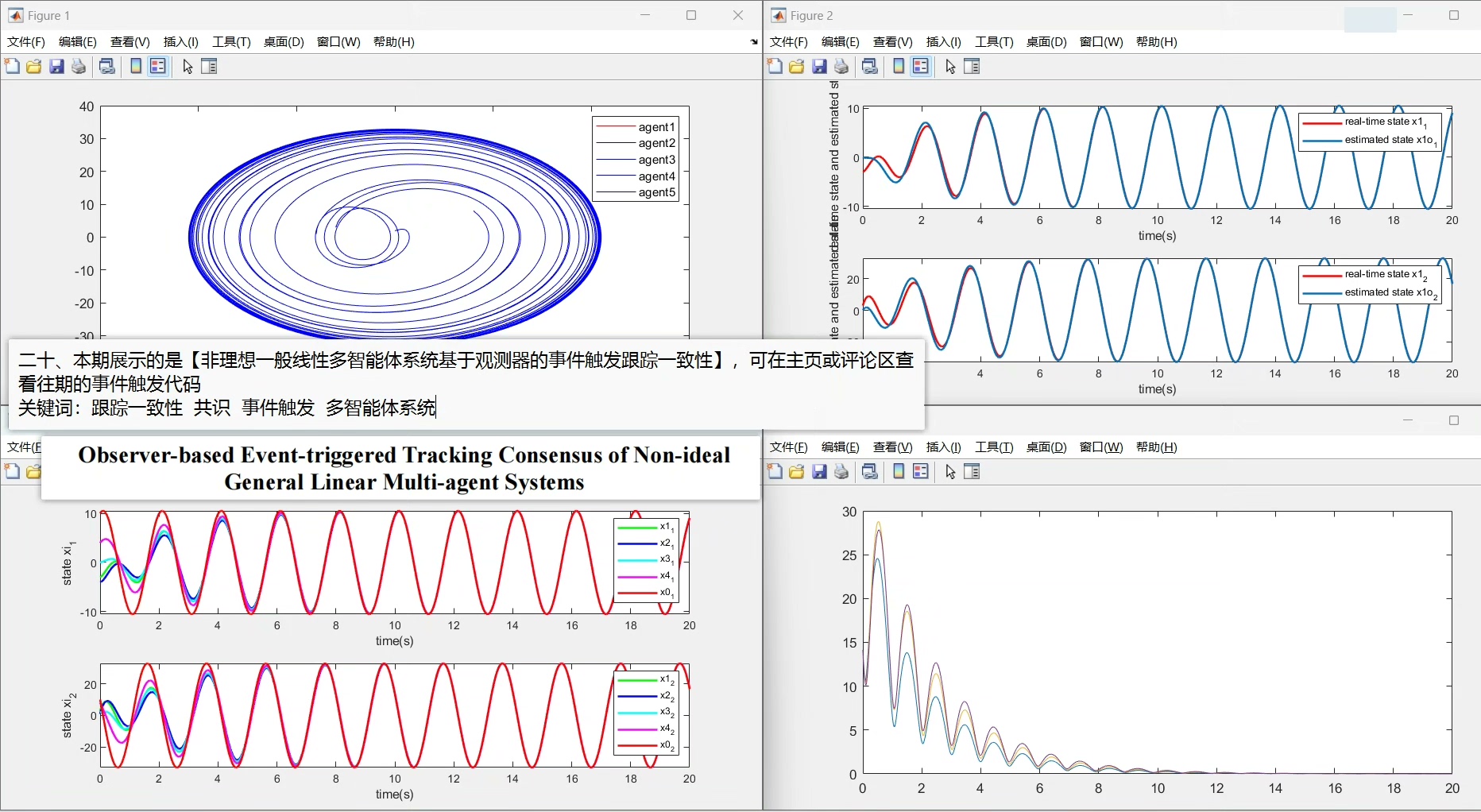
基于观测器的非理想一般线性多智能体系统的事件触发跟踪共识
基于观测器的非理想一般线性多智能体系统的事件触发跟踪共识,通过巧妙地结合观测器设计和事件触发机制,为多智能体系统在复杂实际环境下实现高效的跟踪共识提供了一种可行的解决方案。在未来的研究中,可以进一步探索如何优化观测器和事件触发条件,以适应更多不同类型的非理想情况,提升系统的性能和鲁棒性。
基于观测器的非理想一般线性多智能体系统的事件触发跟踪共识 关键词:跟踪一致性 共识 事件触发 多智能体系统 附参考文献
在多智能体系统(Multi - Agent Systems, MAS)的研究领域中,跟踪共识问题一直是热点话题。随着实际应用场景的不断拓展,考虑非理想情况以及采用事件触发机制来实现跟踪共识显得尤为重要。本文将探讨基于观测器的非理想一般线性多智能体系统的事件触发跟踪共识。
一、多智能体系统基础
多智能体系统由多个相互作用的智能体组成,每个智能体都有自己的动力学模型。一般线性多智能体系统中,第 \( i \) 个智能体的动力学方程可以表示为:
\[
\dot{x}i(t) = Axi(t) + Bu_i(t)
\]
其中,\( xi(t) \in \mathbb{R}^n \) 是状态向量,\( ui(t) \in \mathbb{R}^m \) 是控制输入,\( A \) 和 \( B \) 是适当维数的矩阵。
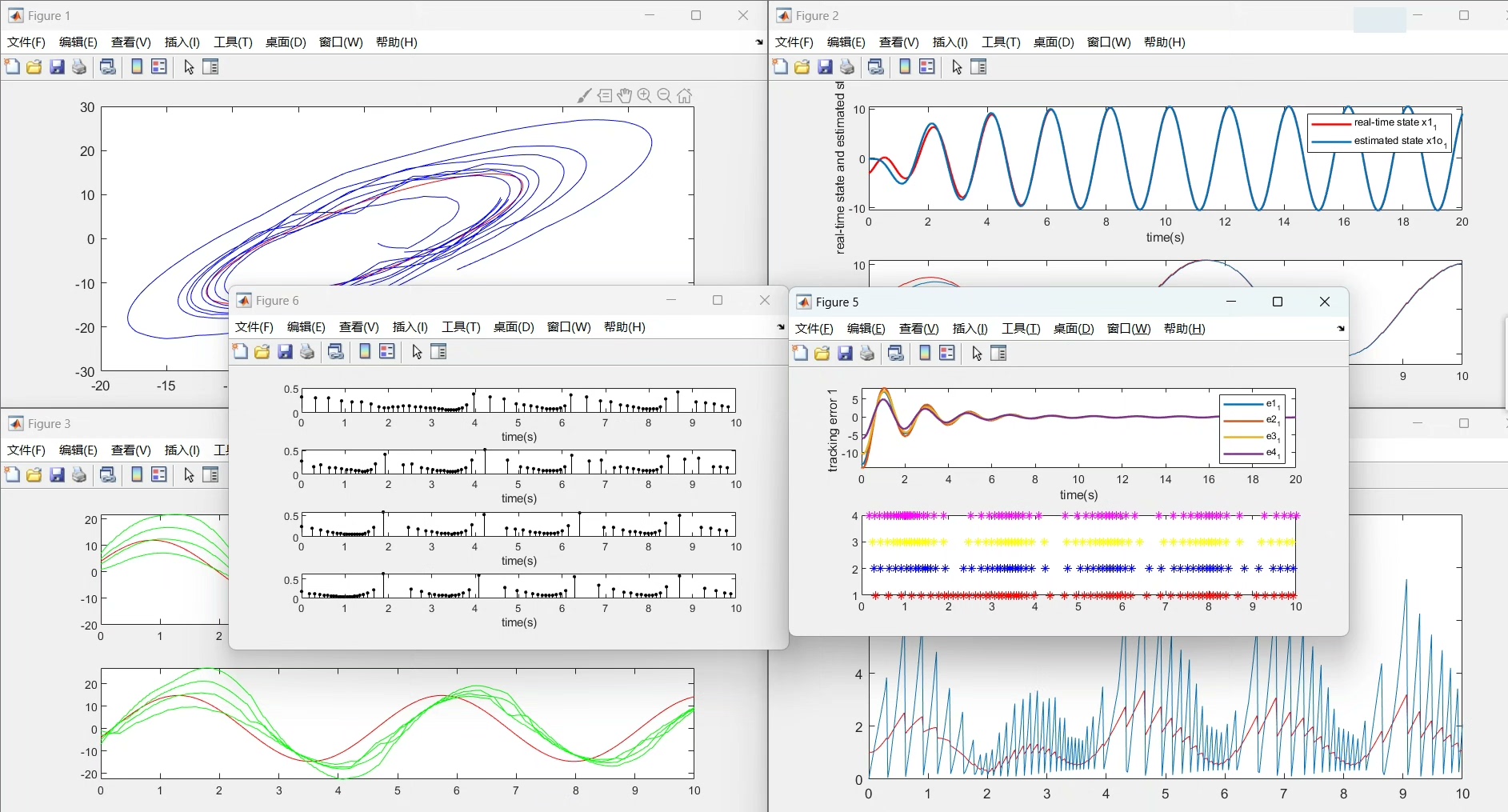
二、事件触发机制
传统的连续时间控制策略在实际应用中可能会带来过高的通信和计算负担。事件触发机制则是一种有效的解决方案,它通过设定特定的触发条件,仅在必要时进行信息更新和控制输入调整。
