家务机器人有哪些功能?
现在的家务机器人,已经从过去只会“乱撞”的扫地机,进化成了能听懂人话、能干细活的“全能管家”。现在的家务机器人(特别是2026年及以后的先进机型)已经不再是简单的“吸尘器”或“拖把”,而是集成了多种前沿技术的**“具身智能体”**。这是机器人的“基本功”,目前的技术已经非常成熟,不仅能扫拖,还能处理更复杂的清洁任务。机器人不再局限于固定的某个任务,而是像一个真正的助手一样“跑腿”和“收拾”。现在的
家务机器人有哪些功能?
现在的家务机器人,已经从过去只会“乱撞”的扫地机,进化成了能听懂人话、能干细活的“全能管家”。根据最新的市场发展(特别是2026年CES展会后的趋势),我为你梳理了目前家务机器人主要具备的几大核心功能:
1. 深度清洁与环境维护
这是机器人的“基本功”,目前的技术已经非常成熟,不仅能扫拖,还能处理更复杂的清洁任务。
- 全自动扫拖:不仅能吸尘、拖地,还能自动清洗拖布、自动集尘(有的甚至能做到几个月倒一次垃圾),并自动给拖布热风烘干,防止发霉发臭。
- 死角清洁:通过机械臂或可伸缩的“手”来清洁墙角、家具缝隙等传统机器人够不到的地方。
- 特定场景清洁:比如擦窗机器人,可以自动规划路径清洁玻璃;还有专门针对洗衣机槽或空调滤网的清洁功能。

2. 衣物与厨房全流程管理
这是近年来的突破重点,机器人开始介入过去被认为“机器做不来”的精细家务。
- 洗衣与折叠:机器人可以将脏衣服从篮子里拿出来放进洗衣机,洗完后甚至能将衣物取出并进行自动折叠。例如,LG展示的CLOiD机器人就能完成叠衣服的任务。
- 厨房帮手:
- 洗碗与收纳:机器人可以打开洗碗机,将餐具分类放入,甚至能处理洗完后的收纳。
- 备餐与烹饪:在大模型的驱动下,机器人能执行“准备晚餐”这类复杂指令,将其拆解为取食材、洗菜、配菜甚至简单翻炒的动作。例如,1X Technologies的NEO机器人就能协助完成厨房里的搬运和准备工作。

3. 物品搬运与整理
机器人不再局限于固定的某个任务,而是像一个真正的助手一样“跑腿”和“收拾”。
- 端茶递水:可以将水杯、餐盘从厨房端到客厅,或者给在沙发上的家人递送物品。
- 整理收纳:这是目前人形机器人的展示重点。它们能识别散落在茶几上的杂物、衣物,然后将其分类整理归位(如把衣服叠好放柜子里,把杯子送回厨房)。
- 取放物品:比如从冰箱里拿一瓶水、从架子上取下快递,或者帮忙扔垃圾。

