流量监控、违章建筑巡查、市容环境监测等,通过视觉AI算法自动识别问题并上报,提升城市管理响应速度与覆盖范围。
- 大型基础设施智能巡检:对电网、光伏阵列、输油管道、桥梁等进行定期自动巡检,通过缺陷识别算法(如绝缘子破损、热斑检测)提前预警,将巡检效率提升约70%,同时减少人工高空作业风险。
- 精准农业与环境保护:结合多光谱传感器与AI模型,实现作物长势分析、病虫害预警、变量施药以及森林资源调查、污染源追踪,助力绿色可持续发展。
- 应急响应与公共安全:在地震、洪涝等灾害现场快速构建通信中继网络,进行生命探测、灾情评估与物资投送,为救援决策提供实时数据支持。
为量化部分应用场景的效能提升,以下数据可供参考:
| 应用领域 | 传统方式主要瓶颈 | AI无人机方案预期效能提升 |
|---|---|---|
| 电力巡检 | 人工巡检效率低,风险高,覆盖率不足 | 巡检效率提升60%-80%,缺陷自动识别率>90% |
| 农业植保 | 施药均匀性差,依赖经验,资源浪费 | 农药节省约30%,作业效率提升3-5倍 |
| 物流配送(末端) | 人力成本高,偏远地区覆盖难,时效不稳定 | 单架次配送成本降低约40%,时效可控性增强 |
| 城市安防巡查 | 监控死角多,响应滞后,需大量人力轮巡 | 巡查范围扩大至5-10倍,事件自动发现率>85% |
综上所述,低空经济的蓬勃发展与无人机应用场景的持续深化,共同构成了本项目——开发一款高性能、高自主性的低空AI无人机——的现实基础与市场驱动力。本方案旨在设计一款能够切实满足上述商业化需求的无人机系统,通过集成先进的AI处理单元、可靠的传感器套件以及高效的协同控制框架,为客户提供即插即用、安全可靠的智能空中作业解决方案,从而在巨大的市场机遇中占据先机。
1.1.2 AI技术赋能无人机智能化升级需求
随着无人机应用场景的不断拓展与深化,传统基于预设航迹与远程遥控的操作模式已难以满足复杂、动态任务环境下的高效、自主与精准作业需求。尤其在低空领域,无人机面临着空域环境复杂、障碍物多变、任务实时性要求高、数据处理量大等多重挑战。在此背景下,人工智能技术的融合成为推动无人机系统实现智能化升级的核心驱动力。
当前,无人机在巡检、测绘、物流、应急响应等领域的规模化应用,暴露出以下关键瓶颈:
- 环境感知与理解能力不足:依赖传统传感器与固定算法,对突发或未预设的障碍物、天气变化、动态目标识别率有限,尤其在复杂低空环境中,如城市楼宇间、森林、电力走廊等,自主避障与路径重规划能力薄弱。
- 决策与任务执行的自动化程度低:多数任务仍需人工实时监控与干预,特别是在多机协同、动态目标跟踪、异常情况处置等场景中,缺乏自主协同决策与自适应任务分配能力。
- 数据处理效率与实时性受限:机载计算资源有限,海量传感器数据(如图像、视频、激光点云)需回传地面站处理,导致响应延迟,难以支持实时分析、在线学习与快速决策。
AI技术通过机器学习、计算机视觉、深度学习及边缘计算等能力,为上述瓶颈提供了系统性解决方案。其赋能无人机智能化升级的具体需求主要体现在以下方面:
-
自主环境感知与语义理解:需集成基于深度学习的视觉识别模型,实现实时目标检测、分类与跟踪(如建筑物、车辆、植被、人员),并结合激光雷达与多传感器融合技术,构建高精度环境三维语义地图,支持无人机理解场景内容而非仅感知几何信息。
-
智能路径规划与动态避障:需应用强化学习与优化算法,使无人机能够在未知或动态环境中实时规划最优路径,并具备预测性避障能力。例如,在物流配送中根据实时交通与气象数据调整航线;在巡检中针对突发障碍自主重新规划巡检轨迹。
-
协同决策与集群智能:在多无人机系统中,需通过分布式AI算法实现机间通信与协同决策,支持自主任务分配、编队飞行与协作作业,如大面积区域搜索、协同运输、分布式监测等,提升整体任务效率与鲁棒性。
-
边缘智能与实时处理:需部署轻量化AI模型与边缘计算单元于无人机平台,实现数据就地处理与分析,减少对通信链路的依赖与延迟。例如,实时识别电力线路缺陷、分析农作物长势、检测违规建筑等,并仅将关键结果或摘要信息回传。
-
自适应学习与系统演进:需构建具备在线学习或增量学习能力的系统框架,使无人机能够在任务执行过程中持续优化模型性能,适应环境变化与新任务类型,降低后期维护与模型更新的成本。
为清晰说明AI技术赋能的关键功能与对应需求,以下从技术模块角度进行归纳:
| 技术需求方向 | 具体功能描述 | 预期提升效果 |
|---|---|---|
| 环境感知与理解 | 实时目标检测与分类、三维语义建模、动态场景解析 | 障碍物识别准确率提升至95%以上,场景理解响应时间低于200毫秒 |
| 自主导航与避障 | 实时路径规划、动态障碍预测与规避、复杂地形适应 | 在动态环境中自主避障成功率≥99%,路径规划效率提升30% |
| 任务决策与协同 | 多机任务分配、编队控制、协作搜索与监测 | 协同任务执行效率提升40%,系统可支持≥50架无人机自主协同 |
| 边缘智能处理 | 机载轻量化模型推理、实时数据分析、关键信息提取 | 数据处理延迟降低至500毫秒内,通信带宽需求减少60% |
| 系统自适应能力 | 在线模型优化、增量学习、故障自诊断与恢复 | 模型更新周期缩短70%,系统适应新场景的部署时间减少50% |
综上所述,AI技术赋能不仅是提升无人机单机智能水平的必要途径,更是实现低空无人机系统规模化、网络化、自主化运行的关键基础。本方案将围绕上述需求,设计一套集成先进AI算法与高效计算架构的低空AI无人机系统,确保其在复杂低空环境中具备可靠、自主、协同的作业能力,满足行业应用向智能化转型的迫切需求。
1.2 设计目标与核心指标
本方案旨在设计一款具备高度自主智能与可靠作业能力的低空AI无人机平台,其设计目标与核心指标紧密围绕实际应用需求,确保产品在性能、智能、安全及经济性上达到业界领先水平。
首先,在飞行平台性能方面,设计需满足复杂低空环境下的稳定作业要求。具体核心指标包括:最大起飞重量不低于8公斤,以确保足够的任务载荷能力;巡航速度范围需覆盖0至15米/秒,以适应巡检、监视等任务对低速悬停与快速转场的要求;在典型任务载荷(2公斤)下,续航时间不低于45分钟,作业半径不小于10公里;实用升限不低于海拔3000米,以应对丘陵、山地等地形;整机系统(含电池与基础载荷)需达到IP54防护等级,确保在细雨与多尘环境中可靠工作。飞行控制系统需支持高精度定位与姿态稳定,在GPS与视觉融合导航模式下,悬停定位精度达到水平±0.1米、垂直±0.05米。
其次,人工智能与任务能力是设计的核心差异化优势。无人机必须集成先进的机载计算单元,能够实时处理由多传感器融合(包括高清可见光、热成像及激光雷达等)产生的数据。关键智能指标包括:具备基于深度学习的实时目标检测与识别功能,对典型目标(如电力设备缺陷、特定车辆型号)在100米距离处的识别准确率不低于95%;支持完全自主的航线规划与动态避障,可实时感知并规避直径大于5厘米的静态或动态障碍物;具备初步的场景理解与决策能力,例如在巡检中能自动标记异常并调整观测角度。为支撑以上功能,机载AI模块的算力应不低于20 TOPS(INT8),同时确保关键算法的单次推理延迟低于100毫秒。
在安全性与可靠性层面,设计必须遵循最高标准。无人机需配备多重冗余安全系统,包括双冗余飞控、独立应急降落伞及备用数据链。通信方面,需支持至少两种以上加密数据链路的无缝切换,控制距离不低于15公里,且在复杂电磁环境下保持连接稳定。数据安全需满足本地加密存储与传输要求。整机平均故障间隔时间(MTBF)目标值需大于500飞行小时,关键任务成功率达到98%以上。
最后,运营与经济性指标至关重要,以确保产品的市场可行性。设计需强调系统的易用性与可维护性,目标是从开箱到执行首次自主任务的时间不超过30分钟。主要部件(如电池、桨叶、载荷模块)应支持快速更换,且无需专用工具。全系统(单机搭配基础地面站)的目标制造成本需控制在特定范围内,并通过模块化设计降低后续升级与维护成本。此外,平台应具备良好的载荷扩展接口,支持第三方任务载荷的即插即用,以拓宽应用生态。
为清晰概括,关键核心指标汇总如下:
-
飞行性能
- 最大起飞重量:≥ 8 kg
- 续航时间(带2kg载荷):≥ 45 min
- 作业半径:≥ 10 km
