机器人操作系统演进之路
本文系统梳理了机器人操作系统(ROS)的技术演进与工业应用。从ROS1到ROS2的技术革命,重点分析了DDS通信中间件引入带来的分布式通信、实时性能和安全认证等关键突破。详细介绍了ROS-Industrial工业扩展、Open-RMF多机器人协同框架以及Gazebo到Ignition的数字孪生进化。通过智慧物流、智能制造等应用案例,展现了ROS生态如何从实验室走向工业现场。文章最后探讨了ROS与A
目录
1.1 ROS的起源:斯坦福与Willow Garage的远见
2.2 Cyclone DDS与Fast DDS:不同的哲学选择
3.1 功能安全认证:ISO 26262与IEC 61508
引言:机器人时代的操作系统革命
当我们谈论智能手机时,会想到iOS和Android;当谈论个人电脑时,会想到Windows和macOS。那么在机器人技术爆发的今天,机器人领域的"操作系统"是什么?答案就是——机器人操作系统(Robot Operating System,简称ROS)。但ROS远不止其名字所示的那么简单,它正在经历从学术研究工具到工业级平台的深刻转型,成为连接机器人世界各个角落的"数字神经网络"。
一、ROS的前世今生——从实验室到工业现场
1.1 ROS的起源:斯坦福与Willow Garage的远见
ROS的故事始于2007年,在斯坦福大学人工智能实验室的孵化下诞生。当时,机器人研究领域面临着一个普遍困境:每个研究团队都在重复"造轮子",开发自己的底层框架、通信协议和工具链。这种碎片化严重阻碍了机器人技术的进步。
Willow Garage公司看到了这一痛点,于2009年正式发布了ROS的早期版本。他们的愿景很明确:创建一个通用的机器人软件框架,让研究人员能够共享代码、算法和工具,就像开源软件改变了软件开发一样,ROS将改变机器人开发。
初代ROS采用发布/订阅模式,基于自定义的通信协议,提供了完整的工具链:
-
话题(Topic)和服务(Service)通信机制
-
包管理系统和构建系统
-
RViz可视化工具
-
Gazebo仿真环境
1.2 ROS 1的成功与局限
到2010年代中期,ROS 1已经成为机器人研究领域的事实标准。全球超过1000所大学和研究机构在使用ROS,催生了诸如PR2、TurtleBot等标志性机器人平台。然而,随着应用从实验室走向真实世界,ROS 1的局限性逐渐暴露:
- 通信瓶颈:基于TCP的自定义协议在大型系统中性能下降明显
- 实时性不足:缺乏确定的实时性能,无法满足工业控制需求
- 单机限制:分布式系统支持有限
- 安全性缺失:没有内置的安全机制
- 主节点单点故障:核心协调节点一旦崩溃,整个系统瘫痪
这些限制促使了ROS社区在2015年启动了ROS 2的开发,目标是构建一个生产就绪的机器人操作系统。
二、ROS 2的技术革命——DDS带来的范式转变
2.1 DDS:工业级通信中间件的引入
ROS 2最核心的变革是放弃了自有的通信协议,转而采用数据分发服务(Data Distribution Service,DDS) 这一成熟的工业标准。DDS是对象管理组织(OMG)制定的中间件协议和API标准,已经在国防、航空、医疗等领域应用了二十多年。
// ROS 2中基于DDS的节点创建示例
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
class MinimalPublisher : public rclcpp::Node {
public:
MinimalPublisher() : Node("minimal_publisher"), count_(0) {
// 创建发布者,使用DDS QoS配置
publisher_ = this->create_publisher<std_msgs::msg::String>(
"topic",
10, // 队列深度
rclcpp::QoS(rclcpp::KeepLast(10))
.reliability(RMW_QOS_POLICY_RELIABILITY_RELIABLE)
.durability(RMW_QOS_POLICY_DURABILITY_VOLATILE)
);
timer_ = this->create_wall_timer(
std::chrono::milliseconds(500),
std::bind(&MinimalPublisher::timer_callback, this));
}
private:
void timer_callback() {
auto message = std_msgs::msg::String();
message.data = "Hello, ROS 2 with DDS! " + std::to_string(count_++);
// DDS提供零拷贝发布能力
publisher_->publish(message);
}
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
size_t count_;
};DDS为ROS 2带来的关键能力:
- (1). 真正的分布式通信:去中心化的发现机制,无需主节点
- (2). 丰富的服务质量(QoS)策略:可配置可靠性、持久性、截止时间等
- (3). 安全通信:支持身份验证、加密和访问控制
- (4). 实时性能:确定性的数据传输延迟
