一文了解:多Agent协作策略与复杂任务优化方法
在人工智能向规模化、复杂化场景落地的过程中,单一智能体(Agent)受限于感知范围、计算能力与功能边界,难以高效完成复杂目标任务,多Agent协作系统应运而生。多Agent协作系统通过多个具备自主感知、决策与执行能力的智能体协同交互,将复杂任务拆解为可分布式执行的子任务,依托合理的协作策略与优化方法,实现“1+1>2”的全局协同效应。复杂任务优化的核心是解决“任务高效拆解、并行有序执行、资源合理分
在人工智能向规模化、复杂化场景落地的过程中,单一智能体(Agent)受限于感知范围、计算能力与功能边界,难以高效完成复杂目标任务,多Agent协作系统应运而生。多Agent协作系统通过多个具备自主感知、决策与执行能力的智能体协同交互,将复杂任务拆解为可分布式执行的子任务,依托合理的协作策略与优化方法,实现“1+1>2”的全局协同效应。复杂任务优化的核心是解决“任务高效拆解、并行有序执行、资源合理分配、冲突有效化解”四大关键问题,本文围绕层次任务网络(HTN)任务分解、基于依赖图的并行调度、资源共享与负载均衡、协商与冲突解决四大核心方向,结合多Agent协作场景的实际需求,详细阐述协作策略与优化方法,为系统工程化落地提供理论与实践参考。
一、多Agent协作系统核心内涵与优化目标
多Agent协作系统是由多个异构或同构智能体组成的分布式智能体系,每个智能体具备独立的感知、决策、执行与通信模块,可自主感知环境、决策策略、交互信息,同时服从全局目标,通过局部交互实现全局任务高效完成。与单一智能体相比,其具备异构能力互补、动态适应性强、容错性高、可扩展性好等优势,广泛应用于工业协同控制、智慧城市管理、智能机器人集群、分布式大模型推理等复杂场景。
复杂任务优化的核心目标可概括为四点:一是任务分解合理,确保复杂任务拆分为可执行、可分配、成本最优的子任务;二是执行效率最大化,通过并行调度与优先级优化缩短整体耗时;三是资源利用高效,实现计算、数据等资源共享与负载均衡,避免浪费与局部过载;四是协作过程稳定,通过有效协商化解冲突,保障流程顺畅。基于上述目标,本文从任务分解、并行调度、资源管理、冲突解决四个维度,构建多Agent协作优化体系。
二、复杂任务分解方法:基于层次任务网络(HTN)的递归优化分解
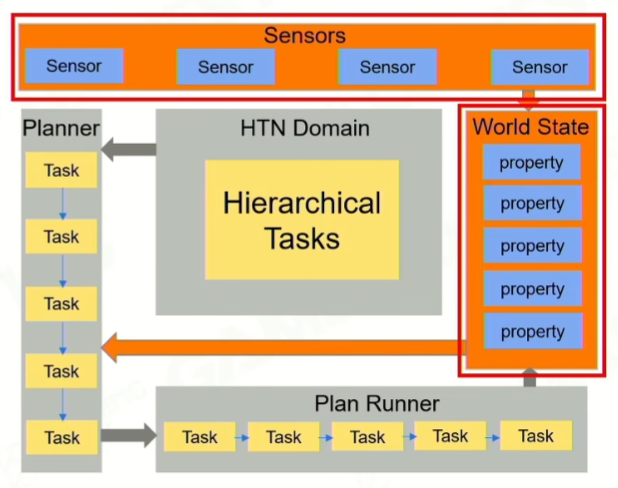
复杂任务具备目标抽象、流程复杂、子任务关联紧密、成本可控性要求高等特点,合理分解是多Agent协作优化的前提。层次任务网络(HTN)作为高效的任务分解算法,可基于领域知识与任务逻辑,将高层抽象目标递归拆解为底层可执行的原子子任务,同时通过成本约束,确保分布式协作的经济性与高效性,是复杂任务分解的核心方法。
HTN算法的核心思想是“层次化递归、目标导向、成本优化”,分解过程以高层目标为起点,结合预设任务方法库与领域规则,逐层拆解至不可再分的原子子任务。与传统分解方法相比,其优势在于:一是分解逻辑贴合业务场景,依托领域知识确保子任务关联性与可执行性;二是支持成本约束,动态计算子任务成本,确保所有子任务成本总和满足∑c(Ti) < c(T),实现分布式协作降本增效。
HTN算法在多Agent协作系统中的具体分解流程如下:
第一步,目标初始化与建模。明确复杂任务高层目标T,定义完成时间、资源限制等约束条件,建立任务成本评估模型c(T),涵盖计算、时间、资源消耗等成本,结合场景需求量化评估指标。
第二步,方法库匹配与初步分解。基于目标T查询任务方法库,匹配合适的分解规则,筛选符合约束条件的子任务拆分方式,避免分解结果超出资源或时间限制。
第三步,递归拆解与原子化处理。对初步分解的子任务Ti进行判断,若仍为复杂子任务则继续递归拆解,直至所有子任务均为原子子任务。拆解过程中实时计算c(Ti),严格遵循∑c(Ti) < c(T)的约束,避免无效分解。
第四步,分解结果校验与优化。校验子任务的关联性、可执行性与成本约束,针对匹配失败、冲突、成本超支等问题调整分解方式,同时明确子任务的执行主体、约束条件与依赖关系,为后续调度奠定基础。
此外,可结合动态调整机制,针对智能体故障、资源不足、任务变更等异常情况,实时调整子任务分解与分配方案,提升HTN算法的适应性与灵活性。HTN算法可有效解决复杂任务“难拆解、成本高、执行乱”的问题,为并行调度与资源管理提供有力支撑。
三、基于依赖图的并行执行优化:拓扑排序与动态优先级调度
复杂任务经HTN算法分解为原子子任务后,子任务间往往存在依赖关系,若随机分配易导致执行混乱、并行度不足甚至死锁。因此,需通过构建任务依赖图,结合拓扑排序与动态优先级调度,实现子任务有序并行执行,最大化提升整体效率。
3.1 任务依赖图(DAG)构建
任务依赖图是描述子任务间依赖关系的有向无环图,核心作用是呈现子任务先后执行顺序、识别可并行子任务,为调度优化提供依据,构建流程基于HTN分解结果:
一是定义节点与边:以原子子任务为节点,包含子任务ID、执行成本等属性;以依赖关系为有向边,若子任务A依赖子任务B的结果,则构建B指向A的边。二是有效性校验:确保DAG图无环,消除循环依赖,校验节点与边的完整性、合理性。三是简化与优化:合并冗余节点与边,标记可并行节点组,提升调度效率。
DAG图可清晰呈现依赖关系,避免执行混乱与死锁,为后续拓扑排序与并行调度提供直观依据。
3.2 拓扑排序与并行执行规划
拓扑排序基于DAG图,在不违反依赖关系的前提下确定子任务线性执行顺序,同时识别可并行子任务,执行流程如下:
第一步,初始化DAG图与入度数组,统计各节点入度(入度为0表示无前置依赖,可直接执行),将入度为0的节点加入队列。第二步,队列处理与排序生成,依次取出队列中入度为0的节点加入排序列表,删除其出边并更新对应子任务入度,将入度变为0的节点加入队列,直至队列为空。第三步,并行子任务识别,同一时刻队列中的入度为0节点,可分配给不同智能体并行执行,缩短整体耗时。
拓扑排序可最大化挖掘并行潜力,结合智能体数量与能力分配子任务,实现并行执行高效化。
3.3 动态优先级调度优化
为进一步提升效率,确保高价值、高紧急性任务优先完成,引入动态优先级调度机制。子任务优先级根据实时状态动态调整,计算公式为:P = w1·紧急性 + w2·业务价值,其中w1、w2为权重系数且w1 + w2 = 1,可根据场景动态调整。
紧急性反映时间约束,评估指标包括截止时间、等待时长、链路关键程度;业务价值反映对整体目标的贡献,评估指标包括结果影响、资源占用收益、预设业务优先级。动态优先级调度流程为:实时采集指标计算优先级,在拓扑排序基础上按优先级分配任务与资源,实时监控并动态调整执行顺序与资源分配。