假设我们定义一个事件触发函数 \( ei(t) \),当 \( ei(t) \) 满足一定条件,比如 \( \|e_i(t)\| > \sigma \)(\( \sigma \) 是一个预先设定的阈值)时,触发事件,进行信息传输和控制更新。
以下是一个简单的事件触发条件判断的伪代码示例:
sigma = 0.1 # 设定阈值
e_i = calculate_e_i() # 计算事件触发函数值
if abs(e_i) > sigma:
# 触发事件,进行信息更新和控制调整
update_information()
adjust_control()这里,calculateei() 函数用于计算事件触发函数 \( ei(t) \) 的值,updateinformation() 和 adjust_control() 分别是进行信息更新和控制调整的函数。这种基于事件触发的机制可以大大减少不必要的通信和计算,提高系统的效率。
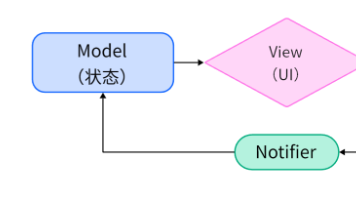
三、基于观测器的设计
在非理想情况下,智能体可能无法直接获取其他智能体的完整状态信息。这时,观测器的设计就变得至关重要。我们可以设计一个观测器来估计其他智能体的状态。
以 Luenberger 观测器为例,对于第 \( i \) 个智能体,观测器的动态方程可以写为:
\[
\dot{\hat{x}}i(t) = A\hat{x}i(t) + Bui(t) + Li(yi(t) - \hat{y}i(t))
基于观测器的非理想一般线性多智能体系统的事件触发跟踪共识 关键词:跟踪一致性 共识 事件触发 多智能体系统 附参考文献
