[ZYNQ Linux] 端侧AI模型部署(DPU)
3.用Ultra RAM(容量较大、速率较慢)可以降低Bram的使用petalinux根据平台会自动生成相关的设备树。驱动Linux新的版本已经加入xilinx_dpu的驱动。源码里面没找到,下载xilinx_dpu.c、xilinx_dpu.h单独编译成模块。驱动注册后会生成/dev/dpu设备。用户空间petalinux 里面要加入meta_vitis_ai层,把xrt等相关ai的库编译到文件
·
[ZYNQ Linux] 端侧AI模型部署(DPU)
环境
- Vitis2023.1
- 4ev
- DPU4.1
PL
- DPU 不在Vivado里面,需要单独下载并加入到仓库里面
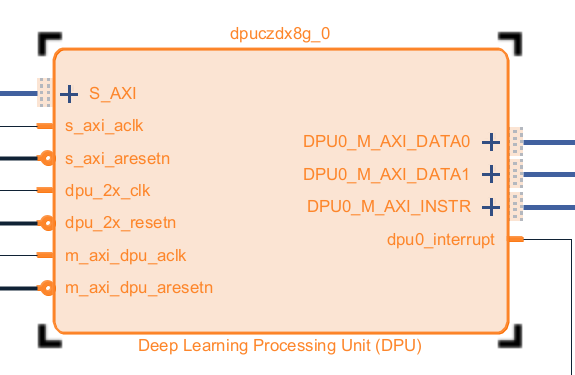
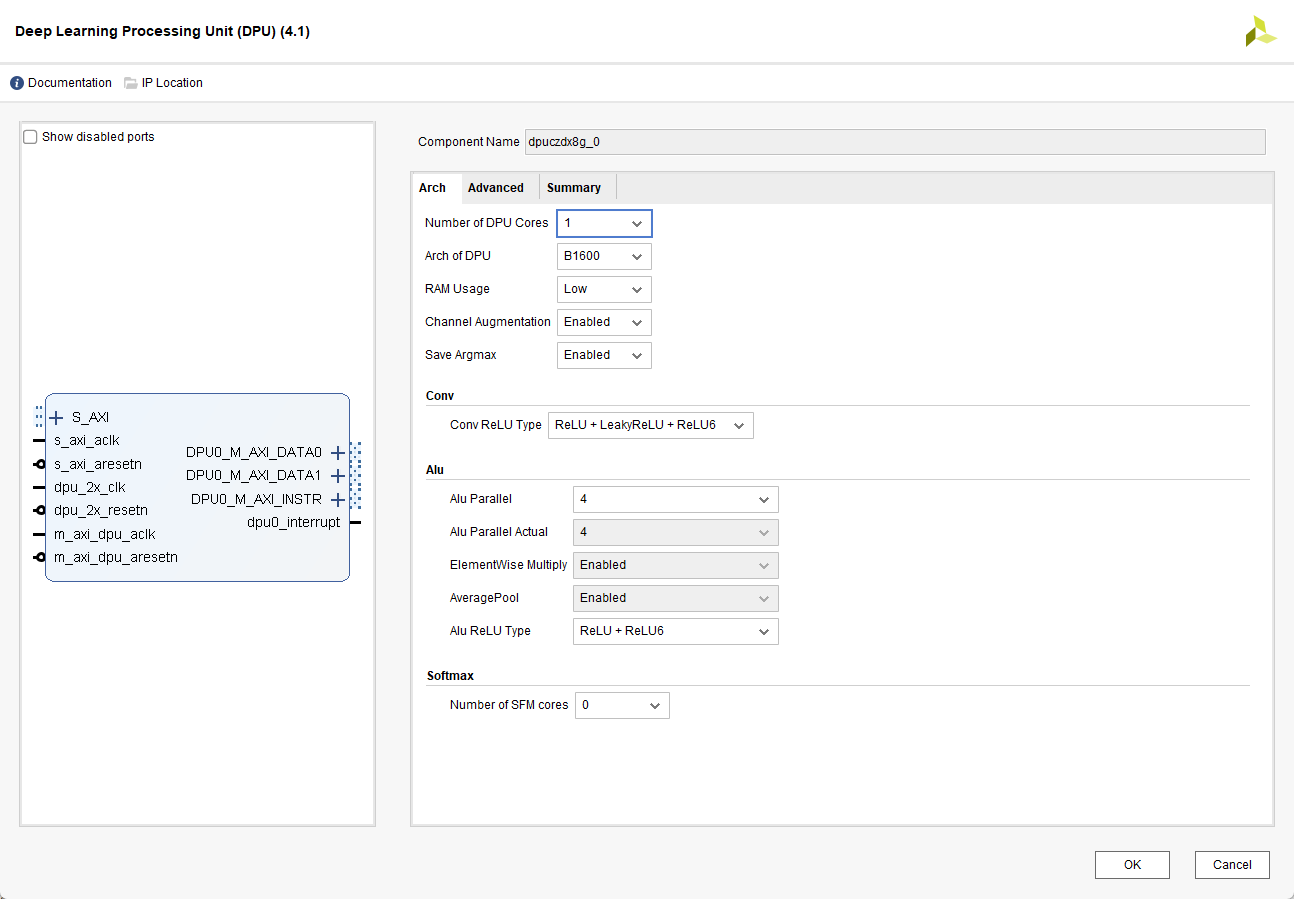
- DPU有不同的配置,需要的资源也不一样,根据实际情况选择,这里选择B1600
3. 用Ultra RAM(容量较大、速率较慢)可以降低Bram的使用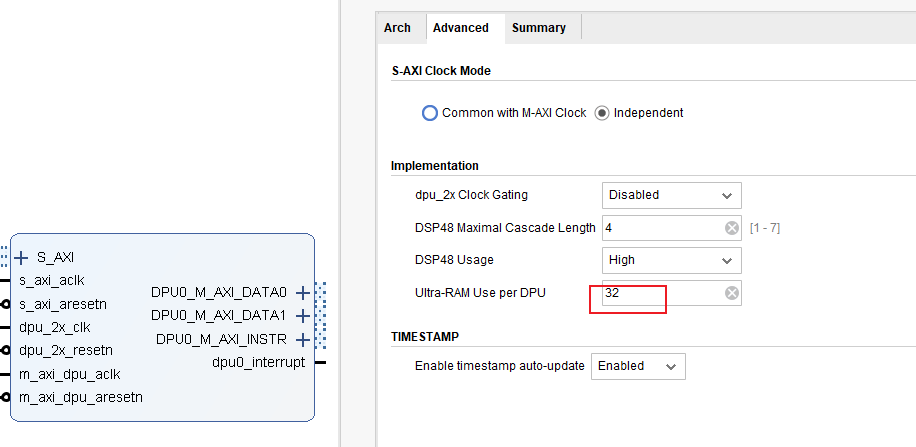
PS
内核驱动
设备树
petalinux根据平台会自动生成相关的设备树。
dpuczdx8g_0: dpuczdx8g@81000000 {
clock-names = "s_axi_aclk", "dpu_2x_clk", "m_axi_dpu_aclk";
clocks = <&zynqmp_clk 71>, <&misc_clk_0>, <&misc_clk_1>;
compatible = "xlnx,dpuczdx8g-4.1";
interrupt-names = "dpu0_interrupt";
interrupt-parent = <&gic>;
interrupts = <0 93 4>;
reg = <0x0 0x81000000 0x0 0x1000000>;
};
驱动
Linux新的版本已经加入xilinx_dpu的驱动。
源码里面没找到,下载xilinx_dpu.c、xilinx_dpu.h单独编译成模块。
驱动注册后会生成/dev/dpu设备。
[ 8.637444] xlnx-dpu 81000000.dpuczdx8g: Freq: axilite: 99 MHz, dpu: 199 MHz, dsp: 399 MHz