该机制可解决“任务执行无序、高价值任务延误”的问题,实现系统资源向高紧急、高价值任务倾斜,提升整体执行效率与业务收益。
四、资源共享与负载均衡:虚拟化池与动态任务分配
多Agent协作系统中,各智能体资源存在异构性与不均衡性,若无法有效共享与分配,易导致局部过载、局部闲置,严重影响系统性能。构建资源共享机制与负载均衡策略,是系统容错与优化的重要支撑,核心目标是实现资源高效利用、避免局部过载、保障系统稳定。
4.1 资源虚拟化池构建
资源虚拟化池是资源共享的核心载体,核心思想是整合所有智能体的分散资源,经虚拟化处理后构建统一资源池,智能体通过统一接口申请、使用、释放资源,实现集中管理与高效共享,涵盖四大核心资源:
计算资源虚拟化池:整合CPU、GPU等算力资源,通过容器化等技术形成统一算力池,按需分配、动态释放,支撑高算力需求任务。数据资源虚拟化池:整合各类数据,通过标准化与共享协议实现互联互通,减少数据冗余,提升利用效率。模型与工具资源虚拟化池:整合预训练模型、推理工具等,避免重复训练与开发,降低成本与延迟。存储资源虚拟化池:整合本地与云端存储,实现集中管理与弹性分配,匹配任务存储需求。
资源虚拟化池需满足三大要求:统一性(接口、协议、标准统一)、动态性(实时感知资源状态,支持弹性扩缩容)、安全性(具备访问控制、数据加密等功能)。
4.2 基于负载状态的动态任务分配
资源虚拟化池实现资源共享,动态任务分配实现资源合理分配与负载均衡,核心思想是实时采集智能体负载状态,动态分配任务,避免局部过载。
首先,负载状态实时采集与评估。构建负载监控体系,采集CPU利用率、内存占用率等指标,建立评估模型,将负载分为空闲(<30%)、正常(30%-70%)、过载(>70%)三个等级,为任务分配提供依据。
其次,动态任务分配策略执行。调度器结合HTN分解结果、DAG排序结果、子任务优先级与智能体负载状态,遵循负载均衡、能力匹配、优先级适配、动态调整四大原则分配任务,确保任务分配合理高效。
动态任务分配流程为:获取负载与任务信息→筛选候选智能体→选择最优智能体分配任务→实时监控并动态调整→更新负载状态。此外,可引入任务迁移、预热调度、弹性扩缩容等策略,进一步提升负载均衡效果,保障系统稳定高效运行。
五、协商与冲突解决机制:规则与拍卖协同优化
多Agent协作中,因智能体自主决策性、目标差异性、资源有限性,易出现资源竞争、目标冲突、任务争抢等问题,若无法及时解决,会导致协作中断、任务延迟甚至死锁。设计合理的协商与冲突解决机制,是保障系统稳定运行的关键。
针对不同冲突类型,本文设计两类协同优化机制,分别适用于不同场景,确保冲突快速高效解决。
5.1 基于规则的协商机制
该机制核心是预设协商规则,冲突发生时自动裁决,无需复杂协商,适用于结构化、冲突场景固定的系统,具备高效、低延迟、易实现的优势。
预设规则覆盖各类冲突,主要包括:优先级规则(预设智能体与子任务优先级,高优先级优先获得资源与执行权);资源占用规则(根据资源需求、占用时长等分配资源,避免浪费);任务归属规则(根据智能体能力、负载、历史效果确定任务执行主体)。
执行流程为:识别冲突类型→查询预设规则→自动裁决→冲突双方执行裁决结果。其局限性是灵活性较差,无法应对复杂、突发冲突。
5.2 基于拍卖的协商机制