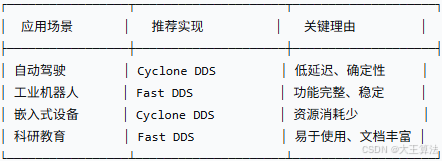
2.2 Cyclone DDS与Fast DDS:不同的哲学选择
ROS 2支持多种DDS实现,其中最主流的是Cyclone DDS和Fast DDS(原名Fast RTPS)。这两种实现代表了不同的设计哲学:
Cyclone DDS(Eclipse Foundation):
- 强调最小化和确定性
- 代码库小巧,适合资源受限的嵌入式系统
- 在自动驾驶领域广泛应用
- 采用真正的零拷贝架构
Fast DDS(eProsima):
- 提供最丰富的功能集
- 支持最完整的DDS规范
- 社区活跃,文档丰富
- 在工业机器人中应用广泛
2.3 实时性突破:rclc Executor的革新
实时性能是工业机器人的生命线。传统的ROS 2执行器在实时任务调度方面存在不足,为此,ROS 2社区开发了rclc Executor,专门为实时系统设计。
// rclc Executor实时任务调度示例
#include <rclc/rclc.h>
#include <rclc/executor.h>
// 定义实时回调函数
void timer_callback(rcl_timer_t *timer, int64_t last_call_time) {
(void) last_call_time;
if (timer != NULL) {
// 硬实时任务:必须在截止时间内完成
control_loop_update();
}
}
void subscription_callback(const void *msgin) {
// 软实时任务:尽量及时处理
process_sensor_data(msgin);
}
int main(int argc, const char *argv[]) {
rcl_allocator_t allocator = rcl_get_default_allocator();
// 创建支持实时性的执行器
rclc_executor_t executor;
rclc_executor_init(&executor, &support.context, 3, &allocator);
// 配置实时调度策略
rclc_executor_set_trigger(
&executor,
rclc_executor_trigger_always, // 触发策略
NULL
);
// 添加实时定时器(1kHz控制频率)
rclc_executor_add_timer(&executor, &timer);
// 添加订阅者
rclc_executor_add_subscription(
&executor,
&subscription,
&msg,
&subscription_callback,
ON_NEW_DATA
);
// 启动实时调度循环
while (true) {
rclc_executor_spin_some(&executor, RCL_MS_TO_NS(1)); // 1ms周期
// 此处可插入空闲任务或低优先级任务
}
return 0;
}rclc Executor的关键特性:
优先级调度:支持任务优先级管理
确定性执行:可预测的任务执行时间
内存预分配:避免动态内存分配导致的不可预测延迟
无锁设计:减少竞态条件
三、安全认证之路——从研究工具到工业产品
3.1 功能安全认证:ISO 26262与IEC 61508
要让ROS 2进入汽车、医疗、工业控制等安全关键领域,必须通过严格的功能安全认证。ROS 2技术指导委员会(TSC)正在积极推进相关认证工作:
ISO 26262(道路车辆功能安全):
- 适用于汽车自动驾驶系统
- 定义了ASIL(汽车安全完整性等级)A到D
- ROS 2目标:达到ASIL B/C级别
IEC 61508(电气/电子/可编程电子安全相关系统的功能安全):
- 通用工业安全标准
- 定义了SIL(安全完整性等级)1到4
- ROS 2目标:达到SIL 2级别
3.2 安全认证的挑战与策略
ROS 2作为开源软件,获得安全认证面临独特挑战:
(1). 代码库规模庞大:需要建立安全的子集
(2). 动态特性丰富:需要静态分析和形式化验证
(3). 社区开发模式:需要严格的质量保证流程
ROS 2的认证策略:
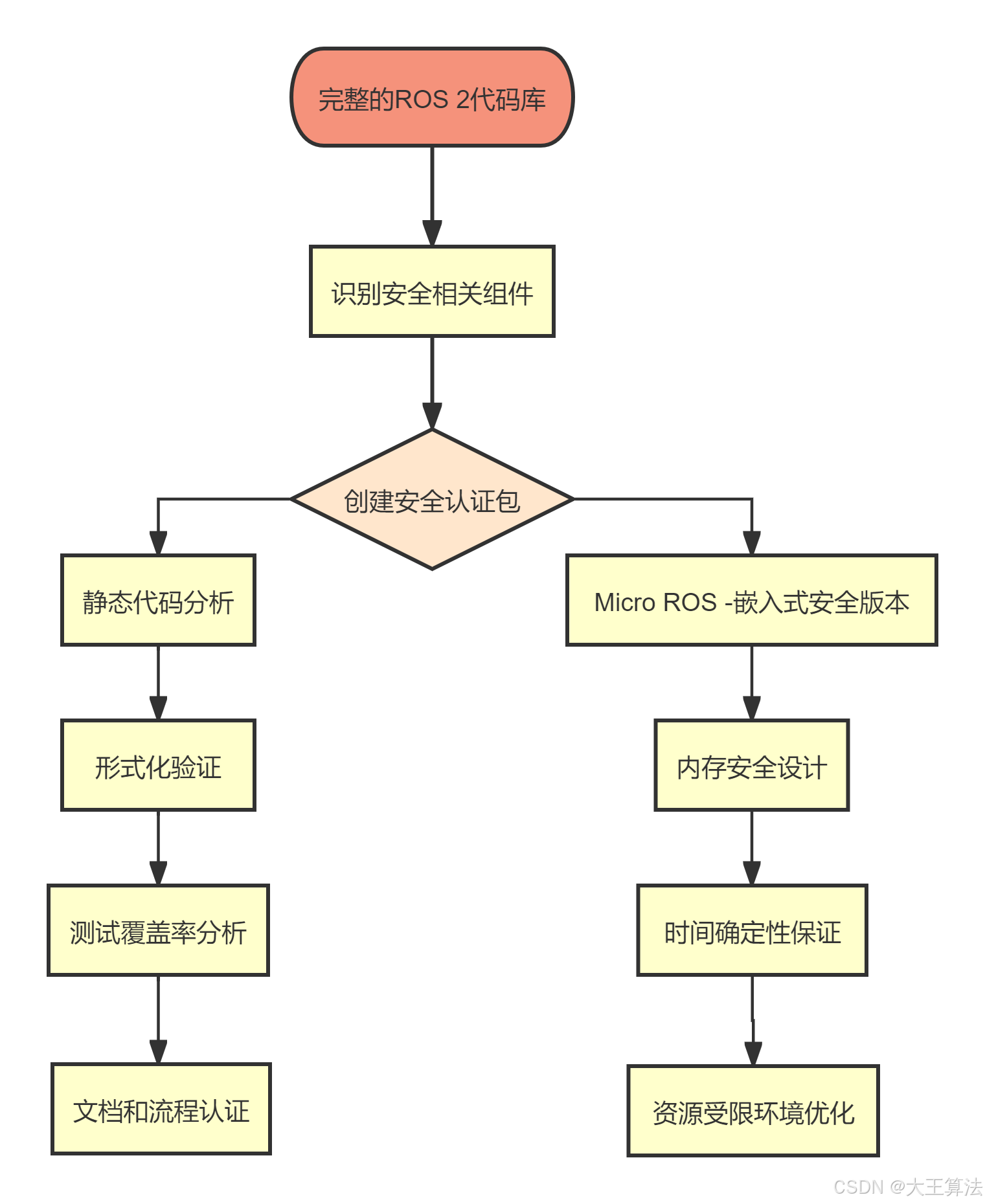
3.3 Micro ROS:嵌入式安全解决方案
针对安全关键的嵌入式应用,ROS社区推出了Micro ROS,它是ROS 2的精简版,专门为微控制器设计:
-
内存占用小:最低配置仅需约50KB RAM和200KB Flash
-
实时确定性:专为实时操作系统(RTOS)优化
-
安全特性:内置内存保护、看门狗等安全机制
// Micro ROS在安全关键应用中的使用
#include <microros_app.h>
// 安全监控任务
void safety_monitor_task(void *arg) {
SafetyContext *ctx = (SafetyContext *)arg;
while (1) {
// 检查系统状态
if (!check_system_health(ctx)) {
// 触发安全状态
enter_safe_state();
break;
}
// 监控通信健康
