这个会跳舞的小车有点东西——用MATLAB玩转倒立摆
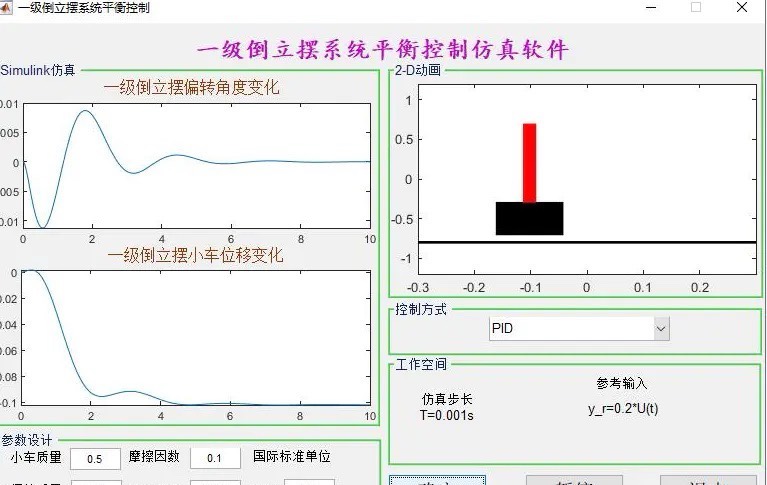
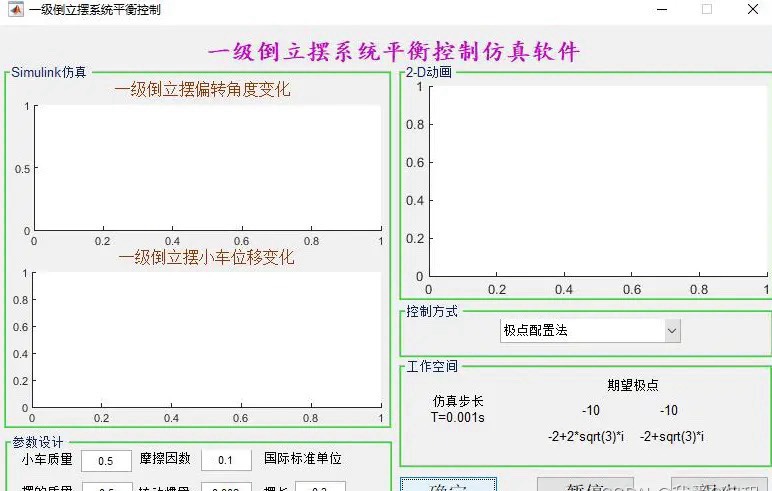
直接上硬菜,先看现场表演:在MATLAB的GUI界面上,小车载着细杆左右漂移,突然给个干扰力,杆子晃两下居然又站稳了!这里的门道在于Q矩阵的第三项特别大,相当于告诉控制器:"杆子的角度最重要,给老子盯紧了!使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。同时,也可以获取小车轮子转动的圈数N(可以精确到小数)和杆相对于垂直位置的倾角α.同时,也可以获取小车轮子转
基于matlab的一级倒立摆系统控制仿真,带GUI操作界面 1.软件版本 matlab2022a 2.运行方法 使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。 运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。 具体操作观看提供的程序操作视频跟着操作。 3.内容简介 一个可以活动的小车上立着一根不稳定随时会倒下的杆。 小车的轮子由电机控制,可以控制小车电机的转动力矩M。 同时,也可以获取小车轮子转动的圈数N(可以精确到小数)和杆相对于垂直位置的倾角α. 不考虑车轮打滑, 小车所受力大小等于电机力矩乘车轮半径, 小车位置可以从转动圈数计算出, 小车可简化为最经典的一阶倒立摆:
当你在某宝搜平衡车时,可曾想过背后藏着怎样的控制魔法?今天咱们就来拆解这个走钢丝的机器人——一级倒立摆系统。直接上硬菜,先看现场表演:在MATLAB的GUI界面上,小车载着细杆左右漂移,突然给个干扰力,杆子晃两下居然又站稳了!
先扒开系统外壳看内脏。倒立摆的状态方程长这样:
% 系统参数配置
M = 0.5; % 小车质量
m = 0.2; % 摆杆质量
l = 0.3; % 摆杆半长
g = 9.81; % 重力加速度
% 状态空间方程
A = [0 1 0 0;
0 0 (-m*g)/M 0;
0 0 0 1;
0 0 (M+m)*g/(M*l) 0];
B = [0; 1/M; 0; -1/(M*l)];这组方程堪称平衡车界的地基,但直接控制容易翻车。聪明的工程师们祭出LQR控制器,就像给系统装了自动驾驶仪:
Q = diag([10 1 100 10]); % 状态权重
R = 0.01; % 控制量权重
K = lqr(A,B,Q,R); % 计算反馈矩阵这里的门道在于Q矩阵的第三项特别大,相当于告诉控制器:"杆子的角度最重要,给老子盯紧了!"
基于matlab的一级倒立摆系统控制仿真,带GUI操作界面 1.软件版本 matlab2022a 2.运行方法 使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。 运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。 具体操作观看提供的程序操作视频跟着操作。 3.内容简介 一个可以活动的小车上立着一根不稳定随时会倒下的杆。 小车的轮子由电机控制,可以控制小车电机的转动力矩M。 同时,也可以获取小车轮子转动的圈数N(可以精确到小数)和杆相对于垂直位置的倾角α. 不考虑车轮打滑, 小车所受力大小等于电机力矩乘车轮半径, 小车位置可以从转动圈数计算出, 小车可简化为最经典的一阶倒立摆:
接下来是重头戏——GUI交互界面。MATLAB的GUIDE工具生成的.fig文件里藏着一个控制面板:
function start_Callback(hObject, eventdata, handles)
% 启动按钮回调函数
set_param('pendulum_model','SimulationCommand','start');
set(handles.status_text,'String','倒立摆开始起舞');
% 实时数据更新线程
while strcmp(get_param('pendulum_model','SimulationStatus'),'running')
angle = get(logsout,'angle').Values.Data;
position = get(logsout,'position').Values.Data;
refreshdata(handles.plot_axes,'caller');
drawnow;
end
end这个回调函数就像指挥家的手势,一点按钮就触发仿真交响乐。实时曲线用了个骚操作——在while循环里持续抓取仿真数据,drawnow强制刷新画面,效果堪比丝滑的60帧动画。
看看界面上的小心机:
- 参数输入区支持手动调参,把Q矩阵的[10,1,100,10]改成[50,1,200,5],立马能看到杆子从老大爷遛弯变成街舞小哥
- 干扰力滑块实时生效,轻轻一拖就让小车表演"刹车急停接回旋镖"
- 状态曲线采用双Y轴设计,小车位移和摆杆角度同台飙戏
实测效果惊掉下巴:初始角度给到20度(远超线性区),控制器愣是能掰回来。不过别高兴太早,把摆杆质量调到0.5kg试试?系统直接给你表演原地去世,这说明什么?控制算法不是万能的,物理设计也得跟上啊!
文件包里暗藏玄机:
- main.m是总控程序,内含模型加载秘术
- animate_pendulum.m负责三维动画,用hgtransform玩空间变换魔术
- params.mat保存着祖传调参方案,新手建议从这开始折腾
最后奉劝各位:仿真终觉浅,绝知此事要躬行。调参时记得做好心理建设——你永远不知道下一组参数会让杆子跳芭蕾还是跳楼。但正是这种不确定性,才是控制工程的魅力所在,不是吗?

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 5
5 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)