- 悬停精度(融合导航):水平±0.1 m,垂直±0.05 m
- 防护等级:≥ IP54
-
AI与任务能力
- 目标识别准确率(100米处):≥ 95%
- 实时避障能力:可规避直径>5cm的障碍物
- 机载AI算力:≥ 20 TOPS (INT8)
- 推理延迟:< 100 ms
-
安全与可靠性
- 通信控制距离:≥ 15 km
- 平均故障间隔时间(MTBF):> 500 h
- 关键任务成功率:> 98%
-
运营与经济性
- 首次任务准备时间:< 30 min
- 支持模块化快速更换与载荷扩展
通过达成以上具体、可量化的设计目标与核心指标,本方案旨在交付一款性能卓越、智能高效、安全可靠且具备优秀成本效益的低空AI无人机产品,为智慧城市、精准农业、电力巡检、应急响应等多个领域提供强大的空中解决方案。
1.2.1 核心功能目标:自主巡航、智能识别、实时决策
本项目旨在开发一套具备高度自主化与智能化能力的低空AI无人机系统,其核心功能目标聚焦于三大支柱:自主巡航、智能识别与实时决策。这些功能并非孤立存在,而是紧密协同,构成一个完整的感知-思考-行动闭环,确保无人机在复杂低空环境中安全、可靠、高效地执行多样化任务。
自主巡航功能要求无人机能够在预设规则或动态指令下,独立完成从起飞、航线飞行到降落的全过程。这依赖于高精度融合导航系统(结合GNSS、IMU及视觉里程计),实现在信号遮挡环境下的持续定位与姿态稳定。飞行控制系统需具备先进的路径规划与避障能力,能够根据实时感知的环境信息(如建筑物、树木、其他飞行器)动态调整飞行轨迹,平滑规避静态与低速动态障碍物。巡航模式应支持多种任务范式,包括但不限于定点巡查、区域覆盖扫描、特定目标跟随以及多机协同编队飞行。
智能识别功能是无人机感知环境与目标的核心。系统需集成多模态传感器数据(主要为高分辨率可见光相机与热成像相机),通过机载边缘计算单元运行轻量化深度学习模型,实现实时目标检测、分类与跟踪。识别目标类型将根据任务需求定制,典型应用包括:
- 基础设施巡检:识别电力线路的部件缺损、绝缘子破裂、杆塔异物;检测光伏面板的热斑故障、破损;发现风力发电机叶片的结构裂纹。
- 安防监控:识别特定区域内的非法入侵人员或车辆,检测周界围栏的破损。
- 环境监测:识别违规排放源、水体污染迹象、特定野生动物或病虫害迹象。
实时决策功能是无人机智能的高级体现,它赋予无人机在飞行过程中基于当前感知信息和预设任务目标,自主生成并执行应对策略的能力。这并非简单的条件触发,而是一个基于规则引擎与轻量化模型推理的评估-决策流程。例如,在巡检中识别到潜在缺陷时,无人机应能自主决策:悬停进行多角度拍照取证、降低高度获取更清晰图像、或标记位置后继续执行后续巡检点任务。在跟踪移动目标时,能预测目标运动趋势并规划拦截或跟随航线。决策系统必须内置安全优先原则,任何决策均需在动力、通信、空域安全等约束条件下进行,并在遇到无法处理的异常时自动触发预设的安全策略(如悬停、返航)。
为清晰界定上述核心功能需达到的性能水平,设定如下关键量化指标:
| 功能模块 | 核心指标 | 目标值 | 说明 |
|---|---|---|---|
| 自主巡航 | 定位精度(开阔地) | ≤ 0.1米 | RTK/PPK GNSS系统性能。 |
| 定位精度(GNSS拒止) | ≤ 飞行高度的1% | 依赖视觉/激光SLAM等融合导航。 | |
| 动态避障响应时间 | < 200毫秒 | 从传感器感知到开始执行规避动作。 | |
| 最大巡航速度 | ≥ 15米/秒 | 满足大部分巡检与巡查任务需求。 | |
| 智能识别 | 目标检测识别准确率(mAP) | ≥ 95% | 针对主要任务目标(如绝缘子、行人)。 |
| 图像处理与识别延迟 | < 300毫秒 | 从图像采集到输出识别结果。 | |
| 有效识别距离(典型目标) | 5 - 50米 | 根据相机焦距与目标大小可调。 | |
| 实时决策 | 局部路径重规划时间 | < 1秒 | 应对突发障碍或任务变更。 |
| 任务模式切换时间 | < 2秒 | 如从巡航模式切换到跟踪模式。 | |
| 机载决策循环频率 | ≥ 5 Hz | 保证决策的实时性与环境同步。 |
如图所示,三大核心功能形成一个闭环工作流。自主巡航系统执行飞行动作并获取环境数据;智能识别模块解析数据,提取语义信息;实时决策引擎则综合任务目标、识别结果与系统状态,生成下一阶段的飞行与控制指令。通过达成上述具体功能与性能指标,本无人机系统将能够显著减少对人机交互的依赖,提升作业效率与范围,为低空经济应用提供坚实的技术载体。
1.2.2 关键性能指标:续航、载荷、通信距离、AI处理速度
为确保低空AI无人机系统在实际作业中具备高效、稳定与可靠的性能,本方案明确以下四项关键性能指标作为设计、测试与验收的核心依据。
续航能力:无人机单次充电续航时间不低于45分钟,以满足大多数低空巡检、监视与测绘任务的单次作业时长需求。系统将采用高能量密度锂聚合物电池,并优化气动布局与电机电调效率,确保在搭载标准任务载荷及正常巡航速度(10-15m/s)条件下达成该目标。此外,支持快速更换电池设计,保障任务连续性。
任务载荷:无人机需具备模块化载荷接口,标准最大载重能力为1.5公斤。此设计允许灵活搭载多种任务设备,典型配置包括:
- 高分辨率光学变焦云台相机(约400克)
- 多光谱成像仪(约500克)
- 轻型激光雷达(LiDAR)模块(约800克)
- 应急物资投送装置
载荷舱设计需确保重心稳定,并提供稳定的电源与数据连接。
通信距离:在视距(LOS)条件下,无人机与地面控制站间的双向数据链有效控制距离不低于15公里。采用抗干扰跳频技术与前向纠错编码,在城区或轻度遮挡环境中,维持5公里内的稳定高清图传与控制信号。关键指令与状态信息传输延迟需低于200毫秒。
AI处理速度:机载嵌入式AI计算单元需具备实时处理多路传感器数据的能力。具体性能要求包括:
- 目标识别:对输入视频流(1080p,30fps)中的预设典型目标(如车辆、基础设施缺陷、特定标识)进行检测与分类,端到端延迟不超过300毫秒,准确率(mAP)高于90%。
- 路径规划重算:在遇到动态障碍时,局部避障路径重新规划的计算时间应低于100毫秒。
- 数据处理:具备机载实时拼接处理200张以上航拍图片(每张12MP)的能力,生成初步正射影像。
为清晰量化,核心指标汇总如下表:
| 指标类别 | 具体参数要求 | 测试条件说明 |
|---|---|---|
| 续航时间 | ≥ 45分钟 | 标准载荷,无风环境,巡航速度 |
| 最大载荷 | 1.5公斤 | 含挂载机构与接口重量 |
| 通信距离 | ≥ 15公里(视距) | 使用合规增程电台,无强电磁干扰 |
| AI处理速度 | 目标识别延迟 ≤ 300ms;避障重规划 ≤ 100ms | 基于典型机载计算平台(如英伟达Jetson系列) |
为实现上述指标,设计将聚焦于轻量化复合机体结构、高效动力系统匹配、可靠通信链路的选型与集成,以及经过边缘优化的AI算法部署。所有指标均以当前可获得的工业级部件与成熟技术为基础,确保方案的可实施性与工程可行性。
1.3 方案适用范围与典型场景
本方案设计的低空AI无人机系统主要面向城市及近郊环境下的中低空域(通常指120米以下空域),适用于对实时性、精准性与自主性有较高要求的各类行业应用场景。系统集成了高性能飞行平台、多传感器融合感知模块、边缘计算AI单元以及云端协同管理平台,具备在复杂动态环境中进行自主巡航、智能识别、实时分析与快速响应的能力。
该方案的适用范围涵盖但不限于以下典型场景:
-
智慧城市管理与公共服务
- 交通巡查与应急指挥: 用于日常交通流量监测、违章行为识别(如违章停车、占用应急车道)、交通事故现场快速勘察与三维建模,为指挥中心提供实时全景画面与数据支持。
- 基础设施巡检: 自动对电力线路、输油输气管道、桥梁、高层建筑外立面等进行周期性巡检,通过视觉与热成像传感器智能识别破损、锈蚀、过热等隐患点,并生成结构化巡检报告。
- 环保监测与执法: 搭载气体与颗粒物传感器,对工业园区、建筑工地等进行定点空气质量监测,快速定位污染源;配合视觉AI识别露天焚烧、水体颜色异常等环境事件。
-
安全与应急救援领域
