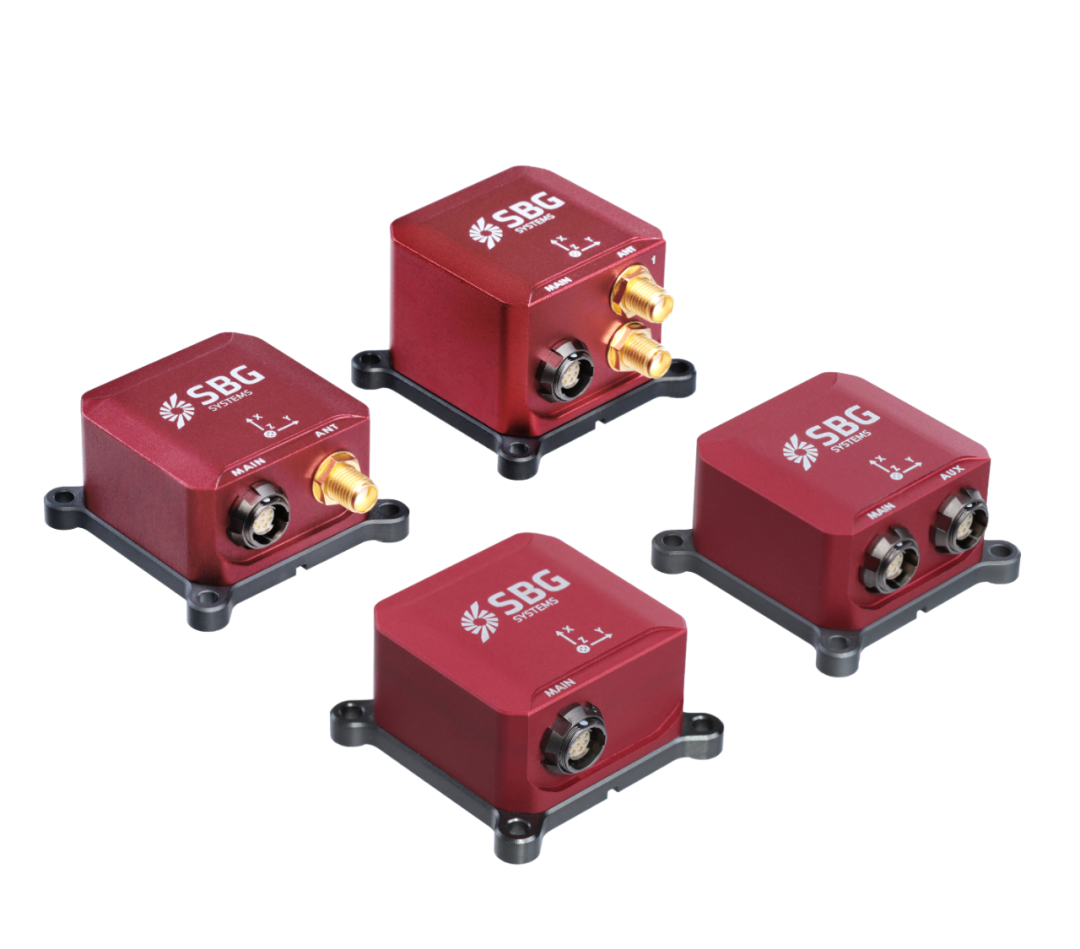
BG新的Ellipse 系列-BOX封装及OEM封装
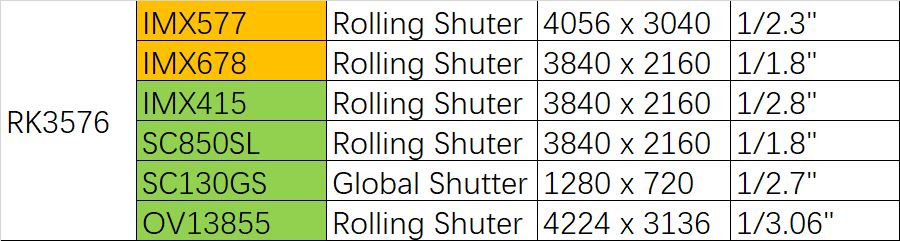
通感算控一体化AiBrainBox可选MIPI相机模块。
BG新的Ellipse 系列-BOX封装及OEM封装
Ellipse 系列概览
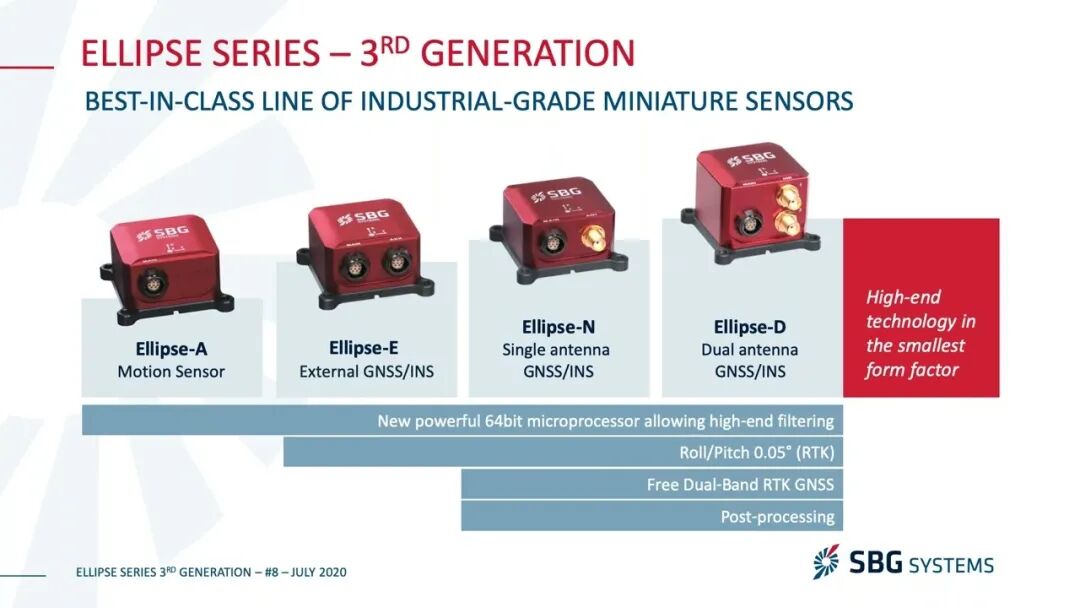
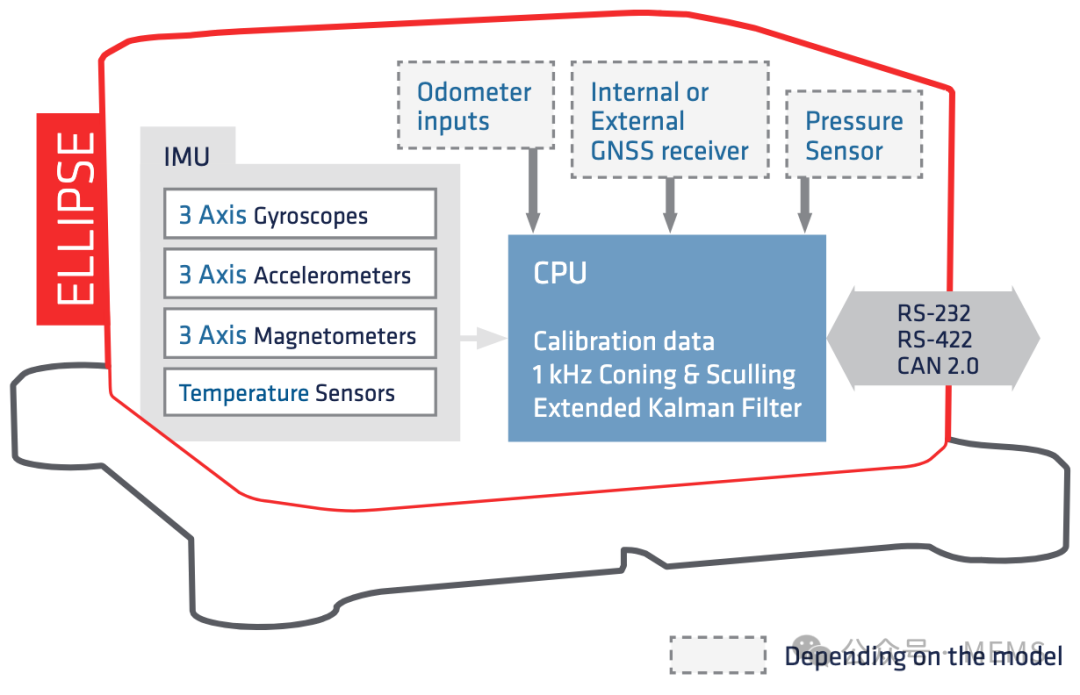
Ellipse 系列是 SBG Systems 提供的一整套基于微型 MEMS 的惯性导航和姿态参考系统(AHRS/INS),定位为紧凑、高性能、适合集成与研发的导航传感器。该系列主打小体积、高可靠性、高精度,并覆盖从基础姿态(AHRS)到带 GNSS 定位的完整导航功能。
核心设备类型
|
型号 |
功能层级 |
主要输出 |
|---|---|---|
| Ellipse-A |
AHRS |
姿态(滚转/俯仰/航向),升沉(Heave) |
| Ellipse-E |
INS + 外部 GNSS |
姿态 + 位置 + 速度 + 升沉 |
| Ellipse-N |
INS + 内置单天线 RTK |
姿态 + 高精度定位(RTK cm 级) |
