线性多智能体系统时变编队跟踪控制、领航者和跟随者分布式鲁棒自适应一致性Matlab仿真(带参考文献)
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。🍎 往期回顾关注个人主页:Matlab科研工作室👇 关注我领取海量matlab电子书和数学建模资料🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
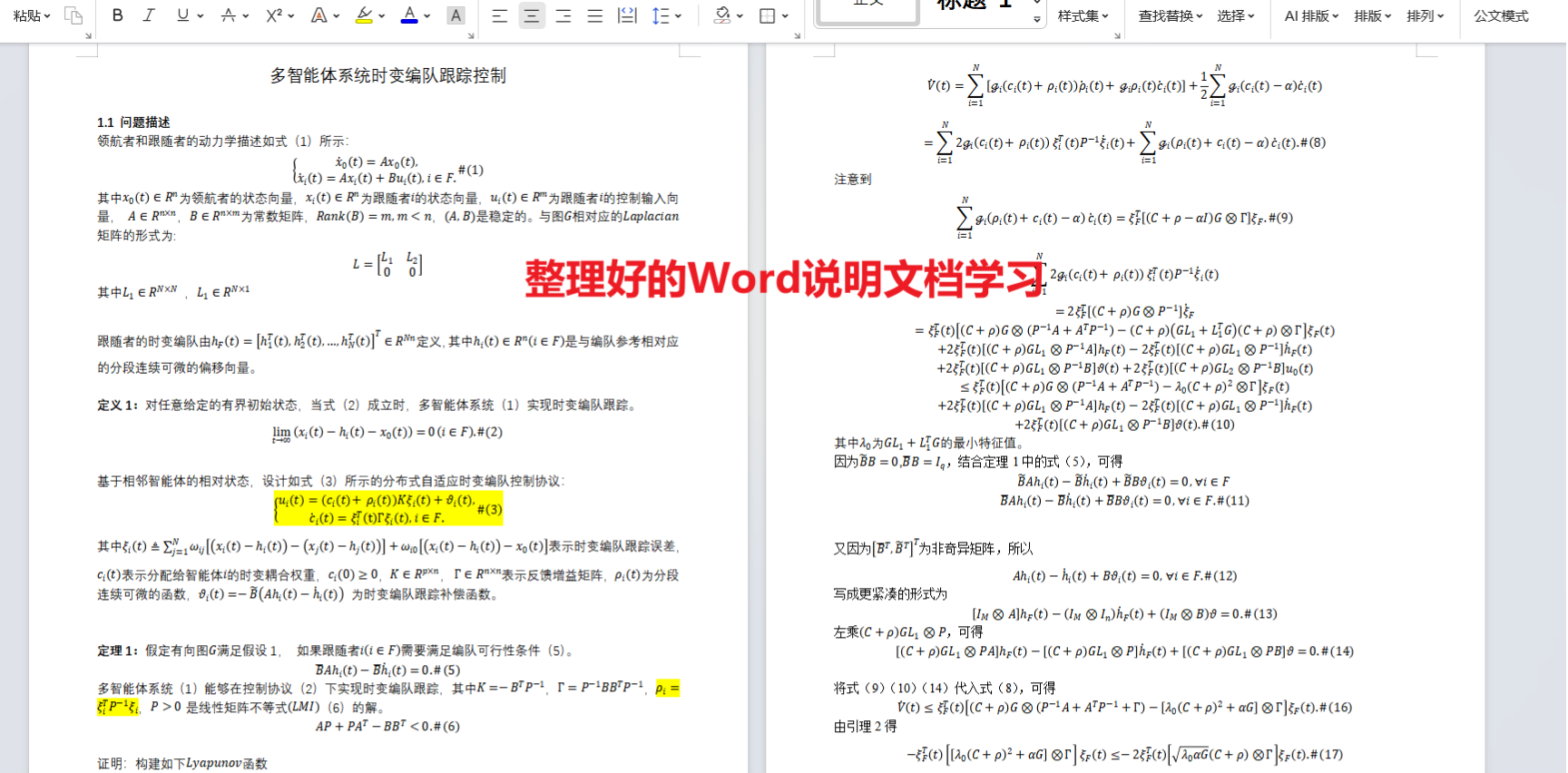
🔥 内容介绍
一、多智能体系统研究现状与需求
- 多智能体系统的广泛应用
:多智能体系统在诸多领域有着重要应用。在智能交通中,多辆自动驾驶车辆可视为多个智能体,通过协同实现高效的交通流控制,减少拥堵。在工业生产中,多个机器人协作完成复杂任务,提高生产效率和质量。在军事领域,无人机集群执行侦察、攻击等任务,展现出强大的作战能力。这些应用都依赖于多智能体系统能够实现精确的编队跟踪控制,以完成特定任务目标。