[ 8.637464] xlnx-dpu 81000000.dpuczdx8g: found 1 dpu core @200MHz and 0 softmax core
[ 8.638241] xlnx-dpu 81000000.dpuczdx8g: dpu registered as /dev/dpu successfully
用户空间
petalinux 里面要加入meta_vitis_ai层,把xrt等相关ai的库编译到文件系统。理论上可以单独编译,比较复杂。
这些运行环境(库、命令工具)是在/dev/dpu的驱动上提供了C、Python等的调用接口,使用起来更方便。
xdputil 命令
- 查询DPU状态、进行DPU测试等等
xdputil query
{
"DPU IP Spec":{
"DPU Core Count":1,
"IP version":"v4.1.0",
"enable softmax":"False"
},
"VAI Version":{
"libvart-runner.so":"Xilinx vart-runner Version: 3.5.0-b7953a2a9f60e23efdfced5c186328dd1449665c 2025-10-18-08:16:45 ",
"libvitis_ai_library-dpu_task.so":"Advanced Micro Devices vitis_ai_library dpu_task Version: 3.5.0-b7953a2a9f60e23efdfced5c186328dd1449665c 2023-06-29 03:20:28 [UTC] ",
"libxir.so":"Xilinx xir Version: xir-b7953a2a9f60e23efdfced5c186328dd1449665c 2023-09-12-22:56:08",
"target_factory":"target-factory.3.5.0 b7953a2a9f60e23efdfced5c186328dd1449665c"
},
"kernels":[
{
"DPU Arch":"DPUCZDX8G_ISA1_B1600",
"DPU Frequency (MHz)":200,
"XRT Frequency (MHz)":100,
"cu_idx":0,