if (communication_timeout_detected()) {
// 启用冗余通信通道
switch_to_backup_channel();
}
osDelay(10); // 10ms监控周期
}
}
// 主安全控制循环
void safety_control_loop(void) {
// 初始化安全硬件
safety_hardware_init();
// 创建Micro ROS节点
rcl_node_t node = rcl_get_zero_initialized_node();
rclc_node_init_default(&node, "safety_controller", "", &support);
// 配置安全相关的QoS策略
rmw_qos_profile_t safety_qos = rmw_qos_profile_default;
safety_qos.reliability = RMW_QOS_POLICY_RELIABILITY_RELIABLE;
safety_qos.deadline.sec = 0;
safety_qos.deadline.nsec = 10000000; // 10ms截止时间
// 创建安全话题
rcl_publisher_t emergency_pub;
rclc_publisher_init_default(
&emergency_pub,
&node,
ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Bool),
"emergency_stop",
&safety_qos
);
}四、工业扩展——ROS-Industrial打通IT与OT
4.1 OPC UA与Modbus:工业通信标准集成
ROS-Industrial项目将ROS生态扩展到传统工业自动化领域,关键是通过OPC UA和Modbus协议与工业控制系统集成。
OPC UA(开放平台通信统一架构):
-
工业4.0的核心通信标准
-
提供语义互操作性
-
支持信息安全机制
# ROS 2与OPC UA服务器集成示例
import rclpy
from rclpy.node import Node
from opcua import Client
from std_msgs.msg import Float32
class OPCUABridge(Node):
def __init__(self):
super().__init__('opcua_bridge')
# 连接到OPC UA服务器(如西门子S7-1500 PLC)
self.opcua_client = Client("opc.tcp://192.168.1.100:4840")
self.opcua_client.connect()
# 订阅ROS 2话题
self.subscription = self.create_subscription(
Float32,
'setpoint',
self.setpoint_callback,
10
)
# 发布到ROS 2话题
self.publisher = self.create_publisher(Float32, 'process_value', 10)
# 定时读取PLC数据
self.timer = self.create_timer(0.1, self.read_plc_data) # 10Hz
def setpoint_callback(self, msg):
"""将ROS 2设定值写入PLC"""
try:
# 获取OPC UA节点
setpoint_node = self.opcua_client.get_node("ns=3;s=Temperature.Setpoint")
# 写入设定值
setpoint_node.set_value(float(msg.data))
self.get_logger().info(f"Setpoint written to PLC: {msg.data}")
except Exception as e:
self.get_logger().error(f"Failed to write to PLC: {e}")
def read_plc_data(self):
"""从PLC读取过程值并发布到ROS 2"""
try:
# 读取过程值
pv_node = self.opcua_client.get_node("ns=3;s=Temperature.ProcessValue")
process_value = pv_node.get_value()
# 发布到ROS 2
msg = Float32()
msg.data = float(process_value)
self.publisher.publish(msg)
except Exception as e:
self.get_logger().error(f"Failed to read from PLC: {e}")
# Modbus RTU集成(适用于传统设备)
from pymodbus.client import ModbusSerialClient
class ModbusBridge:
def __init__(self, port='/dev/ttyUSB0', baudrate=9600):