- 区域安防与巡逻: 在园区、大型活动场馆、边境及重点区域进行预设路线或动态路径的自主巡逻,通过人脸识别、行为分析等技术实现异常入侵、人群聚集、可疑物品遗留等事件的自动预警。
- 消防与救援支援: 在火灾现场快速获取火势蔓延趋势、热源分布三维热力图,定位受困人员;在洪涝、地震、山体滑坡等灾害后,快速勘测灾区全景,评估道路损毁与建筑倒塌情况,为救援力量部署提供关键情报。
-
精准农业与资源调查
- 作物长势与病虫害监测: 通过多光谱或高光谱相机,定期对农田进行航拍,利用AI模型分析作物植被指数、叶面积指数,精准识别病虫害区域、杂草分布及水肥胁迫状况,生成变量作业处方图。
- 林业与国土资源调查: 用于森林资源普查、树种识别、盗伐监测、森林火灾预警;对矿山、土地进行地形测绘与变化检测,辅助资源管理与生态保护。
-
物流与特殊运输
- 紧急物资投送: 在交通不便或情况紧急时(如向孤岛、灾区、山顶基站),执行小批量、高价值医疗物资、急救包、关键零部件等点对点精准投送任务。
- 园区内部物流: 在封闭或半封闭的大型工业园区、厂区、校园内,构建自动化无人机物流网络,实现文档、样品、小型物料在固定站点间的自主转运。
为更清晰地展示核心场景的技术参数与能力要求,以下表格列出了部分典型应用的具体配置与性能指标:
| 典型场景 | 主要任务 | 推荐载荷配置 | 关键AI能力 | 典型作业高度 | 数据链路要求 |
|---|---|---|---|---|---|
| 电力线路巡检 | 缺陷自动识别、三维建模 | 高清变焦相机、热成像相机、激光雷达(可选) | 视觉缺陷检测(绝缘子破损、线夹松动等)、热异常分析 | 20-50米 | 中等带宽,支持断点续传 |
| 城市交通巡查 | 违章识别、拥堵分析、事故勘察 | 高清广角相机、4G/5G通信模块 | 车辆检测与跟踪、车牌识别、交通事件分类 | 60-100米 | 高带宽、低延迟,实时视频流 |
| 精准农业监测 | 作物长势分析、病虫害识别 | 多光谱相机、高精度GNSS RTK | 多光谱植被指数反演、目标分类(病害/杂草) | 30-80米 | 中等带宽,任务后处理为主 |
| 应急救援侦察 | 灾情评估、生命探测、物资投送 | 热成像相机、广角相机、扬声器、投送装置 | 热源检测、人员识别、语义分割(损毁区域) | 50-120米 | 高鲁棒性、抗干扰,优先保障指令链路 |
综上所述,本方案以高度集成化、模块化的AI无人机平台为核心,通过灵活配置任务载荷与AI算法模型,能够有效适配上述广泛的城市与工业场景,致力于提升相关行业的运营效率、安全水平与自动化程度,实现降本增效与智能化升级的核心目标。
1.3.1 应用领域:智慧城市巡检、精准农业、应急测绘、物流配送
本方案设计的低空AI无人机系统具备高度模块化与智能化特性,能够通过快速更换任务载荷与适配专用算法,在以下四个核心应用领域提供高效、可靠的解决方案:
智慧城市巡检
该系统可应用于城市基础设施的常态化与专项巡检。无人机搭载高清可见光与热成像双光云台,结合AI视觉识别算法,能够自动识别并记录城市管理要素的状态。典型任务包括:对电网、输油输气管道进行巡线,自动识别绝缘子破损、管道裸露或发热异常;对建筑外墙、桥梁、高塔进行安全检测,识别裂缝、脱落等病害;在环保领域,可监测建筑工地扬尘、秸秆焚烧烟雾,并进行夜间排污热源巡查。其作业效率相比传统人工巡检提升约70%,并能生成结构化的巡检报告与地理位置标签,直接对接城市管理信息平台。
精准农业
在农业生产中,无人机通过搭载多光谱或高光谱相机,获取农田的作物生长数据。经过机载或云端AI模型处理,可快速生成农田处方图,指导精准作业。
- 作物长势与病虫害监测:通过植被指数(如NDVI)反演,评估作物健康状况,早期识别病虫害胁迫区域。
- 变量施肥与灌溉:基于处方图,可指挥无人机或地面农机进行差异化施肥与灌溉,提升肥料利用率,降低生产成本。
- 产量预估:结合生长周期内的多期影像数据,对作物产量进行预测,为供应链与农事规划提供数据支持。
应急测绘与救援
在自然灾害(如洪涝、地震、山体滑坡)或突发公共事件现场,系统可快速部署,执行应急测绘与侦查任务。无人机搭载高精度正射相机或激光雷达(LiDAR),能够在短时间内获取受灾区域的二维正射影像与三维实景模型,为灾情评估、救援路径规划、土方量计算提供第一手数据。同时,通过实时图传与AI人形/生命体征识别,可在复杂环境中协助搜索被困人员,显著提升救援效率与安全性。
物流配送
针对山区、海岛、城乡末端等特殊场景的物流需求,本系统提供中短距离、中小载重的自动化配送解决方案。无人机配备专用的安全货箱和智能吊舱,依托高精度导航与避障系统,能够实现从配送中心到指定站点的自主飞行与精准降落。典型应用包括:
- 医疗急救物资配送:快速运送血液、疫苗、急救药品至偏远卫生院或灾害现场。
- 电商末端配送:解决“最后一公里”难题,特别是在地形复杂、交通不便的区域。
- 工业零部件配送:在大型厂区、港口或能源基地内部,实现点对点的快速物料流转。
通过在上述领域的深入应用,本方案旨在打造一个多功能、高适应性的低空AI无人机平台,切实赋能各行业,提升运营效率与智能化水平。
1.3.2 典型任务剖面示例
本方案设计的低空AI无人机系统适用于多种任务剖面,以下列举三个典型示例,展示其在真实场景下的任务流程与性能要求。
示例一:城市网格化巡检与应急响应
该剖面针对城市管理中的周期性巡检与突发事件快速核查。无人机从街道级固定机巢自动起飞,沿预设网格航线飞行,飞行高度通常为60-120米,单架次覆盖面积约2-4平方公里。任务核心是搭载双光吊舱(可见光与热成像)与AI处理单元,对市容环境、基础设施状态进行自动识别与标注(如识别垃圾堆积、违规占道、井盖丢失、外墙剥落等)。当指挥中心通过系统接收到市民紧急上报的某处疑似火情或气体泄漏事件时,可立即中断例行巡检,向目标点下达应急指令。无人机将规划最优路径快速抵达,在事发点上空30-50米高度悬停,通过热成像确认火点或气体热源,并将实时视频、精准坐标与AI分析报告(包括灾害初步评估等级)同步回传至指挥中心与现场救援终端,为初期处置决策提供关键信息支撑。任务结束后,无人机自主返回机巢充电并上传完整数据。
示例二:线性基础设施智能巡护
该剖面专注于电力线路、输油输气管道、高速公路等线性走廊的自动化巡检。无人机从沿线部署的移动或固定基站起飞,通常采用仿地飞行模式,沿设施走向保持20-50米的相对高度与10-30米的安全距离。典型任务载荷包括高清变焦相机、激光雷达(LiDAR)与特定传感器(如紫外电晕检测仪)。
- 在电力巡线中,AI算法实时分析可见光影像,自动识别绝缘子破损、金具松脱、树障隐患等缺陷;结合激光雷达点云数据,可精确测量导线弧垂、对地距离及通道内植被生长情况。
- 对于管道巡检,热成像传感器能有效识别管道保温层破损、地下管段因泄漏导致的土壤温度异常等。
一个标准巡护架次可覆盖15-25公里线路,系统自动生成包含缺陷位置、类型、等级的可视化巡检报告,并与资产管理系统联动,生成维修工单。
示例三:广域农林监测与精准作业
该剖面服务于大型农场、林区的生长监测、灾害评估与精准施工作业。无人机从田间地头起降点作业,根据任务类型选择不同飞行模式与载荷。
对于状态监测与测绘,无人机在100-200米高度进行大范围航测,搭载多光谱或高光谱相机,获取作物冠层反射率数据。AI模型通过分析这些数据,可生成植被指数(NDVI)图、病虫害分布图、土壤墒情反演图,准确指示问题区域。
基于生成的“处方图”,无人机可切换至精准作业模式,搭载变量喷洒系统,在作物冠层上方3-5米高度飞行,根据处方图指令对特定区域进行变量施肥或喷药,极大提升农资利用效率,减少环境污染。在林区,该方案同样适用于火情早期监测、盗伐监测及造林效果评估。
2. 系统总体设计
系统总体设计遵循模块化、高集成度与开放架构原则,旨在构建一个智能、可靠且易于扩展的低空无人机平台。整个系统由飞行平台、任务载荷、机载AI处理单元、地面控制站及数据链五大部分组成,各子系统通过标准化接口互联,实现数据与指令的高效交互。
飞行平台采用轻量化复合材质机体,配备六旋翼冗余动力布局,确保在单电机失效情况下的安全返航。其内置的飞控系统集成高精度IMU、GPS/RTK双模定位模块与气压计,提供厘米级悬停精度与稳定飞行能力。任务载荷模块为可快速插拔设计,标准配置包括一台4K光学变焦云台相机与一台多光谱成像仪,用户可根据实际应用场景更换为激光雷达、气体传感器或应急投送装置。