"fingerprint":"0x101000056010404",
"is_vivado_flow":true,
"name":"DPU Core 0"
}
]
}
xdputil status
{
"kernels":[
{
"addrs_registers":{
"dpu0_base_addr_0":"0x5cd00000",
"dpu0_base_addr_1":"0x60800000",
"dpu0_base_addr_2":"0x5bb80000",
"dpu0_base_addr_3":"0x5bb40000",
"dpu0_base_addr_4":"0x0",
"dpu0_base_addr_5":"0x0",
"dpu0_base_addr_6":"0x0",
"dpu0_base_addr_7":"0x0"
},
"common_registers":{
"ADDR_CODE":"0x7070f0f",
"CONV END":26034,
"CONV START":26034,
"HP_ARCOUNT_MAX":7,
"HP_ARLEN":15,
"HP_AWCOUNT_MAX":7,
"HP_AWLEN":15,
"LOAD END":56453,
"LOAD START":56453,
"MISC END":6876,
"MISC START":6876,
"PROF_NUM":0,
"PROF_VALUE":0,
"SAVE END":9608,
"SAVE START":9608
},
"name":"DPU Registers Core 0"
}
]
模型量化
板端算力有限,常规模型(浮点)需要计算量太大,需要转为整型模型,同时还要适配DPU这个IP核。
在vitis_ai的docker容器里进行模型的优化和量化,直接使用命令行工具。
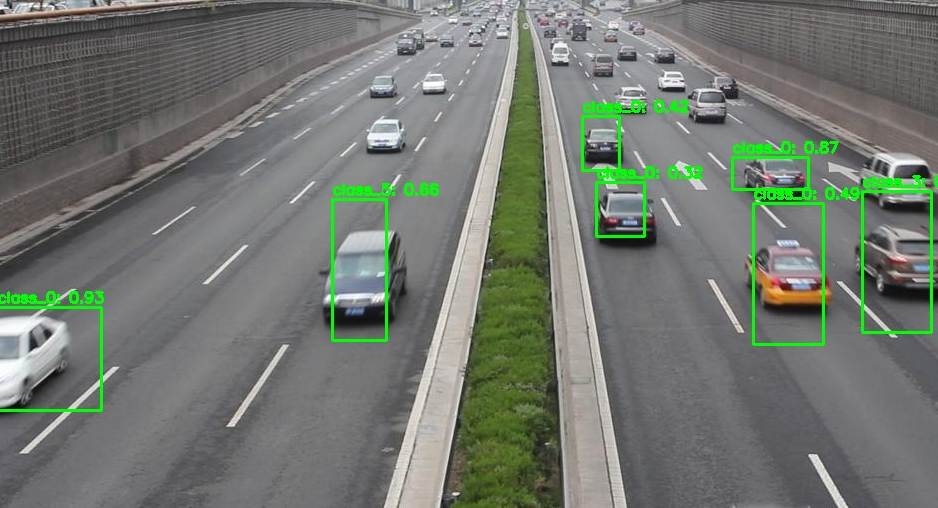
运行测试
工具简单测试
xdputil benchmark tf_yolov3_vehicle.xmodel 1
WARNING: Logging before InitGoogleLogging() is written to STDERR
I20221108 16:06:05.424556 14502 test_dpu_runner_mt.cpp:477] shuffle results for batch...