该机制将任务或资源作为拍卖品,调度中心作为拍卖方,智能体作为投标方,通过竞价确定分配主体,适用于复杂、动态冲突场景,可实现资源最优分配,具备灵活性强、支持自主决策的优势。
主要分为任务拍卖与资源拍卖两类:任务拍卖适用于任务争抢,调度中心发布拍卖信息,智能体提交投标方案,调度中心选择最优投标方分配任务;资源拍卖适用于资源竞争,流程与任务拍卖类似,核心是实现全局收益最大化。
投标价格结合智能体执行成本、负载状态、任务价值设定,其局限性是执行流程复杂、协商延迟较高,中心化场景存在单点故障风险。
实际应用中,可结合两类机制:结构化冲突采用基于规则的机制,确保高效低延迟;复杂动态冲突采用基于拍卖的机制,确保灵活性与全局优化,实现冲突解决的高效合理。
六、总结:未来可从三个方向进一步优化
多Agent协作策略与复杂任务优化方法,是提升系统性能、实现复杂任务高效执行的核心支撑。本文围绕四大核心维度构建完整优化体系:HTN递归分解实现复杂任务合理拆解与成本优化;DAG拓扑排序与动态优先级调度实现子任务有序并行,提升执行效率;资源虚拟化池与动态任务分配实现资源高效共享与负载均衡;规则与拍卖协同机制有效化解冲突,保障协作顺畅。
上述方法相互协同,可有效解决多Agent协作中“任务难拆解、效率低、资源利用率低、冲突难解决”等问题,适用于各类复杂场景,为系统工程化落地提供支撑。
未来可从三个方向进一步优化:一是智能化优化,引入强化学习等算法,实现任务分解、调度等环节自主智能化;二是去中心化优化,研究去中心化调度与协商机制,提升系统鲁棒性与可扩展性;三是跨场景适配优化,结合不同场景需求优化策略,推动多Agent协作系统广泛应用。
学AI大模型的正确顺序,千万不要搞错了
🤔2026年AI风口已来!各行各业的AI渗透肉眼可见,超多公司要么转型做AI相关产品,要么高薪挖AI技术人才,机遇直接摆在眼前!
有往AI方向发展,或者本身有后端编程基础的朋友,直接冲AI大模型应用开发转岗超合适!
就算暂时不打算转岗,了解大模型、RAG、Prompt、Agent这些热门概念,能上手做简单项目,也绝对是求职加分王🔋

📝给大家整理了超全最新的AI大模型应用开发学习清单和资料,手把手帮你快速入门!👇👇
学习路线:
✅大模型基础认知—大模型核心原理、发展历程、主流模型(GPT、文心一言等)特点解析
✅核心技术模块—RAG检索增强生成、Prompt工程实战、Agent智能体开发逻辑
✅开发基础能力—Python进阶、API接口调用、大模型开发框架(LangChain等)实操
✅应用场景开发—智能问答系统、企业知识库、AIGC内容生成工具、行业定制化大模型应用
✅项目落地流程—需求拆解、技术选型、模型调优、测试上线、运维迭代
✅面试求职冲刺—岗位JD解析、简历AI项目包装、高频面试题汇总、模拟面经
以上6大模块,看似清晰好上手,实则每个部分都有扎实的核心内容需要吃透!
我把大模型的学习全流程已经整理📚好了!抓住AI时代风口,轻松解锁职业新可能,希望大家都能把握机遇,实现薪资/职业跃迁~
这份完整版的大模型 AI 学习资料已经上传CSDN,朋友们如果需要可以微信扫描下方CSDN官方认证二维码免费领取【保证100%免费】


有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 1
1 0
0- 0



 已为社区贡献719条内容
已为社区贡献719条内容

所有评论(0)