self.client = ModbusSerialClient(
port=port,
baudrate=baudrate,
bytesize=8,
parity='N',
stopbits=1,
timeout=1
)
self.client.connect()
def read_holding_registers(self, address, count, slave_id=1):
"""读取保持寄存器(如温度、压力值)"""
response = self.client.read_holding_registers(
address=address,
count=count,
slave=slave_id
)
if not response.isError():
return response.registers
else:
raise Exception(f"Modbus read error: {response}")
def write_register(self, address, value, slave_id=1):
"""写入单个寄存器(如控制命令)"""
response = self.client.write_register(
address=address,
value=value,
slave=slave_id
)
if response.isError():
raise Exception(f"Modbus write error: {response}")4.2 工业机器人运动控制
ROS-Industrial提供了一系列工业机器人驱动器包:
# 工业机器人配置示例(YAML格式)
robot_description:
name: "ur10e"
manufacturer: "Universal Robots"
model: "UR10e"
# 运动学参数
kinematics:
type: "urdf"
file: "package://ur_description/urdf/ur10e.urdf"
# 控制器配置
controllers:
joint_trajectory_controller:
type: "position_controllers/JointTrajectoryController"
joints: ["shoulder_pan_joint", "shoulder_lift_joint", "elbow_joint",
"wrist_1_joint", "wrist_2_joint", "wrist_3_joint"]
constraints:
goal_time: 0.5
stopped_velocity_tolerance: 0.01
# 安全配置
safety:
joint_limits:
- joint: "shoulder_pan_joint"
min: -6.28318530718 # -360度
max: 6.28318530718 # 360度
velocity: 3.14159265359 # 180度/秒
# 工具坐标系配置
tool_frames:
tool0:
translation: [0, 0, 0.1]
rotation: [0, 0, 0, 1]五、Open-RMF——机器人互操作框架的革命
5.1 多机器人系统协同的挑战
在仓库、医院、工厂等场景中,往往需要多种不同类型的机器人协同工作:
AGV(自动导引车):负责物料搬运
AMR(自主移动机器人):灵活导航和执行任务
机械臂:执行精确操作
电梯、自动门等基础设施
传统上,这些系统各自为政,形成"自动化孤岛"。Open-RMF的目标就是打破这些孤岛。
5.2 Open-RMF架构解析
Open-RMF采用微服务架构,核心组件包括:
# Open-RMF核心概念示例
import rmf_api_msgs.srv as rmf_srv
import rclpy
from rclpy.node import Node
class FleetManager(Node):
"""车队管理器:协调多个机器人"""
def __init__(self, fleet_name):
super().__init__(f'{fleet_name}_fleet_manager')
self.fleet_name = fleet_name
self.robots = {} # 机器人状态字典
# 提供服务:任务分配
self.task_service = self.create_service(
rmf_srv.TaskRequest,
f'/{fleet_name}/request_task',
self.handle_task_request
)
# 发布车队状态
self.fleet_state_pub = self.create_publisher(
rmf_srv.FleetState,
f'/{fleet_name}/fleet_state',
10
)
def handle_task_request(self, request, response):
"""处理任务请求,使用市场拍卖机制分配任务"""
task = request.task
# 收集所有可用机器人的投标
bids = []
for robot_id, robot in self.robots.items():
if robot.state == "idle" and robot.can_perform_task(task):