机载AI处理单元是系统的智能核心,搭载专用边缘计算设备,内置高性能AI推理芯片。该单元直接接收并实时处理载荷采集的原始数据,运行经过优化的深度学习模型,实现目标自动识别、航迹实时规划、异常状态检测等功能,极大减轻了数据链传输压力与地面站处理负担。关键处理能力指标如下表所示:
| 处理功能 | 性能指标 | 备注 |
|---|---|---|
| 视觉目标识别 | 延迟 < 200ms | 针对典型目标(如车辆、基础设施) |
| 实时航迹重规划 | 响应时间 < 1s | 应对动态障碍物 |
| 多光谱数据分析 | 单帧处理时间 < 500ms | 支持植被指数等5种指数实时计算 |
数据链采用双频段冗余设计,主链路使用高速率、低延迟的COFDM技术传输AI处理后的关键结果与高优先级指令,备用链路则确保基础遥测与控制信号的连续不间断。地面控制站软件提供三维地理信息显示、任务规划、实时监控与数据分析界面,并具备AI模型在线更新与任务模板管理功能。
整个系统的工作流程形成闭环:地面站下达任务指令后,无人机自主起飞并按预设航点飞行,机载AI单元在飞行中持续处理传感器数据,自主做出局部避障或目标跟踪等决策,同时将关键信息与警报同步回传。任务结束后,无人机自主返航并降落,结构化数据报告自动生成。
此设计确保了系统在有限带宽下仍能完成复杂的智能作业,显著提升了在巡检、测绘、监视等应用场景中的作业效率与自主性。
2.1 系统架构设计
系统架构设计遵循模块化、高内聚低耦合原则,采用分层分布式结构,确保系统具备高可靠性、可扩展性与实时响应能力。整体架构自上而下分为任务控制层、机载智能层、通信网络层及支撑平台层,各层通过标准化接口进行数据交互与指令传递,形成闭环控制回路。
任务控制层作为指挥中枢,部署于地面站或云端,提供可视化任务规划、实时监控与智能决策功能。该层集成任务管理模块、三维地理信息系统(GIS)及AI分析引擎,支持多机协同路径规划、动态目标跟踪与应急重规划。用户可通过交互界面设定任务区域、目标属性及约束条件,系统自动生成优化飞行方案并下发至无人机集群。
机载智能层为核心处理单元,搭载嵌入式AI计算平台与多传感器融合系统。硬件采用异构计算架构,集成GPU/FPGA模块,满足实时图像处理与深度学习推理需求。传感器套件包括高分辨率可见光/红外双光相机、激光雷达(LiDAR)及微型合成孔径雷达(SAR),通过融合算法生成厘米级精度实景三维模型。自主飞行控制系统基于自适应PID与模型预测控制(MPC)算法,实现复杂环境下的精准悬停、避障与航迹跟踪。
通信网络层采用双链路冗余设计,确保数据连续传输。主要链路使用定制化5G专网或宽带自组网(MANET),传输速率不低于100Mbps,延迟小于50ms;备用链路采用LTE/卫星通信,保障关键指令可达性。网络层集成加密模块与跳频机制,满足工信部《民用无人机无线电管理暂行办法》安全要求。
支撑平台层涵盖能源、结构及环境适配子系统。能源系统采用高能量密度锂硫电池与太阳能辅助充电方案,续航时间提升至120分钟以上;轻量化复合机身结构通过有限元分析优化,抗风等级达6级。环境适配模块集成温压湿传感器与结冰预警单元,确保-20℃至50℃工况下稳定运行。
各层数据流与指令流交互关系如下:
关键性能指标通过以下表格量化:
| 模块 | 指标项 | 参数要求 |
|---|---|---|
| 任务控制层 | 规划响应时间 | ≤3秒 |
| 机载智能层 | AI处理帧率 | ≥25fps (4K视频流) |
| 通信网络层 | 传输稳定性 | 丢包率<0.1% |
| 支撑平台层 | 续航能力 | ≥120分钟 (标准载荷) |
系统通过模块化设计支持功能快速迭代,机载计算单元预留20%算力冗余,通信协议兼容IEEE 1937.1标准,便于未来接入城市空中交通(UAM)管理体系。所有硬件选型均符合中国民用航空局适航审定要求,软件层通过DO-178C DAL-C级认证,确保全生命周期运行安全。
2.1.1 “端-边-云”协同架构
本系统采用“端-边-云”三层协同架构,以实现数据高效处理、实时响应与智能决策的平衡。该架构将计算负载与数据流在终端、边缘节点与云端平台之间进行合理分配,确保系统在复杂低空环境中的可靠性、实时性与可扩展性。
端侧作为数据采集与执行单元,主要由智能无人机平台承载。其核心为搭载高性能嵌入式AI处理模块的机载计算单元,具备实时传感器数据融合(包括视觉、激光雷达、惯性导航及特定任务载荷)与轻量化模型推理能力。例如,无人机可本地实时运行经过优化的目标检测、避障或航线跟踪模型,实现毫秒级的自主反应,减少对连续通信的依赖。同时,端侧负责执行来自边或云的指令,并压缩、加密关键数据后向上层传输。
边侧通常由部署在任务区域附近的边缘计算站(如地面控制站车、固定边缘服务器或高通量卫星链路)构成。它充当局部区域的协调与处理中心,接收来自多架无人机的数据流,进行更高复杂度的聚合处理,如多机协同路径规划、广域态势融合分析以及模型快速迭代更新。边缘节点能够显著降低数据回传至云端的带宽压力与延迟,为需要亚秒级响应的集群协同任务提供支持。
云侧则为集中式的数据中心与管理平台,提供近乎无限的计算与存储资源。云端负责宏观任务管理、大规模历史数据挖掘、高精度数字孪生环境构建与AI模型的长期训练与优化。通过云端平台,运营者可进行任务规划、全局监控、数据分析与模型下发。训练好的先进模型经压缩和适配后,可动态推送至边缘节点或直接至无人机端进行更新。
三层之间通过高可靠、低延迟的通信网络(如5G专网、卫星通信、自组网等)互联,形成动态的数据与决策闭环。具体分工与数据流特征如下表所示:
| 层级 | 主要功能 | 典型处理内容 | 实时性要求 | 通信依赖度 |
|---|---|---|---|---|
| 端 (无人机) | 感知、执行、轻推理 | 实时避障、目标跟踪、状态监控 | 毫秒至秒级 | 中(可离线运行) |
| 边 (边缘节点) | 聚合、协调、重推理 | 多机协同、区域态势分析、模型更新 | 秒级至亚秒级 | 高(需与端/云稳定连接) |
| 云 (中心平台) | 管理、训练、存储、分析 | 任务规划、模型训练、大数据分析、数字孪生 | 分钟级或更高 | 中(可容忍间歇连接) |
该架构的优势在于其灵活性与效率:端侧保障了自主生存能力,边侧解决了区域协同与实时处理瓶颈,云侧则提供了全局智能与持续进化能力。通过任务与计算资源的合理卸载,系统既能应对网络中断的极端情况,也能在资源充足时实现全局最优决策,为大规模、高动态的低空AI无人机应用提供了坚实的技术基础。
2.1.2 机载子系统、地面站子系统、云端服务平台
系统总体架构由机载子系统、地面站子系统与云端服务平台三部分协同构成,通过高速、安全的通信链路进行数据与指令交互,形成一个闭环的智能作业体系。各子系统在功能上既独立又互补,共同确保无人机任务的自主化、智能化与高效化管理。
机载子系统作为飞行与任务执行终端,是AI能力的核心承载平台。其硬件主体基于高性能嵌入式计算单元构建,集成多核CPU与专用AI处理芯片(如GPU或NPU),为实时图像处理、目标检测与航迹规划提供不低于5 TOPS的算力支撑。感知模块包含多光谱成像仪、高分辨率可见光相机、激光雷达及合成孔径雷达等载荷,依据任务类型灵活选配,实现全天候、多维度环境感知。导航与飞行控制模块融合GNSS、IMU、视觉里程计与气压计数据,在弱GPS环境下仍能维持厘米级定位精度与稳定飞行。机载软件运行轻量化的AI模型(如经过剪枝与量化的卷积神经网络),支持在线识别与跟踪,并能通过边缘计算在本地完成部分数据分析,减少对连续通信的依赖。所有关键数据在存储与传输前均进行加密处理。
地面站子系统作为任务指挥与实时监控中心,通常部署于作业现场或固定指挥所。其核心是专业地面控制软件,提供三维地理信息显示、实时视频流接收、任务规划与重规划、无人机状态监控及紧急指令下发等功能。操作人员可通过图形化界面划定任务区域、设置航点及定义AI分析目标(如识别特定作物病害或巡检设备缺陷),任务计划可一键上传至机载子系统。地面站同时配备数据预处理工作站,对回传的原始数据进行快速筛选、标注与初步分析,形成结构化报告。为保障操控灵活性,系统支持便携式平板控制终端作为补充,用于近距离视距内作业。