| Ellipse-D |
INS + 内置双天线 RTK |
姿态 + 高精度定位 + 强抗磁干扰航向 |
所有型号都有 Boxed(标准产品)和 OEM(模块化集成)两种封装,供不同集成需求选择:前者适用快速部署与标准系统接入;后者更适合集成到客户平台(如无人机、机器人、OBC/SBC 设备等)。

📈 核心改进点
✔ 最新一代导航算法 — 更优滤波结构和误差融合能力
✔ 更高频率数据输出 — 尤其 IMU/导航数据最高可达 1 kHz
✔ 更强的 Heave 精度与稳定性 — 对波动及震动更鲁棒
✔ GNSS-Denied 环境的增强处理 — 支持微磁场干扰免疫和 GNSS 丢失回退到磁力计或辅助传感器输入
✔ 更丰富的配置接口 — 如 REST API、新的输出消息结构
✔ PointPerfect™ 修正服务兼容性 — 可实现 3-6 cm 的高精定位(需要 GNSS 以及相应服务订阅)
✔ 动态实时航位推算(Dead Reckoning)增强 — 即使在短期无 GNSS 环境仍能保持一定精度
📌 简而言之:New Ellipse 并不只是增加了“功能点”,而是使现有硬件在复杂动态环境和GNSS受限环境下表现出更稳定、更高精度的导航解决方案。
性能对比与选型建议
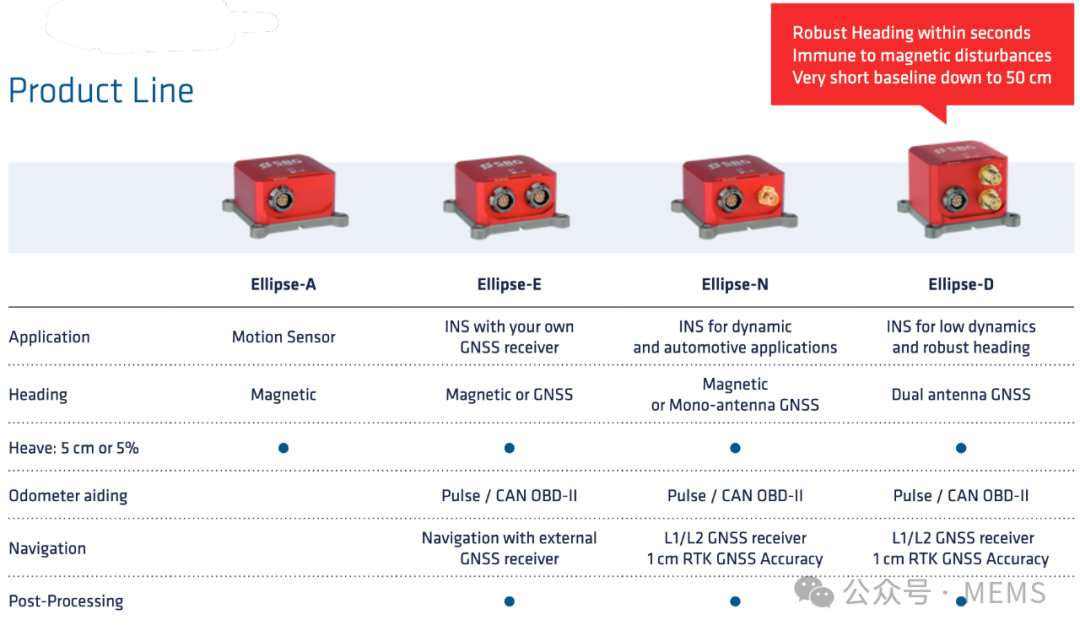