# 计算投标价格(基于距离、电池、能力等)
bid_price = self.calculate_bid(robot, task)
bids.append({
'robot_id': robot_id,
'price': bid_price,
'estimated_completion_time': self.estimate_time(robot, task)
})
# 选择最优投标(最小价格或最快完成时间)
if bids:
winning_bid = min(bids, key=lambda x: x['price'])
assigned_robot = winning_bid['robot_id']
# 分配任务
self.assign_task_to_robot(assigned_robot, task)
response.success = True
response.robot_id = assigned_robot
else:
response.success = False
response.message = "No available robots for this task"
return response
def calculate_bid(self, robot, task):
"""计算投标价格 - 基于市场拍卖机制"""
base_price = 100
# 距离成本
distance_cost = self.calculate_distance(robot.position, task.start_location) * 2
# 电池成本(鼓励使用电量充足的机器人)
battery_cost = (100 - robot.battery_level) * 0.5
# 能力匹配成本(特殊技能溢价)
skill_cost = 0
if task.requires_special_skill and robot.has_skill(task.required_skill):
skill_cost = -50 # 拥有所需技能可获得折扣
# 历史负载均衡(避免某些机器人过载)
load_balance_cost = robot.completed_tasks * 1.2
total_cost = base_price + distance_cost + battery_cost + skill_cost + load_balance_cost
return total_cost
class TrafficManager(Node):
"""交通管理器:防止机器人碰撞,优化全局路径"""
def __init__(self):
super().__init__('traffic_manager')
# 构建交通图
self.traffic_graph = self.build_navigation_graph()
# 实时路径规划服务
self.path_planning_service = self.create_service(
rmf_srv.PathRequest,
'/request_path',
self.plan_path
)
# 冲突检测和解决
self.conflict_resolution_timer = self.create_timer(
1.0, # 1Hz冲突检测
self.detect_and_resolve_conflicts
)
def plan_path(self, request, response):
"""为机器人规划无碰撞路径"""
start = request.start
goal = request.goal
robot_id = request.robot_id
# 获取当前所有机器人的位置和路径
occupied_positions = self.get_all_occupied_positions(robot_id)
# 使用时空A*算法规划路径
path = self.spatiotemporal_a_star(
self.traffic_graph,
start,
goal,
occupied_positions,
time_window=request.time_window
)
if path:
response.path = path
response.success = True
else:
response.success = False
response.message = "No collision-free path found within time window"
return response
def detect_and_resolve_conflicts(self):
"""检测和解决机器人之间的冲突"""
# 获取所有机器人的预测路径
predicted_paths = self.get_predicted_paths()
# 检测潜在冲突
conflicts = self.find_conflicts(predicted_paths)
for conflict in conflicts:
# 解决策略:优先级、重新规划、速度调节
resolution = self.resolve_conflict(conflict)
# 通知相关机器人调整
self.notify_robots(resolution)5.3 市场拍卖机制在路径规划中的应用
