城市道路设施及道路安全隐患数据集(13000张图片已划分、已标注)| AI训练适用于目标检测任务
本城市道路设施及道路安全隐患目标检测数据集围绕实际工程场景构建,兼顾数据规模、类别实用性与标注规范性,具备较强的训练价值与落地意义。数据集覆盖井盖、开启井盖、坑洞、减速带及无标识减速带五类关键目标,不仅包含常规道路设施,还特别强调高风险安全隐患类别,使其在智慧城市管理、道路巡检系统、智能交通系统以及自动驾驶环境感知等方向具备更高的应用价值。
城市道路设施及道路安全隐患数据集(13000张图片已划分、已标注)| AI训练适用于目标检测任务
一、项目背景
随着智慧城市与智能交通系统(ITS)的快速发展,城市道路的精细化管理成为基础设施建设中的关键课题。井盖缺失、井盖开启、路面坑洞、无标识减速带等问题,不仅影响道路通行质量,还可能引发交通事故。
在自动驾驶、智能巡检车、无人机道路巡检等应用场景中,对道路设施及安全隐患进行实时目标检测与识别,已成为核心技术模块之一。
然而,当前公开可用的道路隐患类数据集相对较少,且类别单一、标注不规范或缺乏完整的数据划分。因此,本数据集围绕城市道路设施与安全隐患目标检测构建,具备:
- 多类别
- 标注规范
- 数据量充足
- 已完成标准划分
- 可直接用于YOLO系列训练
为科研与工程应用提供高质量数据支持。
数据集下载
链接:https://pan.baidu.com/s/1zYLg1EOwHB-HTBlxQr4w7A?pwd=yhmd
提取码:yhmd
数据集说明
道路设施目标检测数据集介绍
本数据集专注于城市道路设施及道路安全隐患的目标检测任务,涵盖常见的井盖、道路坑洞及减速带等设施类型。数据集共包含 约13,000张高质量图像,按训练、验证和测试集划分如下:
训练集(train/images):用于模型训练
验证集(valid/images):用于模型调参与验证
测试集(test/images):用于模型性能评估
数据集包含 5个类别:
井盖(Manhole)
打开的井盖(Open Manhole)
坑洞(Pothole)
减速带(Speed Bump)
无标识减速带(Unmarked Bump)
所有图像均标注了目标的边界框信息,可直接用于目标检测模型(如YOLO系列、Faster R-CNN等)训练与评估。数据集可用于城市道路设施检测、道路安全巡检、智能交通系统及自动驾驶环境感知等研究与应用,为提升城市道路安全和交通管理智能化提供数据支持。
二、数据集概述
本数据集共包含 约13,000张高质量图像,覆盖多种城市道路场景(白天、阴天、不同角度、不同距离等),具有较强的泛化能力。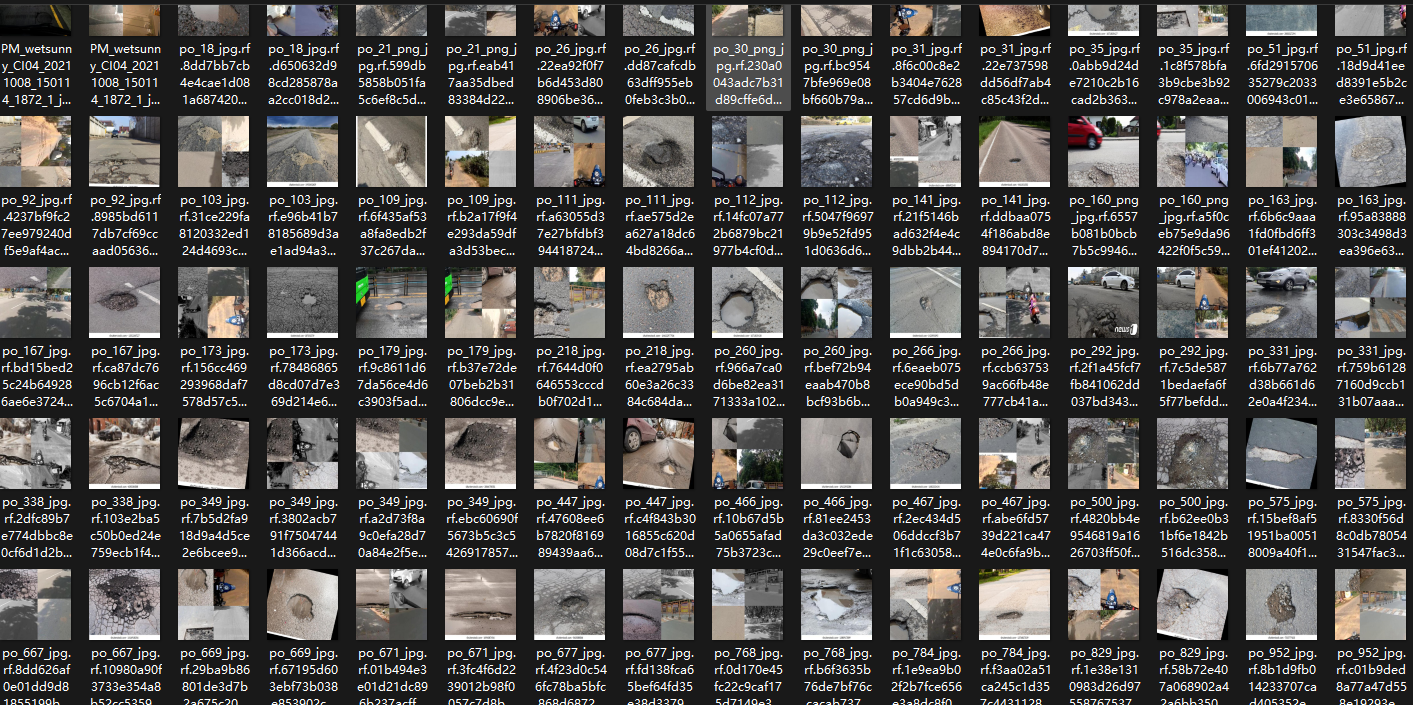
📂 数据目录结构
dataset/
├── train/
│ ├── images/
│ └── labels/
├── valid/
│ ├── images/
│ └── labels/