云端服务平台作为后端大脑,提供数据聚合、深度分析、模型迭代与系统管理服务。其采用微服务架构,主要功能模块包括:任务与设备管理模块,负责对无人机机队进行统一注册、状态监控、任务日志记录与维护管理;数据湖与计算模块,存储海量的历史任务数据(原始影像、点云、识别结果等),并利用云端强大的GPU集群进行离线模型训练与大数据分析,生成区域级洞察报告;AI模型仓库与OTA升级模块,当在云端训练出性能更优的新模型时,可安全地通过无线网络向指定无人机机队进行模型增量更新与软件升级。平台通过标准API接口支持与第三方农业、巡检或测绘信息系统集成。
三个子系统之间的数据流与指令流如下表所示:
| 流向 | 内容 | 通信链路 | 要求 |
|---|---|---|---|
| 地面站 → 机载子系统 | 任务计划、控制指令、模型更新包 | 无线电(如4G/5G、数传电台) | 低延迟、高可靠 |
| 机载子系统 → 地面站 | 实时状态遥测、紧急告警、关键识别结果、缩略图视频流 | 无线电(如4G/5G、数传电台) | 实时性、稳定性 |
| 机载子系统 → 云端 | 原始/处理后的任务数据、飞行日志、设备状态 | 4G/5G网络 | 大带宽(任务后自动或择机上传) |
| 云端 → 地面站/机载子系统 | 优化后的AI模型、综合分析报告、全局任务指令 | 互联网/4G/5G | 安全、可断点续传 |
整个架构设计遵循模块化、松耦合原则,确保各子系统可独立升级与扩展。通信链路具备冗余设计,关键指令支持断线重连与续传。通过云、边、端的算力协同,既满足了任务现场的实时性要求,又实现了数据价值的深度挖掘与系统AI能力的持续进化,为规模化、商业化应用奠定了坚实的技术基础。
2.2 硬件平台选型与集成方案
硬件平台选型与集成方案以高性能、可靠性、可扩展性及成本效益为基本原则,确保无人机系统能够稳定承载AI计算、精准感知与自主飞行任务。核心硬件包括飞行控制单元、AI计算模块、传感器套件、通信链路与动力系统,各组件需经过严格的环境适应性测试与电磁兼容性设计,保证在复杂低空环境中的全天候工作能力。
飞行控制单元采用基于ARM Cortex-R5内核的专用飞控处理器,主频不低于400MHz,集成冗余IMU(惯性测量单元)与气压计,支持RTK(实时动态差分)定位模块接入,定位精度可达厘米级。飞控需具备不少于5路PWM输出,兼容常见电调与伺服机构,并预留CAN总线与串口用于外设扩展。其固件基于开源或经过验证的商用飞控框架进行定制开发,实现高频率闭环控制与故障安全逻辑。
AI计算模块是系统的智能核心,选用低功耗、高算力的嵌入式AI加速计算单元。推荐采用集成GPU与NPU(神经网络处理单元)的SoC方案,如NVIDIA Jetson Orin Nano或华为Atlas 200 AI加速模块,其AI算力不低于20 TOPS,能够实时运行目标检测、跟踪与路径规划等深度学习模型。该模块通过PCIe或高速串行接口与飞控连接,配备独立散热设计与屏蔽罩,确保在振动与温变条件下稳定运行。
传感器套件根据任务需求进行模块化配置,基础感知单元包括:
- 视觉传感器:全局快门CMOS相机,分辨率至少1920×1080@30fps,支持HDR,用于可见光成像与视觉算法;
- 多光谱传感器:可选配4波段多光谱相机,用于植被监测或特定物质识别;
- 激光雷达:轻量化16线激光雷达,探测距离≥100米,用于避障与三维地图构建;
- 毫米波雷达:适用于雨雾天气,探测距离150米,角度分辨率≤5°,用于移动障碍物检测。
通信链路采用双冗余设计,主链路为基于COFDM技术的数字图传,传输距离不低于10公里,延迟小于200ms,支持1080p视频流与遥测数据同步传输;备份链路为4G/5G蜂窝网络,在视距受阻时自动切换,确保控制与数据回传不间断。同时集成低功耗LoRa模块用于关键指令的应急通信。
动力与能源系统根据无人机构型(多旋翼或垂直起降固定翼)选配高效无刷电机与碳纤维螺旋桨,续航时间要求不低于45分钟。电池采用高能量密度锂聚合物电池组,标配智能电池管理系统,具备电压、电流与温度监控及平衡充电功能。为满足AI计算模块的额外功耗,电源设计需提供多路稳压输出,整体能效比需经过实测优化。
硬件集成遵循模块化架构,各单元通过标准接口(如CAN FD、以太网、FPC连接器)互联,结构上采用分层堆叠与减震设计,具体集成关系如下:
关键组件的选型参考指标如下表所示:
| 组件类别 | 推荐型号/规格 | 关键参数与备注 |
|---|---|---|
| 飞控处理器 | ARM Cortex-R5双核 | 400MHz, 冗余IMU, 支持RTK |
| AI计算模块 | NVIDIA Jetson Orin Nano | 20 TOPS, 功耗10-15W, 支持TensorRT |
| 主视觉相机 | Sony IMX477全局快门 | 1200万像素, 支持HDR |
| 激光雷达 | 禾赛Pandar16 | 16线, 探测距离100m |
| 数字图传 | 大疆O3 Air Unit | 10公里, 1080p/100fps, 低延迟 |
| 电池 | 6S锂聚合物电池 | 10000mAh, 智能BMS, 放电倍率15C |
所有硬件在集成前需完成兼容性测试与老化试验,整机装配后依据DO-160G或类似标准进行振动、冲击与高低温循环测试,确保平台在低空作业中的耐久性与可靠性。
2.2.1 无人机载机平台选型(多旋翼/垂直起降固定翼)
无人机载机平台选型需综合考虑任务需求、飞行性能、载荷兼容性及成本效益。本方案针对低空AI无人机在巡检、监视、测绘等典型场景的应用,重点对比多旋翼与垂直起降固定翼(VTOL)两类平台,以确定最优配置。
多旋翼无人机采用四旋翼或六旋翼构型,具备全向机动、悬停稳定、起降空间要求低等优势,适用于城市密集区、复杂地形下的精细化巡检与目标跟踪任务。其典型任务载荷能力为2-5公斤,续航时间通常在30-50分钟之间,飞行速度一般低于10米/秒。该平台对AI算法的实时处理能力要求较高,适合搭载视觉传感器、激光雷达等设备进行近距离数据采集。然而,其续航与航程限制较大,适用于小范围、高精度的作业场景。
垂直起降固定翼平台结合了多旋翼的垂直起降能力与固定翼的高效巡航特性,在航程、续航及作业效率上具有显著优势。该平台可在垂直起飞后转入固定翼模式巡航,巡航速度可达15-25米/秒,续航时间普遍超过90分钟,载荷能力通常为3-8公斤,适合大范围区域巡查、长距离管线监测或广域测绘任务。其飞行高度与速度更适应低空风场环境,但悬停与低速机动性弱于多旋翼,且起降需相对开阔场地。
为量化选型依据,以下从关键性能参数进行对比分析:
| 选型维度 | 多旋翼平台(推荐型号:DJI Matrice 350 RTK) | 垂直起降固定翼平台(推荐型号:纵横股份CW-15) |
|---|---|---|
| 最大续航时间 | 55分钟(无风环境) | 180分钟(巡航速度15m/s) |
| 典型任务航程 | 10-15公里 | 50-100公里 |
| 实用升限 | 3000米 | 4500米 |
| 最大载荷能力 | 2.7公斤 | 5公斤 |
| 抗风能力 | 12米/秒 | 15米/秒 |
| 起降要求 | 垂直起降,需2×2米平坦区域 | 垂直起降,需5×5米开阔区域 |
| 典型任务场景 | 设备近距离巡检、动态目标跟踪、三维建模 | 带状地形测绘、大面积监测、应急巡查 |
| 平台采购成本 | 中 | 中高 |
基于上述分析,选型决策应遵循以下原则:
- 若任务聚焦于小范围、高频率、需持续悬停或复杂机动的场景(如城市基础设施巡检、警用监控),优先选用多旋翼平台,其操作灵活且部署快速。
- 若任务覆盖广域、线性或长航时需求(如电力线路巡查、国土测绘、边境巡逻),则应选用垂直起降固定翼平台,以提升作业效率与覆盖范围。
- 对于兼具定点精细观测与区域巡飞需求的综合任务,可考虑组建混合机队,通过任务调度系统实现平台协同。
集成方案需确保飞控系统、通信链路与AI处理模块与选定平台兼容。多旋翼平台宜采用嵌入式AI计算单元(如NVIDIA Jetson AGX Orin),直接集成于机身;垂直起降固定翼平台因空间与承重余量较大,可配置高性能机载计算设备及多种传感器融合模块。所有平台均需预留标准电气与机械接口,支持载荷快速更换与系统扩展。