Open-RMF的创新之一是引入基于市场拍卖的多机器人任务分配机制。这不仅仅是技术上的优化,更是经济学原理在机器人调度中的应用:
拍卖机制的工作流程:
- (1). 任务发布:中央调度系统发布任务需求
- (2). 投标阶段:每个机器人根据自身状态计算投标价格
- (3). 评标阶段:调度系统评估所有投标
- (4). 授标阶段:选择最优机器人执行任务
- (5). 执行监控:实时监控任务执行,支持重新调度
优势分析:
- 分布式决策:每个机器人自主决策,系统更健壮
- 负载均衡:自然实现机器人工作量的均衡分配
- 适应性:动态环境中的实时调整能力
- 公平性:明确的成本计算和分配机制
六、数字孪生——Gazebo到Ignition的进化
6.1 Gazebo的遗产与局限
Gazebo作为ROS的默认仿真工具已有十多年历史,它提供了:
-
物理精确的仿真
-
传感器模拟
-
环境建模
但随着需求增长,Gazebo的架构限制逐渐显现:
-
单一进程架构,扩展性有限
-
图形渲染能力不足
-
分布式仿真支持不够
6.2 Ignition Gazebo:下一代仿真平台
Ignition Gazebo(现更名为Gazebo Sim)是全新的仿真平台,采用组件化、分布式架构:
<!-- Ignition仿真世界文件示例 -->
<?xml version="1.0" ?>
<sdf version="1.8">
<world name="smart_factory">
<!-- 物理引擎配置 -->
<physics name="bullet_physics" type="bullet">
<max_step_size>0.001</max_step_size>
<real_time_factor>1.0</real_time_factor>
<real_time_update_rate>1000</real_time_update_rate>
</physics>
<!-- 环境光照 -->
<include>
<uri>model://sun</uri>
</include>
<!-- 工厂布局 -->
<model name="factory_layout">
<include>
<uri>model://conveyor_belt</uri>
<pose>2 0 0 0 0 0</pose>
</include>
<include>
<uri>model://storage_rack</uri>
<pose>-2 0 0 0 0 0</pose>
</include>
</model>
<!-- 多机器人系统 -->
<model name="robot_fleet">
<!-- AGV -->
<include>
<uri>model://agv_platform</uri>
<name>agv_001</name>
<pose>0 0 0.1 0 0 0</pose>
</include>
<!-- 机械臂 -->
<include>
<uri>model://industrial_arm</uri>
<name>arm_001</name>
<pose>2 1 0.5 0 0 0</pose>
</include>
</model>
<!-- 传感器网络 -->
<model name="sensor_network">
<include>
<uri>model://lidar_sensor</uri>
<pose>5 0 2 0 0 0</pose>
</include>
<include>
<uri>model://camera</uri>
<pose>0 5 3 0 1.57 0</pose>
</include>
</model>
<!-- 仿真插件 -->
<plugin name="ros2_bridge" filename="libign_ros2_bridge.so">
<topic>/clock</topic>
<topic>/tf</topic>
<topic>/scan</topic>
<topic>/camera/image</topic>
</plugin>
</world>
</sdf>6.3 高精度数字孪生系统
现代数字孪生不仅仅是几何仿真,而是物理、行为和数据的全面映射:
# 数字孪生同步系统
import numpy as np
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Pose, Twist
from sensor_msgs.msg import LaserScan, Image
import ignition.msgs as ign_msgs
class DigitalTwinSync(Node):
"""物理世界与数字孪生的实时同步"""
def __init__(self):
super().__init__('digital_twin_sync')
# 物理世界数据订阅
self.physical_pose_sub = self.create_subscription(
Pose,
'/physical/robot/pose',
self.physical_pose_callback,
10
)
self.physical_lidar_sub = self.create_subscription(