1. 精度与功能维度
|
型号 |
姿态精度 |
航向精度 |
定位精度 |
特殊优势 |
|---|---|---|---|---|
|
Ellipse-A |
~0.1° |
~0.8° |
— |
简洁 AHRS |
|
Ellipse-E |
~0.05° |
~0.2°* |
依赖外 GNSS |
最灵活 GNSS 接入 |
|
Ellipse-N |
~0.05° |
~0.2° RTK |
~1-2 cm RTK |
内置 RTK GNSS |
|
Ellipse-D |
~0.05° |
~0.2° RTK |
~1-2 cm RTK |
双天线稳定航向 |

Ellipse Micro AHRS具有最佳SWaP-C的运动和横摇传感器
Ellipse Micro AHRS 属于我们的 Ellipse Micro 系列,该系列是基于 MEMS 的超小型高性能惯性系统,可在微小且经济实惠的封装中实现卓越的定向和导航性能。
我们的 AHRS 版本是一种姿态和航向参考系统 (AHRS),可在动态条件下提供准确的定向。
它以最小和最经济的封装提供最高的精度。

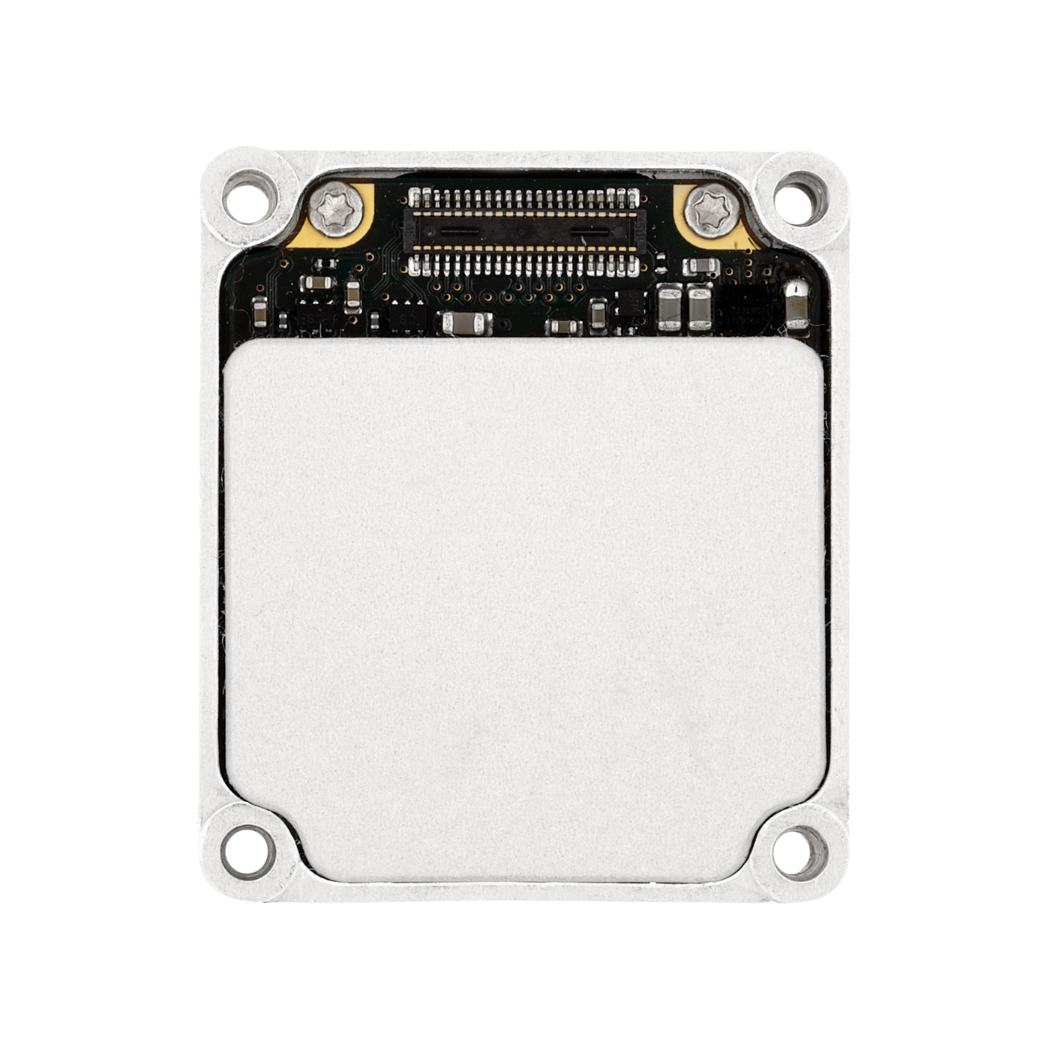
OEM 版本本质上是 Ellipse 系列的 “集成型模块”,与标准 Boxed 版本的主要差异不是性能本质,而是在“集成方式、接口和形态设计”上:
🧩 OEM 与 Boxed 的关键差异
|
特征 |
Boxed 版本 | OEM 版本 |
|---|---|---|
|
封装 |
IP68 工业小盒 |
紧凑裸板/基本金属外壳 |
|
连接方式 |
标准串口/电源线 |
LVTTL / MCU 集成更易 |
|
工程集成 |
快速部署 |
适合最终产品内嵌 |
|
重量/体积 |
较大 |
更轻更小 |
|
适用场景 |
快速测试与装载 |
大规模系统嵌入 |
|
定制化 |
限制较少 |
易于嵌入式软硬件整合 |
📊 换句话说,OEM 版并不是性能削减,而是接口 / 形态更灵活,便于开发者在自有平台上执行二次设计,尤其适合自主系统、无人驾驶、机器人导航单元等。

🧩 OEM 与 Boxed 的关键差异
|
特征 |
Boxed 版本 | OEM 版本 |
|---|---|---|
|
封装 |
IP68 工业小盒 |
紧凑裸板/基本金属外壳 |
|
连接方式 |
标准串口/电源线 |
LVTTL / MCU 集成更易 |
|
工程集成 |
快速部署 |
适合最终产品内嵌 |
|
重量/体积 |
较大 |
更轻更小 |
|
适用场景 |
快速测试与装载 |
大规模系统嵌入 |
|
定制化 |
限制较少 |