├── test/
│ ├── images/
│ └── labels/
train/images:训练集图像valid/images:验证集图像test/images:测试集图像labels:对应YOLO格式标注文件
(已完成标准划分,可直接用于训练)
随着智慧城市建设和智能交通系统的不断推进,城市道路的安全与管理问题日益受到重视。道路设施的完好与安全隐患的及时发现,直接关系到交通顺畅、行车安全以及市民的生活质量。在实际道路环境中,井盖缺失或开启、路面坑洞、减速带未标识等情况仍时有发生,这些问题不仅影响道路通行效率,还可能导致交通事故,造成严重的社会和经济损失。传统的人工巡检方式存在效率低、成本高、覆盖面有限等不足,迫切需要结合人工智能技术,通过计算机视觉手段实现对道路设施与安全隐患的自动识别与检测。针对这一需求,本数据集围绕城市道路设施及安全隐患目标检测任务构建,收集并整理了约13,000张高质量图像,覆盖井盖、开启井盖、坑洞、减速带及无标识减速带五类关键目标,同时提供标准化的边界框标注和训练、验证、测试集划分,可直接用于主流目标检测模型的训练与评估。该数据集不仅具备科研价值,可支持目标检测算法研究、模型优化及复杂环境下的鲁棒性分析,也具有工程实用性,为智慧城市道路巡检系统、自动驾驶环境感知以及智能交通管理提供了可靠的数据支撑与实验基础。通过这一数据集,研究者和开发者能够更高效地探索道路安全隐患检测技术,加速人工智能在交通安全领域的应用落地。
三、数据集类别说明
本数据集共包含 5个目标类别:
| 类别名称 | 英文名称 | 说明 |
|---|---|---|
| 井盖 | Manhole | 正常关闭状态井盖 |
| 打开的井盖 | Open Manhole | 存在安全隐患 |
| 坑洞 | Pothole | 路面破损 |
| 减速带 | Speed Bump | 标准减速带 |
| 无标识减速带 | Unmarked Bump | 无明显警示标识 |
类别特点
- 井盖与打开井盖区分明确
- 坑洞覆盖多种形态(小裂缝、大面积破损)
- 减速带包含不同角度与远近距离
- 无标识减速带更具实际工程价值
四、标注说明
- 标注格式:YOLO格式(txt)
- 标注类型:目标边界框(Bounding Box)
- 坐标形式:归一化坐标
- 一图一标注文件
示例格式:
class_id x_center y_center width height
可直接适配:
- YOLOv5 / YOLOv7 / YOLOv8 / YOLOv10 等
- Faster R-CNN
- SSD
- DETR
- 其他目标检测模型
五、数据集优势
1️⃣ 数据量充足
13000张图像,满足中小规模检测任务训练需求。
2️⃣ 类别设计具有工程价值
特别是:
- Open Manhole(开启井盖)
- Unmarked Bump(无标识减速带)
属于高风险类别,具有现实部署意义。
3️⃣ 场景多样性