LaserScan,
'/physical/robot/lidar',
self.physical_lidar_callback,
10
)
# 数字孪生控制
self.digital_control_pub = self.create_publisher(
Twist,
'/digital/robot/cmd_vel',
10
)
# 同步状态
self.sync_state = {
'pose_error': 0.0,
'last_sync_time': self.get_clock().now(),
'sync_frequency': 100.0, # Hz
'max_allowed_error': 0.01 # 米
}
# 卡尔曼滤波器用于状态估计
self.kalman_filter = self.init_kalman_filter()
# 差异检测定时器
self.drift_detection_timer = self.create_timer(
1.0, # 1Hz漂移检测
self.detect_drift
)
def physical_pose_callback(self, msg):
"""物理世界位姿更新"""
physical_pose = self.pose_msg_to_numpy(msg)
# 预测数字孪生状态
predicted_digital_pose = self.kalman_filter.predict()
# 更新卡尔曼滤波器
self.kalman_filter.update(physical_pose)
# 计算误差
error = np.linalg.norm(physical_pose - predicted_digital_pose)
self.sync_state['pose_error'] = error
# 如果误差过大,重新同步
if error > self.sync_state['max_allowed_error']:
self.resynchronize(physical_pose)
# 发布同步状态
self.publish_sync_status()
def detect_drift(self):
"""检测物理世界与数字孪生的漂移"""
current_time = self.get_clock().now()
time_diff = current_time - self.sync_state['last_sync_time']
if time_diff.nanoseconds > 1e9: # 超过1秒
avg_error = self.calculate_average_error()
if avg_error > self.sync_state['max_allowed_error'] * 2:
self.get_logger().warning(
f"Significant drift detected: {avg_error:.4f}m. "
"Initiating re-synchronization..."
)
# 触发重新同步程序
self.initiate_full_resync()
def initiate_full_resync(self):
"""完全重新同步数字孪生"""
# 步骤1:暂停数字孪生仿真
self.pause_digital_twin()
# 步骤2:获取物理世界完整状态
physical_state = self.acquire_physical_state()
# 步骤3:重置数字孪生到物理世界状态
self.reset_digital_twin(physical_state)
# 步骤4:重新校准传感器模型
self.recalibrate_sensor_models()
# 步骤5:恢复仿真
self.resume_digital_twin()
self.get_logger().info("Full re-synchronization completed")
# 更新同步时间
self.sync_state['last_sync_time'] = self.get_clock().now()6.4 仿真在机器人开发流程中的角色
现代机器人开发中,仿真已经贯穿整个生命周期:
开发阶段 仿真用途 工具
----------- -------------------------------- ----------------
需求分析 • 工作空间验证 • Ignition Gazebo
• 任务可行性分析 • CAD导入工具
原型设计 • 机械结构验证 • Fusion 360
• 运动学仿真 • MoveIt 2
• 控制算法开发 • ROS 2 Control
算法开发 • 感知算法测试 • GPU加速仿真
• SLAM算法验证 • 定制传感器模型
• 路径规划优化 • 交通流仿真
系统集成 • 多机器人协同 • Open-RMF
• 人机交互测试 • VR/AR集成
• 异常情况处理 • 故障注入测试
部署验证 • 数字孪生验证 • 硬件在环
• 性能基准测试 • 指标收集系统
• 安全验证 • 形式化验证
运维优化 • 预测性维护 • AI异常检测
• 系统优化 • A/B测试框架
• 操作员培训 • 虚拟培训系统七、行业应用与未来展望
7.1 行业应用案例
智慧物流:
-
亚马逊仓库:数千台AMR协同作业