- 时变编队跟踪的重要性
:实际应用中,多智能体系统往往需要在动态环境下运行,这就要求智能体能够形成并保持时变的编队,同时跟踪特定目标。例如,在搜索救援场景中,无人机编队需要根据地形和目标位置的变化实时调整编队形状,以覆盖更大的搜索区域并快速定位目标。时变编队跟踪控制能够使多智能体系统在复杂多变的环境中保持高效协作,适应不同的任务需求。
二、领航者 - 跟随者分布式鲁棒自适应一致性控制原理
- 领航者 - 跟随者架构
:在多智能体系统中,领航者 - 跟随者架构是一种常见的编队控制模式。其中,领航者智能体负责确定整个编队的运动方向和轨迹,跟随者智能体则通过与领航者及其他跟随者的信息交互,调整自身状态以跟随领航者并保持特定的编队队形。这种架构能够将复杂的编队控制任务分解,降低控制的复杂度,使系统更容易实现和优化。
- 分布式控制
:分布式控制策略是指每个智能体仅依据自身局部信息以及与相邻智能体的交互信息来做出决策,而非依赖全局信息。在多智能体系统中,由于智能体数量众多且通信资源有限,分布式控制具有更好的可扩展性和鲁棒性。例如,每个跟随者智能体仅需获取与其直接通信的领航者或其他跟随者的状态信息,通过本地计算来调整自身控制输入,无需知晓整个系统中所有智能体的状态,这大大减少了通信负担和计算量。
- 鲁棒自适应一致性
:鲁棒性确保系统在面对不确定性因素(如模型参数摄动、外部干扰等)时仍能保持稳定运行并实现控制目标。自适应机制则使系统能够根据环境变化或自身状态的改变自动调整控制参数,以优化控制性能。在多智能体系统中,各智能体的动力学模型可能存在不确定性,外部环境也可能存在干扰,鲁棒自适应一致性控制能够使智能体在这些情况下仍能实现状态的一致性,即跟随者能够准确跟随领航者的状态变化,保持编队的稳定性和一致性。
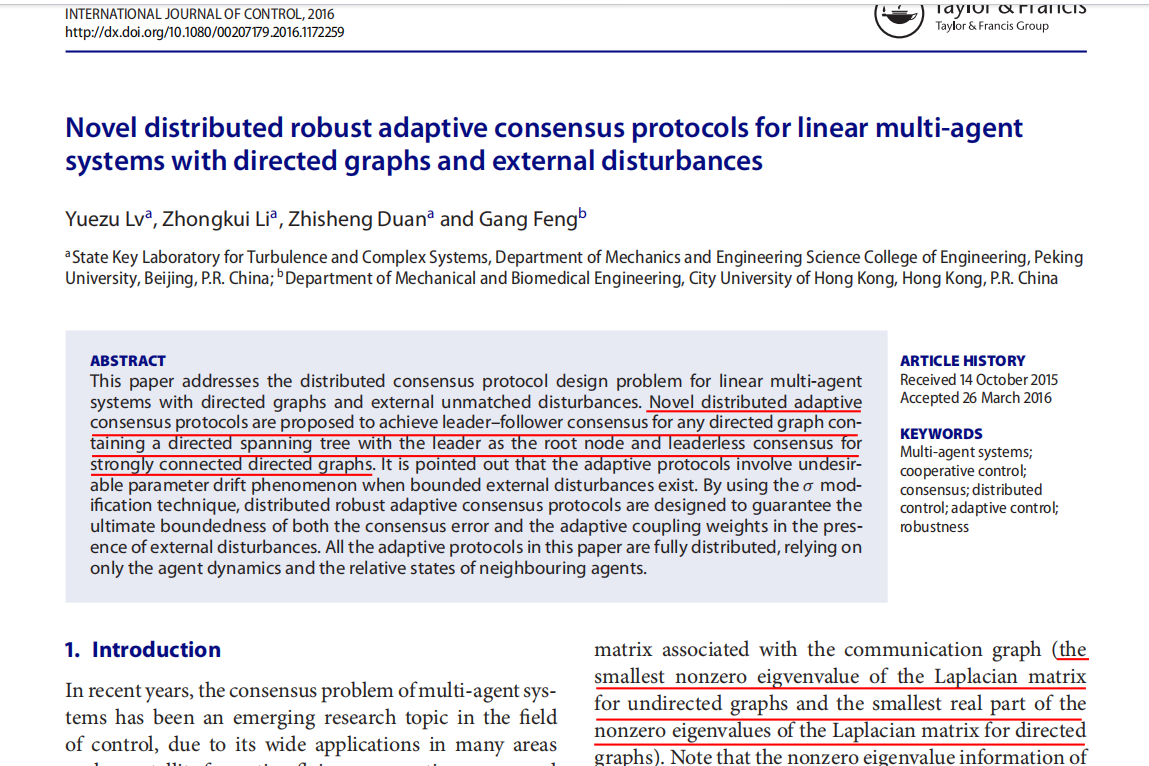
