2.18 小结 伯德图
实际系统常由多个子模块级联,总传递函数为各模块传递函数之积,其波特图表现为。(Gain Crossover Frequency)处以。:仅含极点的反馈网络 → 系统穿越 0 dB 时斜率为。的补偿网络 → 在穿越频率附近将斜率从 -2 提升至。(corner frequency),斜率发生改变。(Phase)组成。这种形式便于在分母中直接体现设计参数 ω0。:当二阶系统(如 LC 滤波器)的。每个
目录
- 1. 一阶与二阶无源滤波器的传递函数表达形式
- 2. 极点(Pole)与零点(Zero)的基本概念
- 3. 极点与零点在波特图(Bode Plot)中的作用
- 4. 多模块系统传递函数的叠加分析
- 5. 补偿网络设计思路与系统稳定性
1. 一阶与二阶无源滤波器的传递函数表达形式
一阶低通滤波器(First-order Low-pass Filter)的传递函数,其有多种等效表达方式:
-
常见形式:
-
为便于分析,常改写为:
其中
 ,即截止角频率。
,即截止角频率。 -
有时也写作:
这种形式便于在分母中直接体现设计参数 ω0。
二阶低通滤波器(如 LC 滤波器),其标准传递函数为:
可重写为:
其中:
 :谐振角频率(resonant frequency)
:谐振角频率(resonant frequency) :品质因数(Quality Factor)
:品质因数(Quality Factor)
Q 值的影响:
- Q 过大:在谐振频率处产生尖峰(peaking),可能导致相位突变,影响系统稳定性。
- Q 过小:增益不足,负载调整率(load regulation)性能变差。
- 需在设计中权衡,选择适中的 Q 值。
高通滤波器同理:
- 一阶高通:
- 二阶高通:
关键区别:
- 低通滤波器仅含极点(Poles)
- 高通滤波器包含零点(Zeros)和极点
2. 极点(Pole)与零点(Zero)的基本概念
在开关电源等控制系统中,传递函数通常表示为:

- 分子中的 zi为零点(Zero)
- 分母中的 pi为极点(Pole)
重要性质:
- 实际物理系统中,极点和零点通常为负实数或左半平面(LHP, Left Half Plane)的复数。
- LHP 的极点/零点有助于系统稳定;右半平面(RHP)的零点/极点会带来稳定性挑战。
- 虽然 s 是复变量,但对应的频率始终为正(ω>0ω>0),无“负频率”概念。
3. 极点与零点在波特图(Bode Plot)中的作用