-
DHL供应链中心:混合车队管理系统
-
顺丰分拣中心:AI视觉+机器人分拣
智能制造:
-
特斯拉工厂:全自动化生产线
-
西门子数字工厂:数字孪生生产优化
-
富士康无灯工厂:24小时不间断生产
医疗服务:
-
达芬奇手术机器人:精密手术辅助
-
医院物流机器人:药品、标本自动运输
-
消毒机器人:自主导航紫外线消毒
农业自动化:
-
自动收割机器人:计算机视觉识别成熟度
-
无人机植保:精准喷洒系统
-
温室管理机器人:环境监控与调节
7.2 技术发展趋势
AI与ROS的深度融合:
# ROS 2与AI框架集成示例
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import Image
from cv_bridge import CvBridge
import torch
import torchvision.transforms as transforms
class AIEnhancedPerception(Node):
"""AI增强的感知系统"""
def __init__(self):
super().__init__('ai_perception')
# 加载AI模型
self.device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
self.model = self.load_pretrained_model('yolov7').to(self.device)
self.model.eval()
# ROS 2接口
self.image_sub = self.create_subscription(
Image,
'/camera/image_raw',
self.image_callback,
10
)
self.detection_pub = self.create_publisher(
DetectionArray,
'/detections',
10
)
self.bridge = CvBridge()
self.transform = transforms.Compose([
transforms.ToTensor(),
transforms.Resize((640, 640)),
transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
])
def image_callback(self, msg):
"""处理图像并进行AI推理"""
# 转换图像格式
cv_image = self.bridge.imgmsg_to_cv2(msg, 'bgr8')
# 预处理
input_tensor = self.transform(cv_image).unsqueeze(0).to(self.device)
# AI推理(使用TensorRT加速)
with torch.no_grad():
predictions = self.model(input_tensor)
# 后处理
detections = self.post_process(predictions)
# 发布检测结果
detection_msg = self.detections_to_msg(detections, msg.header)
self.detection_pub.publish(detection_msg)
# 边缘计算:如果检测到异常,本地立即响应
if self.detect_anomaly(detections):
self.trigger_emergency_response()5G与边缘计算:
- * 低延迟远程控制
- * 分布式边缘智能
- * 云-边-端协同计算
标准化与互操作性:
- * ROS 2与自动驾驶标准(Autoware、Apollo)集成
- * 工业4.0标准对接
- * 跨平台兼容性增强
7.3 面临的挑战
技术挑战:
- 实时性能的进一步提升
- 大规模系统的一致性管理
- 安全认证的全面覆盖
生态挑战:
- 开源与商业化的平衡
- 碎片化与标准化的矛盾
- 人才培养与社区建设
社会挑战:
- 人机协作的安全与伦理
- 工作岗位的转型
- 数据隐私与安全
八、总结
从斯坦福大学的实验室项目,到如今支撑全球机器人创新的基础设施,ROS的演进之路反映了整个机器人行业的发展轨迹。ROS 2及其相关生态系统的成熟,标志着机器人技术正在从"能用"向"好用"、"可靠"、"安全"的方向迈进。
关键转变总结:
- (1). 通信架构:从自定义协议到工业标准DDS
- (2). 实时性能:从软实时到硬实时支持
- (3). 安全认证:从研究工具到安全关键系统
- (4). 工业集成:从学术研究到工业现场
- (5). 系统规模:从单机到大规模分布式系统
- (6). 仿真能力:从简单模拟到高精度数字孪生
ROS的成功不仅仅是技术的成功,更是开源协作模式的成功。全球数千名开发者、数百家公司的共同贡献,创造了一个繁荣的机器人生态系统。随着人工智能、5G、边缘计算等技术的发展,ROS将继续演进,成为连接物理世界与数字世界的核心桥梁。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 1
1 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)