三、新颖的分布式自适应共识协议
- 实现领导者 - 跟随式共识
:该协议通过设计智能体之间的信息交互规则和控制算法,使得在任何包含以领导者为根节点的有向生成树的有向图中,跟随者能够逐渐调整自身状态,最终与领航者的状态达成一致。在有向通信拓扑中,信息从领航者向跟随者单向或多向传递,跟随者根据接收到的领航者信息以及与相邻跟随者的信息交换,通过自适应调整自身的控制输入,实现对领航者状态的跟踪。例如,在无人机编队中,领航无人机将自身的位置、速度等信息传递给跟随无人机,跟随无人机利用这些信息以及与相邻跟随无人机的信息,调整自身的飞行姿态和速度,以保持与领航无人机的一致运动。
- 实现无领导者的共识
:即使在没有明确指定领航者的情况下,该协议也能使多智能体系统实现共识。此时,智能体之间通过平等的信息交互,逐渐调整各自的状态,最终达到一致。每个智能体将自身状态与相邻智能体的状态进行比较,并根据一定的规则进行调整。随着时间推移,所有智能体的状态将趋于一致,形成一种分布式的协调运动。例如,在一群自主机器人协作完成某项任务时,没有预先指定的领导者,机器人之间通过相互通信和状态调整,最终实现协同工作,完成任务目标。
四、有向通信拓扑的作用
- 信息传递与交互
:有向通信拓扑决定了智能体之间信息传递的方向和路径。在多智能体系统中,不同的任务需求和环境条件可能需要不同的通信拓扑结构。例如,在一些情况下,领航者的信息需要快速准确地传递给所有跟随者,此时具有高效信息传递路径的有向通信拓扑能够确保信息的及时传播。有向通信拓扑还能避免信息的无效传递和冲突,提高通信效率。
- 影响编队控制性能
:通信拓扑结构直接影响多智能体系统的编队控制性能。合理设计的有向通信拓扑能够使智能体之间的信息交互更加有效,从而加快状态一致性的达成速度,提高编队的稳定性和跟踪精度。例如,在以领导者为根节点的有向生成树拓扑结构中,信息从领导者向各个分支的跟随者传递,能够保证信息的有序传播,使跟随者更好地跟随领导者的运动,实现稳定的编队跟踪。