- 不同光照
- 不同视角
- 不同距离
- 不同路况环境
增强模型泛化能力。
4️⃣ 已完成标准划分
训练 / 验证 / 测试集已分离,可直接实验对比。
六、适用场景
🚗 自动驾驶环境感知
- 路面异常识别
- 安全风险预警
🛣 城市道路巡检系统
- 智能巡检车
- 无人机巡检
- 城市基础设施管理
🚦 智能交通系统(ITS)
- 道路风险统计
- 城市安全评估
🤖 深度学习目标检测教学与实战
- YOLO系列训练实验
- 毕业设计
- 课程项目
- 科研论文
七、训练建议
如果使用YOLO系列模型,推荐:
- 输入尺寸:640 / 800
- Batch size:根据显存调整
- 训练轮数:100~300 epochs
- 数据增强:Mosaic + MixUp
- 适当增加小目标检测权重(针对坑洞类)
如你正在做YOLO单类别或多类别实验,本数据集可直接扩展训练场景。
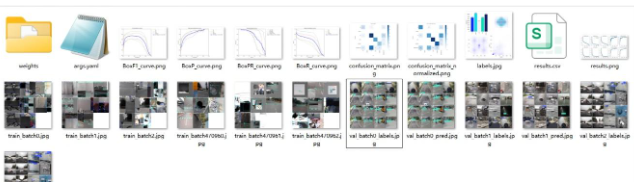
八、实验效果预期
在合理训练参数下,常见YOLO系列模型可获得:
- mAP@0.5 > 0.85(视模型大小与训练策略而定)
- 对明显井盖与坑洞识别准确率较高
- 对远距离无标识减速带检测具挑战性(更具研究价值)
九、结语
城市道路安全隐患检测是智慧城市建设的重要一环。本数据集围绕真实道路场景构建,兼具工程实用性与科研价值。
无论你是:
- 做自动驾驶感知算法
- 做道路巡检系统开发
- 做YOLO系列教学实验
- 做毕业设计 / 论文研究
本数据集都能为你提供完整、规范、可直接训练的高质量数据支持。
如果需要完整数据集、训练配置文件及部署说明,可进一步交流。
综上所述,本城市道路设施及道路安全隐患目标检测数据集围绕实际工程场景构建,兼顾数据规模、类别实用性与标注规范性,具备较强的训练价值与落地意义。数据集覆盖井盖、开启井盖、坑洞、减速带及无标识减速带五类关键目标,不仅包含常规道路设施,还特别强调高风险安全隐患类别,使其在智慧城市管理、道路巡检系统、智能交通系统以及自动驾驶环境感知等方向具备更高的应用价值。约13,000张图像经过清洗、筛选与标准化标注,并完成训练集、验证集、测试集的合理划分,能够直接适配YOLO系列、Faster R-CNN、SSD等主流目标检测框架,显著降低实验准备成本,提高建模效率。从研究角度看,该数据集能够支持小目标检测优化、多类别不均衡问题研究、复杂光照环境鲁棒性分析等技术探索;从工程角度看,可用于道路风险识别、隐患预警统计及智能巡检系统部署测试。整体而言,该数据集不仅适合教学实验与毕业设计使用,也能够作为实际项目原型开发与算法验证的数据基础,为提升城市道路安全管理智能化水平提供可靠的数据支撑与实验环境。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 5
5 0
0- 0



 已为社区贡献142条内容
已为社区贡献142条内容

所有评论(0)