易于嵌入式软硬件整合 |
📊 换句话说,OEM 版并不是性能削减,而是接口 / 形态更灵活,便于开发者在自有平台上执行二次设计,尤其适合自主系统、无人驾驶、机器人导航单元等。
⚙️ 新 Ellipse 的价值主张
-
软件升级体验显著提升(无需硬件更换)
-
更高的算法性能和 GNSS 融合能力
-
更高数据频率更适合控制与滤波集成
-
更广泛的外部传感器输入支持(DVL、速度计等)
-
更强的 GNSS 抗干扰能力
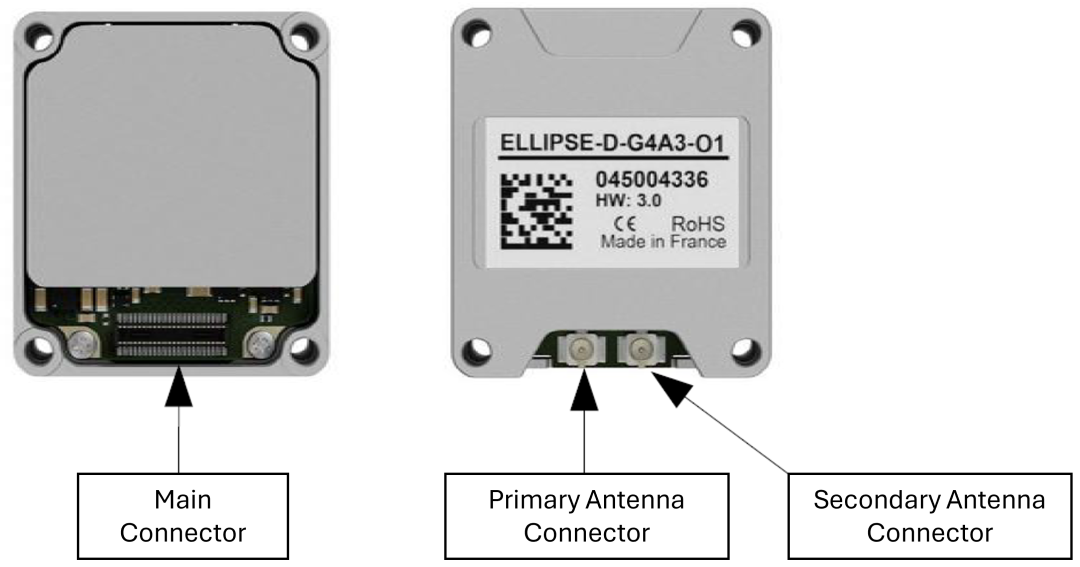
OEM Ellipse 的接口总览(先给结论)
接口类型一览表
|
接口类别 |
是否必选 |
用途 |
|---|---|---|
| 电源输入 |
✅ 必须 |
模块供电 |
| UART(串口) |
✅ 必须 |
主通信接口 |
| CAN |
⭕ 可选 |
车规 / 工业系统 |
| GPIO / Sync |
⭕ 可选 |
PPS、同步、触发 |
| GNSS 天线接口 |
视型号 |
RTK / GNSS |
| 外部 GNSS 数据口 |
E / D 型 |
外接接收机 |
| 调试 / Boot 接口 |
⭕ |
生产或维护 |
1️⃣ 电源接口(Power)
特点:非常“嵌入式友好”
-
供电电压:
-
+5 V DC(典型)
-
-
功耗:
-