波特图由幅频特性(Magnitude)和相频特性(Phase)组成。极点与零点对曲线的影响如下:
幅频特性(Magnitude Plot)
- 单极点(Single Pole):斜率 -20 dB/decade(即 -1)
- 双重极点(Double Pole):斜率 -40 dB/decade(即 -2)
- 单零点(Single Zero):斜率 +20 dB/decade(即 +1)
- 双重零点(Double Zero):斜率 +40 dB/decade(即 +2)
每个极点/零点在对应频率处引起拐点(corner frequency),斜率发生改变。
相频特性(Phase Plot)
- 单极点:相位滞后最多 -90°,变化范围约在 0.1ωp0.1ωp 到 10ωp10ωp(即 20 倍频程内)
- 双重极点:相位滞后最多 -180°
- 单零点:相位超前最多 +90°
- 双重零点:相位超前最多 +180°
特别注意:当二阶系统(如 LC 滤波器)的 Q 值较高时,在谐振频率处:
- 幅频曲线出现尖峰(peaking)
- 相频曲线可能出现急剧相位跌落(接近 -180°),构成不稳定因素
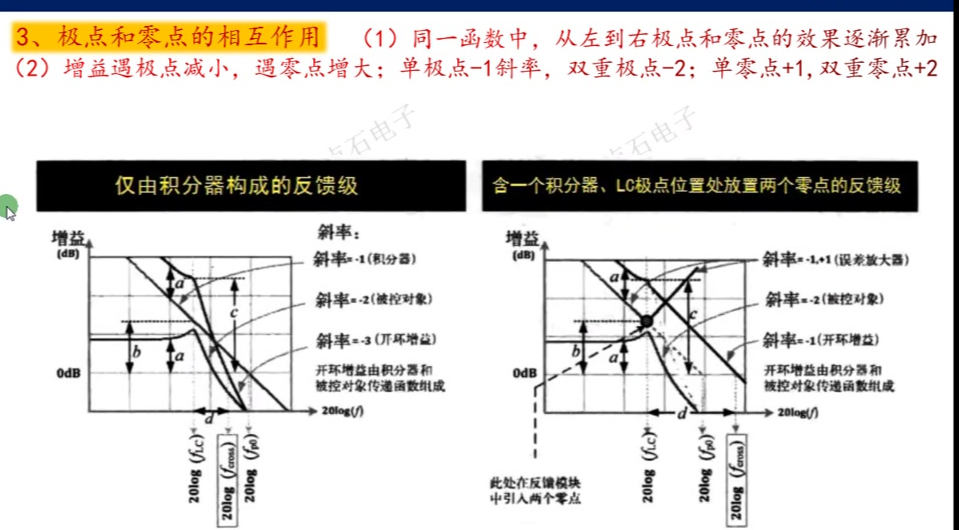
4. 多模块系统传递函数的叠加分析
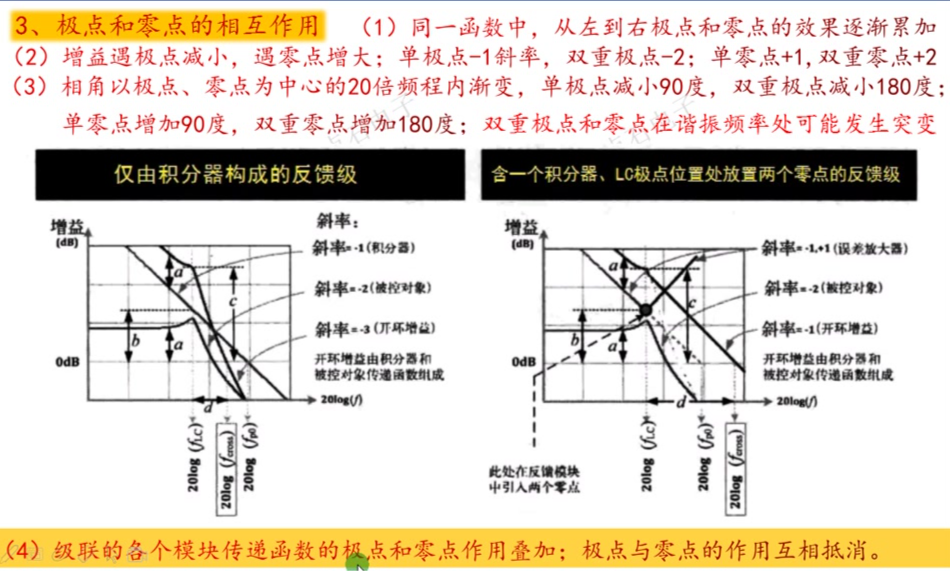
实际系统常由多个子模块级联,总传递函数为各模块传递函数之积,其波特图表现为幅值相加、相位相加。
- 在幅频图中,各模块的斜率在对应频率处叠加。
- 例如:
- 模块 A:低频斜率为 0,高频因单极点变为 -1
- 模块 B:全程斜率为 -1
- 总系统:低频斜率为 -1,高频斜率为 -2
5. 补偿网络设计思路与系统稳定性
补偿设计:
-
方案一:仅含极点的反馈网络 → 系统穿越 0 dB 时斜率为 -2(即 -40 dB/dec)
- 相位裕度小,稳定性较差
-
方案二:引入一个零点的补偿网络 → 在穿越频率附近将斜率从 -2 提升至 -1
- 系统以 -20 dB/dec 斜率穿越 0 dB 线
- 获得足够的相位裕度,稳定性更好
设计目标:确保开环增益在穿越频率(Gain Crossover Frequency)处以 -20 dB/dec 斜率下降,这是经典稳定判据。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 13
13 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)