4. 智慧交互与家庭中枢
现在的机器人不仅是“手”和“脚”,还充当了家庭的“大脑”和“嘴”。
- 自然语言交互:得益于大模型(如OpenAI的技术支持),你不需要说指令代码,而是可以直接说“我渴了”或者“把客厅收拾一下”,机器人能理解意图并执行。
- 家庭安防:机器人会在家里自主巡逻,监测是否有烟雾、漏水,或者检测到老人跌倒时立即报警。
- 日程管理:它可以提醒你吃药、关灯,甚至帮你控制全屋的智能家电(如空调、窗帘)。
📊 功能进化对比表
为了让你更直观地了解不同级别机器人的区别,我做了一个简单的对比:
| 机器人类型 | 核心功能 | 典型应用场景 |
|---|---|---|
| 基础清洁类 | 扫地、拖地、集尘、擦窗 | 大户型地面清洁、高层玻璃擦拭 |
| 物品操作类 | 拿取饮料、递送物品、浇花 | 给在沙发上的家人递水、照顾绿植 |
| 复杂任务类 | 叠衣服、洗碗、简单烹饪 | 卧室整理、厨房善后 |
| 管家交互类 | 安防巡逻、语音控制家电、陪伴聊天 | 独居老人看护、家庭娱乐中心 |
💡 补充说明
虽然像Figure 03、1X NEO这样的先进人形机器人已经展示了叠衣服、做菜等强大功能,但目前它们的价格还比较高(约14万人民币或租赁费用),主要面向高收入家庭或早期尝鲜用户。不过,随着技术的普及,这些功能正在逐步下放到更亲民的家用机器人产品中。
目前家务机器人主要采用哪些核心技术?
现在的家务机器人(特别是2026年及以后的先进机型)已经不再是简单的“吸尘器”或“拖把”,而是集成了多种前沿技术的**“具身智能体”**。
结合最新的行业动态(如CES 2026发布的产品和技术演进),我为你梳理了目前家务机器人主要采用的四大核心支柱技术:
1. 感知技术:机器人的“眼耳口鼻”
为了让机器人适应杂乱的家庭环境,它需要像人一样拥有敏锐的感官,这被称为多模态感知融合技术。
- 视觉系统(眼):
- 3D视觉与RGB-D相机:不再是普通的摄像头,而是能感知深度的“眼睛”,能分清物体的远近和高低,避免撞到电线或踢脚线。
- AIVI/语义分割:通过AI算法,机器人不仅能“看到”障碍物,还能“认出”它。比如识别出那是“拖鞋”、“宠物粪便”还是“倒地的水杯”,从而决定是绕开还是清理。
- 听觉与语音(耳):
- 麦克风阵列:在嘈杂的家庭环境中精准捕捉人声,即使在机器运转时也能听清指令。
- 触觉与力觉(手/皮肤):
- 六维力传感器/柔性触觉:这是高端机器人(如人形机器人)的关键。当它拿杯子或叠衣服时,能感知抓握的力度,既不会抓不稳,也不会捏碎物品。
- 环境传感器(鼻/皮肤):
- 部分高端机型开始集成气味传感器(检测燃气泄漏)或温湿度传感器。
2. 决策技术:机器人的“大脑”
这是目前技术进步最快的领域,核心是让机器人从“听指令”变成“懂意图”。
- 大语言模型与VLA模型:
- VLA:即视觉-语言-动作模型。这是家务机器人的“大脑皮层”。它能让机器人理解复杂的自然语言指令,比如你说“我渴了”,它能推理出需要去厨房拿水;或者说“把客厅收拾一下”,它能自动规划出“捡玩具 -> 擦桌子 -> 拖地”的流程。
- 意图理解:通过大模型(如OpenAI、DeepSeek等技术的接入),机器人能处理模糊指令,不再需要死板的代码式命令。
- 因果推理与预测:
- 机器人开始具备初步的“预判”能力。比如看到窗户没关且天气预报要下雨,它会主动去关窗;或者预测到某个动作(如快速抽走桌布)可能会打翻杯子,从而选择更稳妥的动作。
3. 执行与运动控制:机器人的“手脚”
这部分技术决定了机器人是“花拳绣腿”还是“干活一把好手”。
- 灵巧操作(手):
- 自适应柔性夹爪:为了处理像衣服、纸巾这类柔软易变形的物体,机器人开始使用气动驱动或肌腱驱动的柔性夹爪,或者“吸盘+夹爪”的组合,以增大接触面,防止物品滑落。
- 仿生机械臂:采用7自由度(DoF)设计的机械臂,模仿人类手臂的关节结构,能在狭窄空间(如洗衣机内部、橱柜)灵活作业。
- 全向移动底盘(脚):
- SLAM导航:即时定位与地图构建技术,让机器人知道自己在哪,地图是啥样的。
- 足式/轮式混合:除了传统的轮子,一些机器人开始使用仿生腿(如波士顿动力、1X Technologies的技术),这能让机器人上下楼梯、跨越门槛,去到传统扫地机去不了的地方。
4. 安全与能源技术:机器人的“护盾与心脏”
- 人机协作安全:
- 全关节力控:机器人的关节内置了扭矩传感器,一旦碰到人(特别是老人和小孩),能立即感知到碰撞并停止动作,避免造成伤害。
- SafeVLA框架:通过算法让机器人学习物理世界的安全规则,将危险事故率大幅降低(有数据显示可降83%)。
- 能源管理:
- 边缘计算与低功耗芯片:为了保证实时响应(如避障),机器人本地会搭载专用的AI芯片(NPU),而不是完全依赖云端,这样反应更快,也更省电。
- 自动回充与换电:当电量低于20%时,机器人能自主寻找充电桩补能,实现“无人值守”的长期工作。
📊 技术演进对比表
为了让你更直观地了解现在的机器人和过去有什么不同,我做了一个对比:
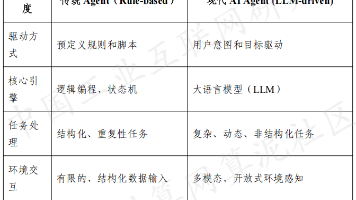
| 技术维度 | 传统扫地机器人 (上一代) | 现代家务机器人 (2026+) |
|---|---|---|
| 核心大脑 | 嵌入式单片机,执行固定逻辑 | 大模型 (LLM/VLA),能理解意图、拆解复杂任务 |
| 视觉能力 | 激光雷达 (只测距) 或 普通摄像头 | RGB-D深度相机 + 语义分割,能识别物体类别和属性 |
| 交互方式 | App点按 或 简单语音唤醒 | 自然语言对话,支持模糊指令和多轮交互 |
| 操作能力 | 只能吸尘、拖地 (平面清洁) | 具备机械臂,能叠衣、洗碗、取放物品 (立体操作) |
| 移动方式 | 纯轮式,无法越障 | 轮式+腿式 或 高通过性底盘,能爬楼梯、过门槛 |
总结来说,现在的家务机器人核心技术是**“大模型驱动决策 + 多模态感知环境 + 灵巧操作执行”**的深度融合。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 9
9 0
0- 0



 已为社区贡献84条内容
已为社区贡献84条内容

所有评论(0)