约 1 ~ 2 W(随 GNSS / RTK 状态变化)
-
-
接口形式:
-
板对板 / 焊盘 / FPC(依 OEM 子型号)
-
📌 设计建议(重要):
-
必须 低噪声 LDO / DC-DC
-
IMU 对 电源纹波极其敏感
-
强烈建议:
IMU 单独电源域 + π 型滤波
2️⃣ UART 串口(最核心接口)
这是 OEM Ellipse 的主通信方式。
串口特性
-
电平:3.3 V TTL
-
波特率:最高可达 921600 bps
-
通道数:
-
通常 2~3 路 UART
-
-
数据内容:
-
姿态(Roll / Pitch / Yaw)
-
Heave
-
速度、位置
-
原始 IMU(Accel / Gyro)
-
状态量(GNSS、滤波器)
-
📌 在无人机中的典型用法:
-
UART1 → 飞控(姿态 / 导航)
-
UART2 → 上位机 / 记录
-
UART3 → 外部 GNSS(Ellipse-E)
3️⃣ CAN 接口(工业 / 车规友好)
-
类型:CAN 2.0B
-
速率:
-
125 kbps / 250 kbps / 500 kbps / 1 Mbps
-
-
特点:
-
抗干扰强
-
长线稳定
-
多节点
-
📌 适合场景:
-
AGV / 无人车
-
矿山 / 港口车辆
-
工业机器人