![]()
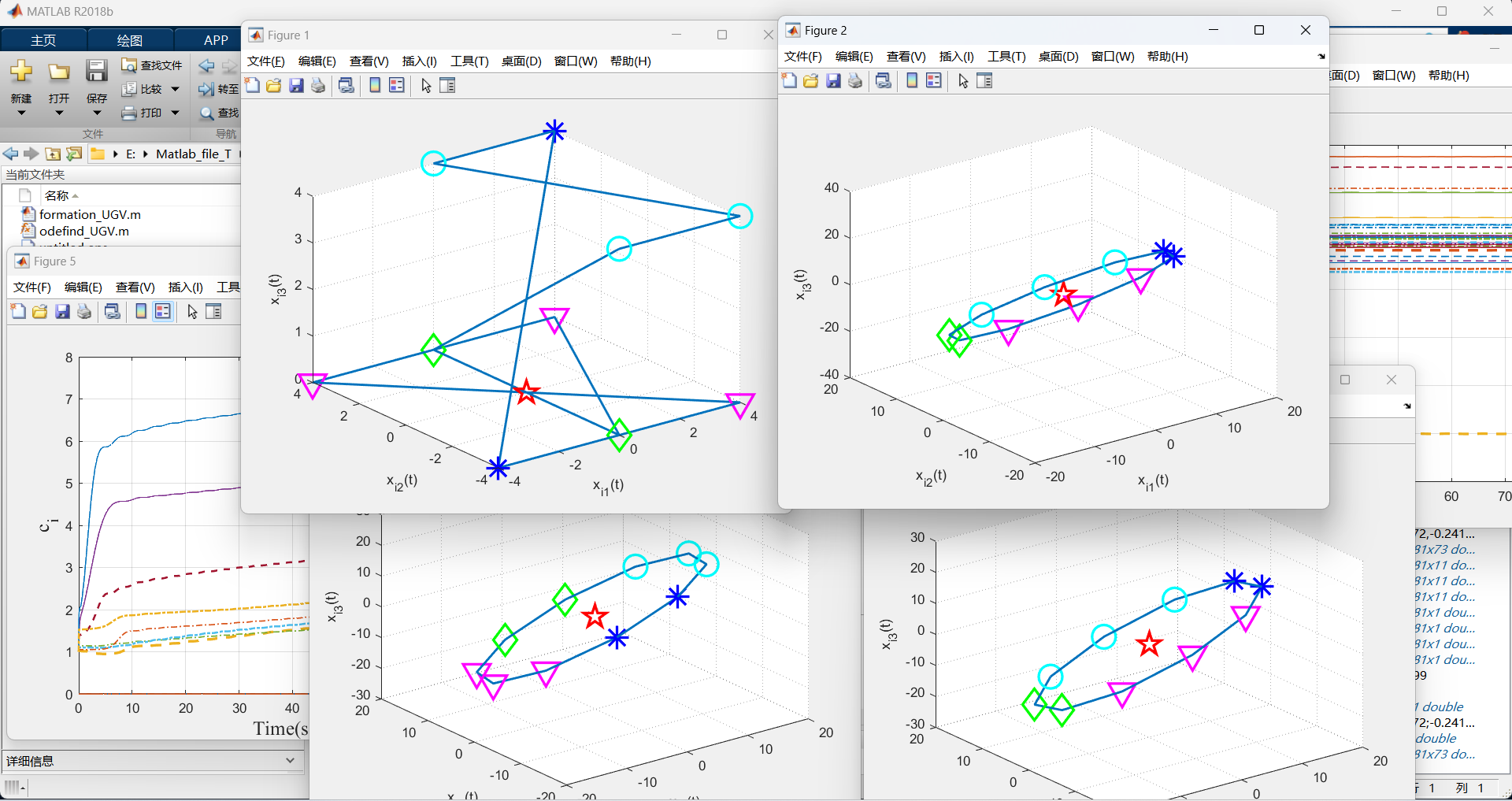
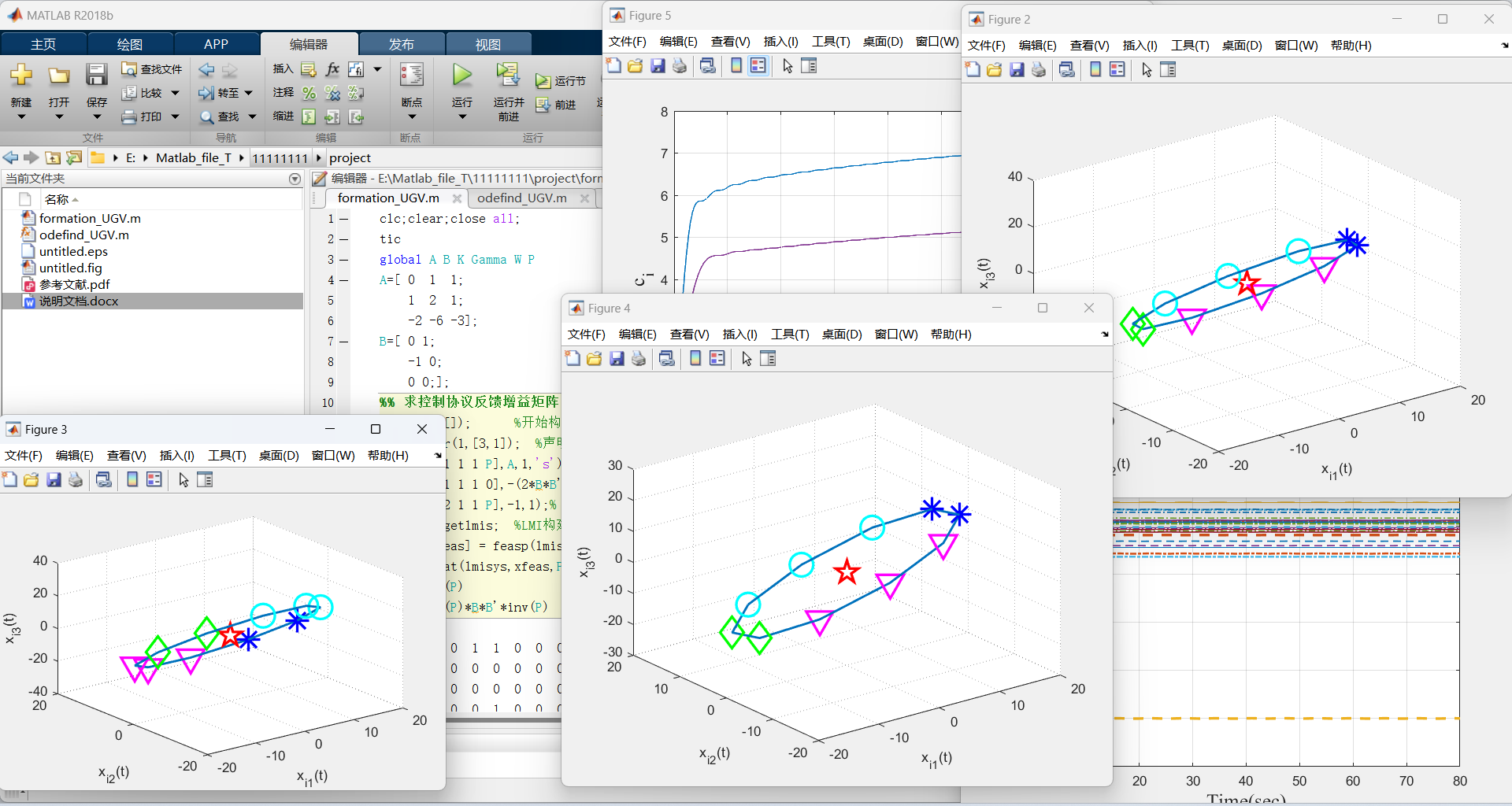
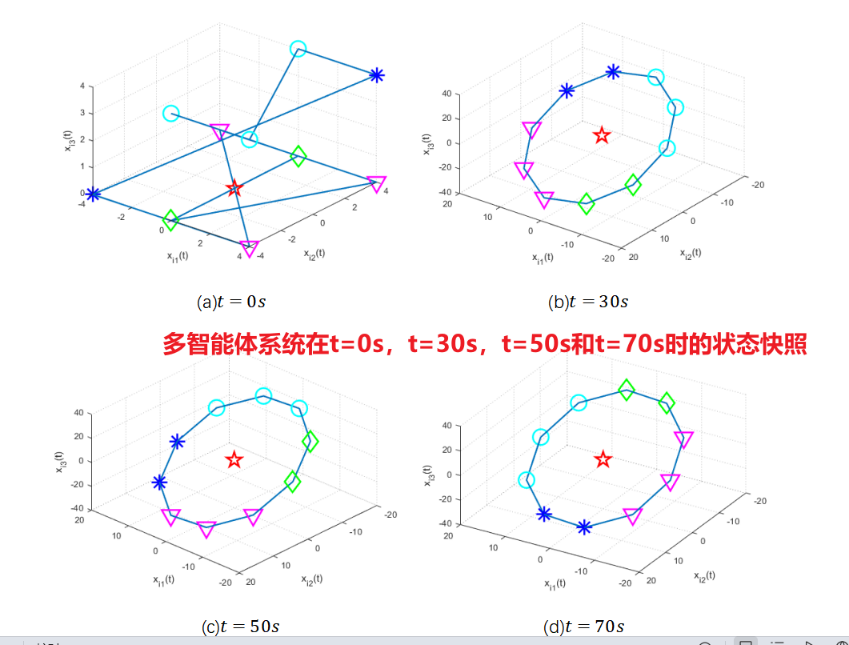
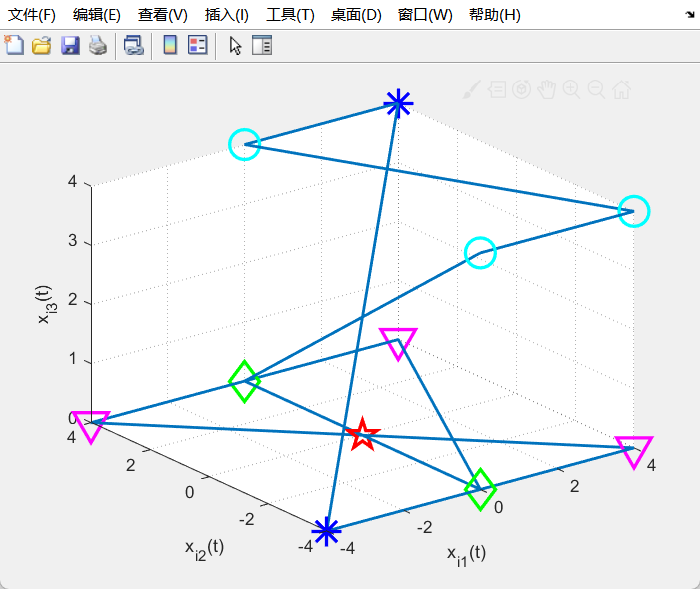
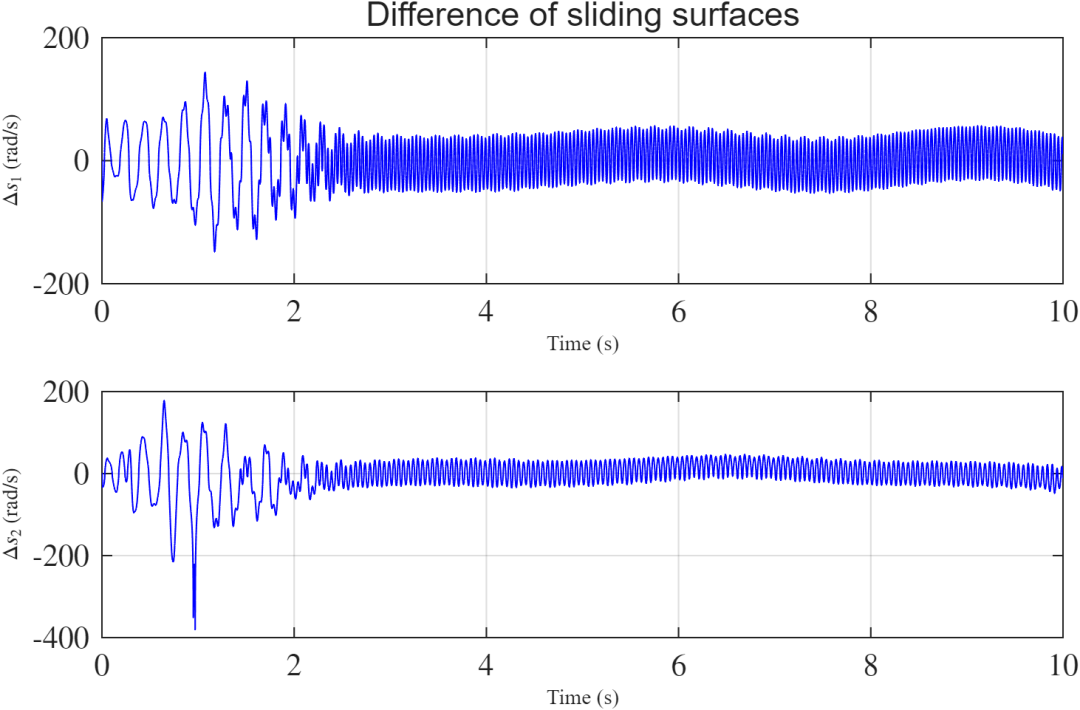
⛳️ 运行结果
![]()
📣 部分代码
![]()
🔗 参考文献
![]()
🍅往期回顾扫扫下方二维码

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 0
0 0
0- 0



 已为社区贡献185条内容
已为社区贡献185条内容

所有评论(0)