I20221108 16:06:05.430514 14502 performance_test.hpp:73] 0% ...
I20221108 16:06:11.430667 14502 performance_test.hpp:76] 10% ...
I20221108 16:06:17.430840 14502 performance_test.hpp:76] 20% ...
I20221108 16:06:23.431015 14502 performance_test.hpp:76] 30% ...
I20221108 16:06:29.431193 14502 performance_test.hpp:76] 40% ...
I20221108 16:06:35.431375 14502 performance_test.hpp:76] 50% ...
I20221108 16:06:41.431551 14502 performance_test.hpp:76] 60% ...
I20221108 16:06:47.431721 14502 performance_test.hpp:76] 70% ...
I20221108 16:06:53.431895 14502 performance_test.hpp:76] 80% ...
I20221108 16:06:59.432073 14502 performance_test.hpp:76] 90% ...
I20221108 16:07:05.432251 14502 performance_test.hpp:76] 100% ...
I20221108 16:07:05.432341 14502 performance_test.hpp:79] stop and waiting for all threads terminated....
I20221108 16:07:05.499524 14502 performance_test.hpp:85] thread-0 processes 168 frames
I20221108 16:07:05.499594 14502 performance_test.hpp:93] it takes 67225 us for shutdown
I20221108 16:07:05.499619 14502 performance_test.hpp:94] FPS= 2.79678 number_of_frames= 168 time= 60.0691 seconds.
I20221108 16:07:05.499673 14502 performance_test.hpp:96] BYEBYE
Test PASS.
python接口调用
- 量化参数可以使用xdputil获取
import os
import cv2
import time
import numpy as np
import xir
import vart
# ==================== 配置参数 ====================
MODEL_PATH = "tf_yolov3_vehicle.xmodel"
IMAGE_PATH = "test.jpg"
OUTPUT_PATH = "result.jpg"
CONF_THRESHOLD = 0.3 # 置信度阈值
SIZE_FILTER_RATIO = 0.8 # 丢弃宽高大于原图80%的框
MIN_BOX_SIZE = 10 # 丢弃宽高小于10像素的框
TOP_EDGE_THRESHOLD = 5 # 丢弃ymin小于此值的框(图片上方边缘)
ANCHORS = np.array([
(10, 13), (16, 30), (33, 23),
(30, 61), (62, 45), (59, 119),
(116, 90), (156, 198), (373, 326)
])
CLASS_NAMES = ["vehicle"] # 会被模型实际类别数覆盖
# 量化参数(从xmodel获取)
INPUT_SCALE = 0.015625 # 2^-6
OUTPUT_SCALE = 0.25 # 2^-2
INPUT_ZERO_POINT = 0
OUTPUT_ZERO_POINT = 0
DEBUG = True
# =================================================
def sigmoid(x):
return 1 / (1 + np.exp(-x))
def get_child_subgraph_dpu(graph: xir.Graph):
root = graph.get_root_subgraph()
if root.is_leaf:
return []
child_subgraphs = root.toposort_child_subgraph()
return [cs for cs in child_subgraphs
if cs.has_attr("device") and cs.get_attr("device").upper() == "DPU"]
def decode_yolo_output(output, anchors, stride, conf_thresh, num_classes):
batch, grid_h, grid_w, feat_len = output.shape
num_anchors = len(anchors)
output = output.reshape(batch, grid_h, grid_w, num_anchors, -1)
tx = output[..., 0]
ty = output[..., 1]
tw = output[..., 2]
th = output[..., 3]
obj_conf = sigmoid(output[..., 4])
class_probs = sigmoid(output[..., 5:5+num_classes])
grid_x = np.arange(grid_w)
grid_y = np.arange(grid_h)
grid_x, grid_y = np.meshgrid(grid_x, grid_y)
grid_x = np.expand_dims(grid_x, axis=-1)
grid_y = np.expand_dims(grid_y, axis=-1)
grid_x = np.tile(grid_x, (1, 1, num_anchors))
grid_y = np.tile(grid_y, (1, 1, num_anchors))
cx = (grid_x + sigmoid(tx)) * stride
cy = (grid_y + sigmoid(ty)) * stride
w = np.exp(tw) * anchors[:, 0]
h = np.exp(th) * anchors[:, 1]
xmin = cx - w / 2