📌 对无人机的现实建议:
如果你系统已是 UART / Ethernet 架构,CAN 并非必需
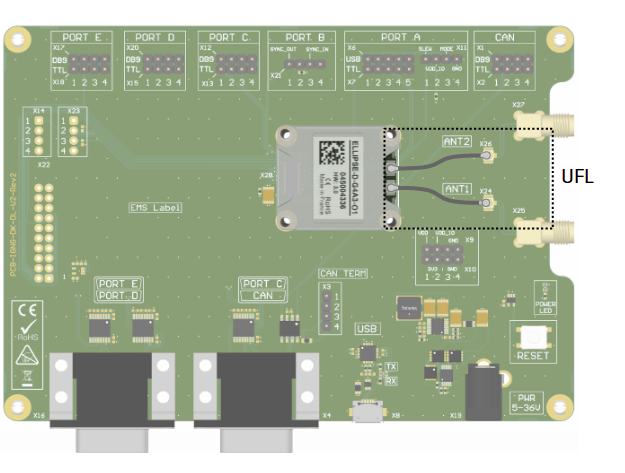
4️⃣ GNSS 接口(区分型号)
🔹 Ellipse-N / D(内置 GNSS)
-
接口:
-
RF 天线接口(U.FL / IPEX)
-
-
支持:
-
RTK
-
SBAS
-
PPP(如 PointPerfect)
-
📌 设计注意:
-
天线地平面
-
RF 隔离
-
远离 DC-DC、电机
🔹 Ellipse-E(外部 GNSS)
-
接口形式:
-
UART 输入 GNSS 原始数据
-
-
支持外部接收机:
-
u-blox
-
Septentrio
-
Trimble 等
-
📌 这一点对你很关键 👇
Ellipse-E = 最适合做“自定义 GNSS/INS 紧耦合”的 OEM 型号

通感算控一体化AiBrainBox
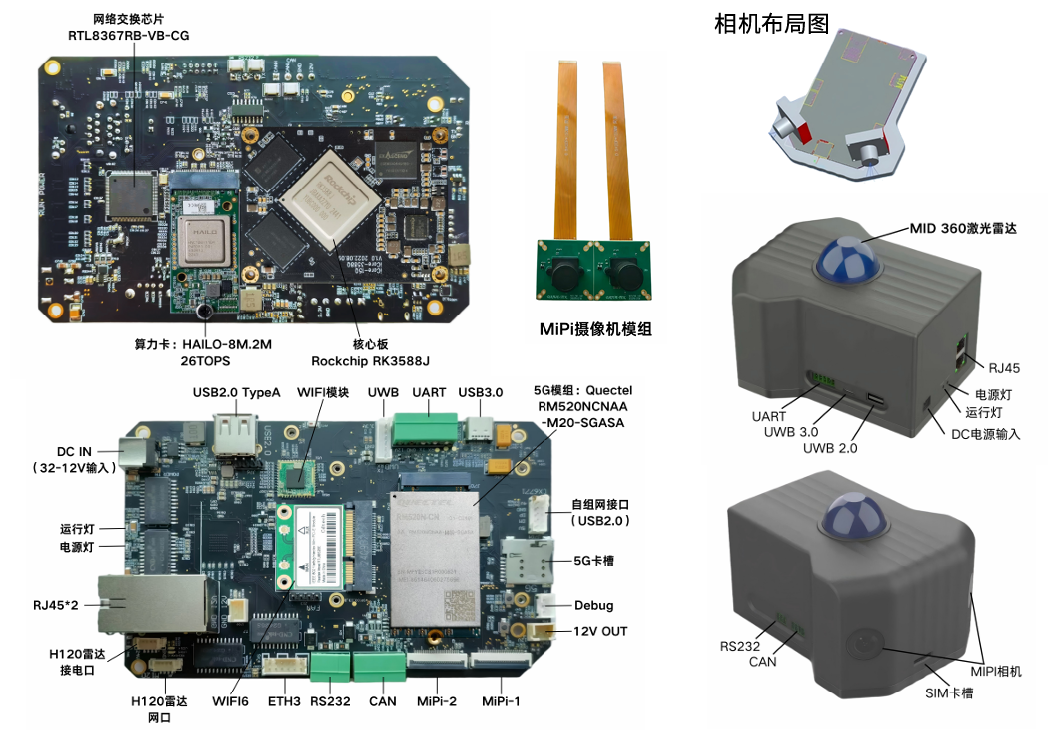
可选MIPI相机模块

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 3
3 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)