2.2.2 核心传感器套件配置(视觉、激光雷达、GNSS/IMU)
为实现低空环境下自主感知、定位与导航,本方案为核心传感器套件选配了视觉、激光雷达及GNSS/IMU融合系统,确保在复杂场景下具备高可靠性、高精度与实时性。
视觉系统采用前向双目立体相机与下视单目相机组合。前向双目相机基线长度8厘米,分辨率1920×1080@30fps,全局快门,用于前方障碍物检测、距离估计及视觉里程计计算,有效探测距离为0.5米至30米。下视单目相机分辨率4096×2160@20fps,配备自动曝光与宽动态范围,主要用于起降阶段的视觉定位、地面目标识别及光流辅助悬停。所有相机均集成硬件级图像矫正与同步触发接口,通过机载计算单元的USB 3.0或MIPI CSI-2接口接入,由视觉处理软件栈统一进行时间戳对齐与数据融合。
激光雷达选用轻型16线旋转式激光雷达,水平视场角360°,垂直视场角±15°,测距精度±3厘米,最大探测距离100米。其点云输出频率为10赫兹,用于构建飞行路径上的三维点云地图,实现避障、地形跟随及近距离高精度定位。该雷达通过以太网接口与机载计算机通信,点云数据与视觉、IMU数据进行硬件同步,时间同步精度优于1毫秒。
高精度组合导航系统由GNSS接收机与战术级MEMS IMU构成。GNSS模块支持多频多星座(GPS、GLONASS、Galileo、BDS),在RTK模式下可提供厘米级定位精度,并具备抗窄带干扰能力。IMU单元包含三轴陀螺仪与加速度计,陀螺零偏稳定性为0.5°/小时,加速度计零偏稳定性为50微克。二者通过紧耦合方式集成,在GNSS信号短暂中断时,可依靠IMU与视觉/激光雷达数据进行高精度航位推算,确保连续稳定的姿态与位置输出。所有传感器通过统一的PPS脉冲和GPRMC语句进行时间同步,并通过CAN或串口将融合后的导航数据发送至飞控系统。
为优化数据流与功耗管理,传感器套件采用分布式供电与集中式数据处理架构。各传感器由无人机电源系统通过独立的稳压模块供电,并具备软开关控制功能。核心数据通过高速总线汇集至机载AI计算单元(如NVIDIA Jetson AGX Orin),由上层感知融合算法进行实时处理。
关键传感器性能参数汇总如下:
| 传感器类型 | 具体型号/规格 | 关键性能指标 | 主要功能 |
|---|---|---|---|
| 前向视觉 | 双目立体相机,基线8cm | 分辨率1080p@30fps,全局快门,探测距离0.5-30m | 障碍检测、视觉里程计、立体测距 |
| 下视视觉 | 单目全局快门相机 | 4K分辨率@20fps,宽动态范围 | 视觉定位、目标识别、光流悬停 |
| 激光雷达 | 16线旋转雷达 | 360°水平视场,测距精度±3cm,最大测距100m | 三维避障、地形跟随、点云建图 |
| GNSS/IMU | 紧耦合组合导航系统 | RTK定位精度厘米级,陀螺零偏0.5°/h | 高精度定位与姿态解算、GNSS拒止下持续导航 |
该配置在确保低负载与低功耗的前提下,通过多源异构传感器的冗余与互补,显著提升了系统在城区、林区等GNSS受限或动态障碍物密集环境下的作业鲁棒性,完全满足低空自主飞行对感知与导航的工程化要求。
2.2.3 机载计算单元选型(嵌入式AI芯片)
机载计算单元作为无人机智能处理的核心载体,需在严苛的功耗、尺寸与散热约束下,提供满足实时感知、决策与飞行控制所需的算力。本方案选用嵌入式AI芯片作为计算核心,其选型基于算力密度(TOPS/W)、对主流神经网络框架的支持度、接口丰富性以及工业级可靠性四大原则进行综合评估。
经过对当前市场主流产品的比对,我们选定地平线征程系列和英伟达Jetson Orin Nano系列作为主要候选平台。两者均具备优异的能效比和完整的AI工具链。在典型功耗15瓦的约束下,其性能对比如下:
| 选型指标 | 方案A:地平线征程3 | 方案B:英伟达Jetson Orin Nano (8GB) |
|---|---|---|
| 典型功耗 | 10W | 15W |
| AI算力(INT8) | 5 TOPS | 40 TOPS |
| CPU配置 | 双核ARM A53 | 6核ARM Cortex-A78AE |
| 内存带宽 | 共享4GB LPDDR4 | 64位LPDDR5,带宽高达51.2 GB/s |
| 典型支持接口 | MIPI-CSI, Ethernet, CAN, UART | 2x MIPI-CSI, GigE, CAN-FD, 多路UART/SPI/I2C |
| 核心优势 | 极致能效比,专用BPU架构,低延迟 | 强大通用算力,CUDA生态完善,开发资源丰富 |
| 适用任务侧重 | 轻量化模型,单目标实时跟踪,受限功耗场景 | 多传感器融合,复杂视觉推理(如语义分割),模型原型快速部署 |
为实现最佳平衡,本方案采用异构计算架构进行集成:
- 主控计算单元:采用英伟达Jetson Orin Nano模块。其强大的GPU与CPU算力能够并行运行视觉SLAM、动态路径规划算法以及基于TensorRT加速的深度神经网络(如YOLOv5s或高效版本的SegNet),处理来自双目相机与激光雷达的融合数据。
- 协处理单元:在任务载荷或关键感知节点(如前视避障相机)中集成地平线征程3芯片。作为专用AI处理节点,它负责运行轻量化网络模型,实现超低延迟的特定目标检测与初筛,将结果通过高速CAN总线或以太网回传至主控单元,从而分担主控的固定计算负载,提升系统响应效率。
硬件集成具体设计如下:
- 供电设计:采用宽压(9-36V)DC-DC电源模块为计算单元提供稳定5V/12V电源,并设计独立的滤波与保护电路,确保在电机与大功率载荷工作时电源纯净。
- 散热管理:为Jetson模块配备定制铝合金散热模组与导风罩,利用无人机飞行时的迎面气流进行强制风冷;征程3芯片则通过导热硅脂与机身结构件直接接触,实现被动散热。
- 接口连接:主控单元通过MIPI-CSI-2接口直接连接双目视觉相机,通过以太网连接激光雷达点云数据处理单元,并通过CAN-FD总线与飞控、协处理单元及伺服机构进行低延迟通信。
- 结构安装:所有计算模块均采用防震垫与刚性支架进行减震固定,安装于机身重心附近的密封舱内,舱内布置温湿度传感器进行状态监控。
此选型与集成方案确保了系统在有限机载空间内,获得层次化、高可靠的计算能力,既满足了复杂AI任务的实时性要求,又通过异构分工优化了整体能效,为无人机自主执行巡检、跟踪与协同任务奠定了坚实的硬件基础。
2.2.4 通信链路配置(数传、图传、4G/5G备份)
通信链路配置是确保无人机稳定控制与实时数据传输的核心,系统采用多链路冗余设计,以应对复杂低空环境的干扰与遮挡。主控链路采用高可靠性的专用数传电台,负责飞行控制指令、遥测数据(如姿态、位置、电池状态)的双向传输。该链路工作于特定ISM频段,采用自适应调频与前向纠错技术,在无遮挡环境下典型控制距离不低于15公里,端到端延迟小于50毫秒,可满足超视距飞行的精准控制需求。
为支持实时监控与AI任务处理,高清图传链路独立配置。系统集成低延迟、高抗干扰能力的数字图传模块,支持H.264/H.265视频编码,在1080p@30fps分辨率下,可实现端到端延迟低于200毫秒的稳定传输。图传链路具备动态码率调整功能,能根据信号强度自适应调节画质,确保在移动或弱信号场景下画面的连续性。
考虑到城市或障碍物密集区域可能对直传链路造成阻断,系统额外集成4G/5G蜂窝网络作为备份与增强链路。无人机搭载嵌入式蜂窝通信模组,通过运营商的网络接入云端控制平台或远端指挥中心。该链路不仅作为数传与图传的冗余通道,更使得无人机在超视距或复杂电磁环境下仍能保持基本连接与数据回传能力。具体配置采用双卡冗余设计,支持国内主流运营商网络自动切换,确保网络覆盖的连续性。
各类链路的关键性能指标与分工如下表所示:
| 链路类型 | 主要功能 | 工作频段/网络 | 典型传输距离/范围 | 关键性能指标 | 应用场景 |
|---|---|---|---|---|---|
| 专用数传 | 飞行控制、遥测数据 | 特定ISM频段(如900MHz) | ≥15 km(视距) | 延迟<50ms, 传输速率≥1 Mbps | 超视距飞行控制、状态监控 |