ymin = cy - h / 2
xmax = cx + w / 2
ymax = cy + h / 2
max_class_prob = np.max(class_probs, axis=-1)
class_id = np.argmax(class_probs, axis=-1)
confidence = obj_conf * max_class_prob
boxes = []
for b in range(batch):
mask = confidence[b] >= conf_thresh
if not np.any(mask):
continue
boxes.append(np.stack([
xmin[b][mask], ymin[b][mask], xmax[b][mask], ymax[b][mask],
confidence[b][mask], class_id[b][mask]
], axis=-1))
return np.concatenate(boxes, axis=0) if boxes else np.empty((0, 6))
def letterbox_image(image, target_size):
h, w = image.shape[:2]
target_w, target_h = target_size
scale = min(target_w / w, target_h / h)
new_w, new_h = int(w * scale), int(h * scale)
resized = cv2.resize(image, (new_w, new_h))
canvas = np.full((target_h, target_w, 3), 128, dtype=np.uint8)
dx = (target_w - new_w) // 2
dy = (target_h - new_h) // 2
canvas[dy:dy+new_h, dx:dx+new_w] = resized
return canvas, scale, dx, dy
def keep_small_boxes_no_overlap(boxes):
"""
严格无交叉:如果两个框有交集(inter面积 > 0),则只保留面积较小的框,丢弃较大的框。
boxes: (N, 6) [xmin, ymin, xmax, ymax, conf, class_id]
返回: 过滤后的boxes
"""
if len(boxes) == 0:
return boxes
# 计算面积
areas = (boxes[:, 2] - boxes[:, 0]) * (boxes[:, 3] - boxes[:, 1])
# 按面积从小到大排序(小框优先)
sorted_idx = np.argsort(areas)
boxes_sorted = boxes[sorted_idx]
areas_sorted = areas[sorted_idx]
keep = [True] * len(boxes_sorted)
for i in range(len(boxes_sorted)):
if not keep[i]:
continue
box_i = boxes_sorted[i]
for j in range(i+1, len(boxes_sorted)):
if not keep[j]:
continue
box_j = boxes_sorted[j]
# 计算交集面积
xx1 = max(box_i[0], box_j[0])
yy1 = max(box_i[1], box_j[1])
xx2 = min(box_i[2], box_j[2])
yy2 = min(box_i[3], box_j[3])
inter_area = max(0, xx2 - xx1) * max(0, yy2 - yy1)
# 只要有交集(inter_area > 0),则抑制大框
if inter_area > 0:
keep[j] = False
return boxes_sorted[keep]
def postprocess_yolov3(outputs, original_shape, anchors, num_classes, conf_thresh,
size_filter_ratio=0.8, min_size=10):
all_boxes = []
orig_h, orig_w = original_shape
in_h, in_w = 416, 416 # 模型输入尺寸
max_allowed_w = in_w * size_filter_ratio
max_allowed_h = in_h * size_filter_ratio
for out in outputs:
batch, h, w, feat_len = out.shape
# 跳过13x13层(产生超大框)
if h == 13:
continue
elif h == 26:
stride = 16
anchor_group = anchors[3:6]
elif h == 52:
stride = 8
anchor_group = anchors[0:3]
else:
continue
boxes = decode_yolo_output(out, anchor_group, stride, conf_thresh, num_classes)
if len(boxes) == 0:
continue
# 尺寸过滤(在模型输入坐标系中)
widths = boxes[:, 2] - boxes[:, 0]
heights = boxes[:, 3] - boxes[:, 1]
valid = (widths < max_allowed_w) & (heights < max_allowed_h) & (widths > min_size) & (heights > min_size)
boxes = boxes[valid]
if len(boxes) > 0:
all_boxes.append(boxes)
if not all_boxes:
return []
all_boxes = np.concatenate(all_boxes, axis=0)
# 严格无交叉重叠抑制(保留小框)
filtered_boxes = keep_small_boxes_no_overlap(all_boxes)
return filtered_boxes
def main():
if not os.path.exists(MODEL_PATH):
print(f"Error: Model file '{MODEL_PATH}' not found.")
return
if not os.path.exists(IMAGE_PATH):
print(f"Error: Image file '{IMAGE_PATH}' not found.")
return
print("1. Loading model...")