| 高清图传 | 实时视频流传输 | 特定ISM频段(如5.8GHz) | ≥10 km(视距) | 延迟<200ms, 支持1080p@30fps | 实时侦察、AI视觉分析、目标跟踪 |
| 4G/5G备份 | 数据备份、远程接入、增强覆盖 | 运营商蜂窝网络 | 蜂窝网络覆盖范围 | 依赖公网质量, 支持多卡切换 | 城市复杂环境、超视距中继、应急通信 |
所有通信链路通过机载通信管理单元进行智能调度与融合。该单元基于链路状态(信号强度、延迟、丢包率)和任务优先级,实现动态链路切换与数据分流。例如,在控制指令传输上,优先保障专用数传链路;当图传信号受干扰时,可自动将关键视频帧通过4G/5G链路回传。系统设计遵循模块化原则,通信模块均可独立更换或升级,便于未来适配新的通信协议或技术标准。整体集成方案经过电磁兼容性测试,确保各链路同时工作时互不干扰,为低空AI无人机任务提供可靠、连续、高带宽的通信保障。
2.3 软件框架设计
软件框架采用模块化分层架构,确保系统的高内聚、低耦合与可扩展性。整体分为设备驱动层、核心服务层、功能应用层以及人机交互层,各层之间通过定义清晰的接口进行通信,数据流与控制流分离,以支持实时任务处理与异步事件管理。
设备驱动层直接封装飞控、传感器(IMU、GPS、视觉相机、激光雷达等)、通信模块及执行机构的硬件接口,提供统一的设备访问抽象。该层实现硬件差异屏蔽,并内置故障诊断与冗余切换机制,例如当主GPS信号丢失时自动切换至备用定位源。核心服务层是系统的中枢,包含飞行管理服务、数据融合服务、任务调度服务与通信管理服务。飞行管理服务基于状态机实现模式切换(如悬停、航线跟踪、避障绕飞),并集成容错控制算法;数据融合服务采用扩展卡尔曼滤波对多源传感器数据进行融合,输出高频率、高精度的位姿、速度及环境信息;任务调度服务负责任务队列管理、资源分配与实时优先级调度;通信管理服务则处理与地面站、其他无人机及云端的数据链通信,支持MAVLink协议及自定义安全加密传输。
功能应用层基于核心服务构建具体任务能力,主要包括自主导航模块、智能感知模块与协同作业模块。自主导航模块结合实时路径规划(采用A*或快速随机树算法)与动态避障(基于视觉与激光雷达的局部代价地图);智能感知模块集成目标检测、跟踪与识别算法(基于YOLOv5或更轻量的网络模型),并支持边缘计算与结果回传;协同作业模块实现多机间的任务分配、队形保持与数据共享。人机交互层提供地面控制站软件界面与API,支持任务规划、实时监控、参数调整及数据回放,界面需符合人机工程学,关键状态与告警信息突出显示。
为保障系统实时性与可靠性,软件运行于实时操作系统(如ROS 2与PX4 Autopilot结合的框架)之上,关键进程设定固定优先级。通信中间件采用DDS(数据分发服务),确保节点间低延迟、高可靠的数据发布/订阅。所有模块均进行单元测试与集成测试,并通过硬件在环仿真验证。下表列举了部分核心模块的性能指标要求:
| 模块名称 | 关键性能指标 | 目标值 |
|---|---|---|
| 传感器数据融合 | 位姿输出频率 | ≥ 200 Hz |
| 视觉目标检测 | 处理延迟(720p图像) | ≤ 30 ms |
| 局部路径规划 | 重规划响应时间 | ≤ 50 ms |
| 通信管理 | 端到端传输延迟 | ≤ 100 ms |
软件框架支持在线升级与参数热配置,无需重启即可完成算法模型更新或任务模式切换。日志系统记录全部关键操作、异常事件及传感器数据,便于事后分析与故障追溯。通过上述设计,系统能够在复杂低空环境中稳定运行,并高效完成各类AI赋能的飞行任务。
2.3.1 机载操作系统与中间件(ROS 2)
在低空AI无人机系统中,机载计算单元采用基于Linux内核的实时操作系统(如Ubuntu with RT-Preempt或ROS 2官方支持的嵌入式Linux发行版),以确保对传感器数据采集、飞行控制与AI推理任务的可预测低延迟响应。该系统通过内核级优化实现任务调度优先级管理,保障关键飞行控制线程的实时性,同时为上层应用提供稳定的POSIX兼容环境。
作为软件框架的核心,我们选用ROS 2(Robot Operating System 2)作为分布式中间件,其数据分发服务(DDS)通信机制为无人机各模块提供了松耦合、高可靠的数据交换基础。ROS 2的 QoS(服务质量)策略可针对不同数据流配置可靠性、持久性与截止时间要求,例如:
- 飞行状态与IMU数据采用**“可靠性(Reliable)”与“保持最后(Keep Last)”**策略,确保关键控制信息无丢失且低延迟。
- 非关键监控数据可采用**“尽力而为(Best Effort)”**策略,以减少通信开销。
节点模块化设计将系统功能分解为独立节点,通过话题(Topics)、服务(Services)与动作(Actions)进行交互。典型节点包括:
- 传感器驱动节点(相机、LiDAR、IMU)
- 融合定位节点(视觉惯性里程计/VIO)
- 路径规划节点
- 飞行控制节点
- AI推理节点(目标检测、跟踪)
各节点可独立部署与更新,显著提升系统可维护性与扩展性。
为满足机载资源约束,我们对ROS 2进行轻量化配置:移除图形化工具依赖,仅保留核心客户端库(rclcpp/rclpy)及必要通信组件;通过编译选项剥离调试代码,减少内存占用。通信中间件选用Cyclone DDS或Fast DDS的轻量版本,其在嵌入式环境中表现出较低的内存与CPU开销。以下为典型资源占用估算:
| 组件 | CPU占用(峰值) | 内存占用 | 存储占用 |
|---|---|---|---|
| Linux内核(实时补丁) | 3-5% | 50 MB | 500 MB |
| ROS 2核心(含DDS) | 8-12% | 80-120 MB | 200 MB |
| 关键节点组(控制+定位) | 25-35% | 300 MB | 150 MB |
| AI推理节点(TensorRT) | 40-60% | 1-2 GB | 500 MB |
系统启动流程采用分层初始化:首先加载硬件驱动与实时内核模块,随后启动ROS 2守护进程,最后按依赖顺序激活功能节点。通过启动配置文件(launch files)管理节点组,支持快速模式切换(如“悬停观测”、“自主巡检”、“应急返航”)。
故障容错机制依托ROS 2生命周期节点管理,关键节点具备看门狗监视与自动重启功能;通信链路中断时,采用本地缓存与数据插值策略维持短期可控性。所有节点日志通过统一接口收集,并通过遥测链路同步至地面站,用于在线监控与事后分析。
通过以上设计,ROS 2中间件为无人机提供了一个灵活、可靠且资源高效的软件运行环境,能够有效支撑从底层传感到高层智能决策的完整功能栈,同时保持系统的实时响应与稳定运行。
2.3.2 模块化软件架构:感知、决策、控制、通信模块
模块化软件架构采用分层解耦设计,将系统核心功能划分为感知、决策、控制与通信四大独立模块,各模块通过标准化的接口与消息中间件进行数据交互,确保系统的高内聚、低耦合与可扩展性。感知模块作为系统的数据输入源,负责实时采集与处理多传感器数据;决策模块依据感知信息进行任务规划与行为决策;控制模块将决策指令转化为具体的飞行与任务执行动作;通信模块则确保机载系统与地面站、其他无人机及外部网络之间的可靠数据链路。所有模块均以独立进程或服务形式运行,通过统一的通信总线(如基于ROS 2的DDS数据分发服务)进行异步通信,支持模块的动态加载、更新与故障隔离,从而提升系统的整体可靠性与维护性。
感知模块集成视觉相机、激光雷达、毫米波雷达、IMU及GNSS等传感器,通过传感器融合算法构建无人机对环境的实时理解。其软件层包含设备驱动、原始数据预处理、特征提取与融合估计等子单元。例如,视觉数据流经目标检测神经网络(如YOLOv5)识别特定目标,点云数据通过PCL库进行聚类与障碍物分割,最终输出融合后的环境语义地图、障碍物列表及自身定位信息至决策模块。关键数据流处理延时需控制在100毫秒以内,以保证后续决策的实时性。
决策模块接收感知模块的结构化环境信息,结合预设任务(如巡检、跟踪、测绘)进行实时决策。该模块采用分层状态机与行为树混合架构,将高级任务分解为可执行的原子行为。例如,在自主巡检任务中,决策流程如下:
- 全局路径规划:基于已知地图与任务点生成最优巡航路径。
- 局部避障:根据实时感知的障碍物动态调整局部轨迹。
- 任务调度:管理多个子任务(如拍照、悬停、回传)的执行顺序与条件跳转。
决策模块输出为高层控制指令,如目标航点、期望速度及特定任务动作指令。
控制模块负责将决策指令转化为底层飞控系统可执行的控制量。该模块包含位置控制器、姿态控制器及执行器接口,采用串级PID与模型预测控制(MPC)相结合的方法,确保无人机在各种飞行状态下的稳定性与跟踪精度。控制周期严格保持10毫秒,以实现高速响应。同时,模块内置安全监控机制,当检测到指令异常或系统故障时,自动切换至悬停或返航模式。
通信模块采用双链路冗余设计,确保数据传输的连续性与鲁棒性。主要链路使用5G/4G网络进行大带宽、远距离通信(如图像、点云流),备用链路采用低延迟的数传电台传输关键控制指令与状态信息。通信协议遵循MAVLink标准,并在此基础上扩展自定义消息包以满足AI任务需求。模块实现数据加密、丢包重传与链路自动切换功能,关键指令端到端延迟要求低于50毫秒。
各模块间的接口与数据流定义如下表所示:
| 模块 | 输入 | 输出 | 协议/格式 |
|---|---|---|---|
| 感知模块 | 传感器原始数据(图像、点云、IMU等) | 环境语义地图、障碍物列表、无人机定位位姿 | Protobuf序列化数据 |
| 决策模块 | 感知信息、任务脚本、地面站指令 | 目标航点、速度指令、任务动作命令 | JSON格式任务描述 |
| 控制模块 | 决策指令、当前状态反馈 | 电机油门、舵面控制量、执行器指令 | MAVLink扩展消息 |
| 通信模块 | 各模块上行数据、地面站下行指令 | 网络数据包、解码后内部消息 | MAVLink over TCP/UDP |
为直观展示模块间交互关系,以下采用mermaid图描述核心数据流:
所有软件模块均基于Ubuntu 20.04 LTS与ROS 2 Foxy框架开发,采用C++与Python混合编程,关键性能模块使用C++实现以保证效率。模块配置与参数通过统一的YAML文件管理,支持地面站远程动态调整。该架构已通过仿真测试与原型机验证,能够满足复杂低空环境下自主飞行与智能作业的需求。
3. 核心AI功能模块设计方案
核心AI功能模块基于模块化、可扩展的架构进行设计,确保系统在实时性、可靠性与计算效率之间取得平衡。整体上,AI功能分为环境感知与理解、自主决策与规划、任务执行与协同三大层次,各层次通过统一的中枢数据总线进行信息交换与指令传递,并依托机载边缘计算单元与云端训练平台协同工作。
环境感知与理解模块首先通过多传感器融合系统获取数据,包括高分辨率可见光相机、红外热成像仪、激光雷达以及毫米波雷达。原始数据输入至感知子模块,由轻量化的卷积神经网络进行实时处理,实现目标检测、识别与跟踪。具体性能指标如下表所示:
| 感知任务 | 算法模型 | 精度(mAP) | 处理延迟(ms) | 适用条件 |
|---|---|---|---|---|
| 车辆检测 | YOLOv5s-INT8 | 89.5% | 15 | 昼间,能见度>1km |
| 行人检测 | NanoDet-M | 82.3% | 12 | 昼间,无密集遮挡 |
| 基础设施识别 | EfficientNet-B1 | 94.0% | 25 | 全天候 |
| 动态障碍物跟踪 | DeepSORT+MobileNetV3 | 跟踪精度>90% | 20 | 相对速度<15m/s |
感知结果将传递至场景理解子模块,该模块采用图神经网络对目标间的时空关系进行建模,并结合预先加载的高精度矢量地图,实时构建局部语义地图,标识出可飞行区域、禁飞区、建筑物轮廓及潜在风险点。
自主决策与规划模块接收语义地图与实时状态信息,其核心为分层决策框架。行为决策层采用基于规则的有限状态机,确保对法规与安全边界的严格遵守,例如避让禁飞区、响应远程指令优先。在此基础上,路径规划层融合A*算法与动态窗口法,在复杂环境中实时生成平滑、可飞行的三维轨迹。
任务执行与协同模块负责将规划指令转化为具体的飞控与载荷指令。对于集群应用,该模块集成分布式协同算法,各无人机通过轻量级通信协议共享位置、状态与任务进度,实现动态任务分配与编队保持。例如,在区域巡查任务中,系统可自动将区域网格化并分配至各机,确保全覆盖且避免重复。
所有AI模块均通过模型优化技术适配机载计算资源,主要方法包括量化、剪枝与知识蒸馏,确保模型在嵌入式AI芯片(如英伟达Jetson AGX Orin)上以低功耗运行。同时,系统支持通过5G或卫星通信连接至云端管理平台,实现模型增量更新、故障诊断与大数据分析,形成闭环优化。
3.1 环境感知与建模模块
环境感知与建模模块是无人机实现自主飞行的基础,负责实时采集、处理并理解飞行环境信息,构建可用于导航与决策的环境模型。本模块采用多传感器融合方案,确保在复杂低空环境中的鲁棒性与精确性。
核心传感器配置包括一台高动态范围视觉相机、一台激光雷达(LiDAR)以及一套惯性测量单元(IMU)与GNSS的紧组合导航系统。视觉相机提供丰富的纹理与颜色信息,用于特征识别与动态目标检测;LiDAR提供精确的距离与三维点云数据,用于障碍物定位和三维地图构建;紧组合导航系统则提供高频率的载体位姿、速度及加速度信息,作为所有感知数据时空同步与融合的基准。所有传感器数据通过硬件同步触发,确保时间戳对齐,并通过统一的时空坐标系进行数据关联。
数据处理流程遵循分层融合架构。原始数据首先进行预处理:视觉图像进行畸变校正与特征提取;LiDAR点云进行运动畸变校正、地面分割与聚类;导航数据则进行卡尔曼滤波融合。随后,在特征级进行融合,将视觉特征点与LiDAR特征点进行关联,显著提升特征在光照变化或纹理缺失环境下的稳定性。最终,在决策级生成统一的环境表征,包括:
- 实时局部稠密点云地图:用于避障与精细路径规划。
- 动态障碍物列表:包含位置、速度、轨迹预测及分类(如鸟类、其他无人机、建筑物等)。
- 可通行区域语义分割图:标识出地面、植被、建筑、水域等语义类别。
为平衡计算负载与实时性要求,环境建模采用分层增量式构建方法。系统始终维护一个以无人机为中心的滑动窗口局部地图,该地图以0.1米分辨率实时更新,确保避障的即时性。同时,关键帧和全局特征点会被提取并用于构建与更新一个轻量级的全局拓扑语义地图,该地图服务于长航程任务规划与重定位。
动态障碍物的处理是本模块的关键。系统通过多目标跟踪算法对检测到的障碍物进行持续跟踪,并采用基于恒定速度模型与交互式多模型的轨迹预测方法,以应对目标运动的突变。所有动态障碍物的状态信息将以如下格式输出至决策系统:
| 障碍物ID | 类别 (Class) | 当前位置 (X, Y, Z) | 当前速度 (Vx, Vy, Vz) | 预测轨迹 (未来2秒,10个点) | 置信度 |
|---|---|---|---|---|---|
| 001 | 鸟类 | (10.2, -5.1, 15.3) | (0.5, 2.0, 0.0) | [(10.7, -3.1, 15.3), …] | 0.92 |
| 002 | 多旋翼无人机 | (-5.0, 8.3, 20.1) | (1.0, 0.0, -0.5) | [(-4.0, 8.3, 19.6), …] | 0.98 |
模块的软件实现基于机器人操作系统(ROS 2)框架,利用其节点通信机制实现各处理单元的解耦与并行。关键算法,如视觉惯性里程计(VIO)、点云配准与目标跟踪,均采用经过工程优化的开源实现(如FAST-LIO2, OpenCV Tracking API)并进行硬件加速(如使用GPU进行图像处理,FPGA进行点云预处理),以确保在机载计算单元(如NVIDIA Jetson AGX Orin)上满足100毫秒内的整体感知延迟要求。所有输出数据将通过定义良好的ROS话题和服务发布,供下游的路径规划与控制模块订阅调用。
以下为方案原文截图

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 1
1 0
0- 0



 已为社区贡献44条内容
已为社区贡献44条内容

所有评论(0)