graph = xir.Graph.deserialize(MODEL_PATH)
subgraphs = get_child_subgraph_dpu(graph)
if not subgraphs:
print("Error: No DPU subgraph found.")
return
runner = vart.Runner.create_runner(subgraphs[0], "run")
input_tensors = runner.get_input_tensors()
output_tensors = runner.get_output_tensors()
input_shape = input_tensors[0].dims
print(f" Input shape: {input_shape}")
print(" Output tensors:")
for i, t in enumerate(output_tensors):
print(f" [{i}] shape={t.dims}, dtype={t.dtype}")
feat_len = output_tensors[0].dims[-1]
num_classes = (feat_len // 3) - 5
print(f" Detected num_classes: {num_classes}")
if num_classes == len(CLASS_NAMES):
class_names = CLASS_NAMES
else:
print(f" Using auto-generated class names (class_0...class_{num_classes-1})")
class_names = [f"class_{i}" for i in range(num_classes)]
orig_img = cv2.imread(IMAGE_PATH)
if orig_img is None:
print(f"Error: Cannot read {IMAGE_PATH}")
return
orig_h, orig_w = orig_img.shape[:2]
_, in_h, in_w, _ = input_shape
img_resized, scale, dx, dy = letterbox_image(orig_img, (in_w, in_h))
# 预处理
img_float = img_resized.astype(np.float32) / 255.0
input_int8 = np.clip(img_float * (1.0 / INPUT_SCALE), -128, 127).astype(np.int8)
input_buffer = np.empty(input_shape, dtype=np.int8)
input_buffer[0] = input_int8
output_buffers = [np.empty(t.dims, dtype=np.int8) for t in output_tensors]
print("2. Running inference...")
start_time = time.time()
job = runner.execute_async([input_buffer], output_buffers)
runner.wait(job)
inference_time = time.time() - start_time
print(f" Inference time: {inference_time:.3f}s")
print("3. Postprocessing...")
outputs_float = []
for buf in output_buffers:
float_out = buf.astype(np.float32) * OUTPUT_SCALE
outputs_float.append(float_out)
if DEBUG:
print(f" Output range after dequant: [{float_out.min():.3f}, {float_out.max():.3f}]")
boxes_raw = postprocess_yolov3(outputs_float, (orig_h, orig_w), ANCHORS, num_classes,
CONF_THRESHOLD, SIZE_FILTER_RATIO, MIN_BOX_SIZE)
print(f" Detected {len(boxes_raw)} objects (conf_thresh={CONF_THRESHOLD})")
# 将坐标映射回原图,并过滤顶部边缘框
final_boxes = []
for box in boxes_raw:
xmin, ymin, xmax, ymax, conf, cls_id = box
# 映射回原图坐标
xmin = (xmin - dx) / scale
ymin = (ymin - dy) / scale
xmax = (xmax - dx) / scale
ymax = (ymax - dy) / scale
# 裁剪到图像边界
xmin = max(0, min(orig_w, xmin))
ymin = max(0, min(orig_h, ymin))
xmax = max(0, min(orig_w, xmax))
ymax = max(0, min(orig_h, ymax))
# 过滤无效框
if xmin >= xmax or ymin >= ymax:
continue
# 去掉起始于图片上方边缘的框(ymin 过小)
if ymin < TOP_EDGE_THRESHOLD:
continue
final_boxes.append([int(xmin), int(ymin), int(xmax), int(ymax), conf, int(cls_id)])
print(f" Final boxes after scaling and top-edge filter: {len(final_boxes)}")
if len(final_boxes) > 0:
widths = [b[2]-b[0] for b in final_boxes]
heights = [b[3]-b[1] for b in final_boxes]
print(f" Box width range: {min(widths)} - {max(widths)}, height range: {min(heights)} - {max(heights)}")
# 绘制结果
for box in final_boxes:
xmin, ymin, xmax, ymax, conf, cls_id = box
cv2.rectangle(orig_img, (xmin, ymin), (xmax, ymax), (0, 255, 0), 2)
label = f"{class_names[cls_id]}: {conf:.2f}"
cv2.putText(orig_img, label, (xmin, ymin-5), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
cv2.imwrite(OUTPUT_PATH, orig_img)
print(f"4. Result saved to {OUTPUT_PATH}")
if __name__ == "__main__":
main()

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)