\]
其中,\( \hat{x}i(t) \) 是估计状态,\( yi(t) \) 是实际测量输出,\( \hat{y}i(t) \) 是估计输出,\( Li \) 是观测器增益矩阵。
下面是一个简单的 Python 代码实现 Luenberger 观测器的部分核心代码(假设系统是二维的,仅为示例,实际应用需根据具体系统参数调整):
import numpy as np
# 系统矩阵
A = np.array([[1, 0], [0, 1]])
B = np.array([[1], [0]])
C = np.array([[1, 0]]) # 输出矩阵
# 观测器增益矩阵
L = np.array([[0.5], [0.5]])
# 初始状态和估计状态
x = np.array([[1], [2]])
hat_x = np.array([[0], [0]])
dt = 0.01 # 时间步长
# 模拟观测器动态
for _ in range(100):
u = np.array([[0]]) # 假设控制输入
y = C.dot(x)
hat_y = C.dot(hat_x)
hat_x_dot = A.dot(hat_x) + B.dot(u) + L.dot(y - hat_y)
hat_x = hat_x + hat_x_dot * dt在这段代码中,我们首先定义了系统矩阵 \( A \)、输入矩阵 \( B \) 和输出矩阵 \( C \),以及观测器增益矩阵 \( L \)。然后设定了初始状态 \( x \) 和估计状态 \( \hat{x} \)。通过模拟观测器的动态方程,不断更新估计状态 \( \hat{x} \)。
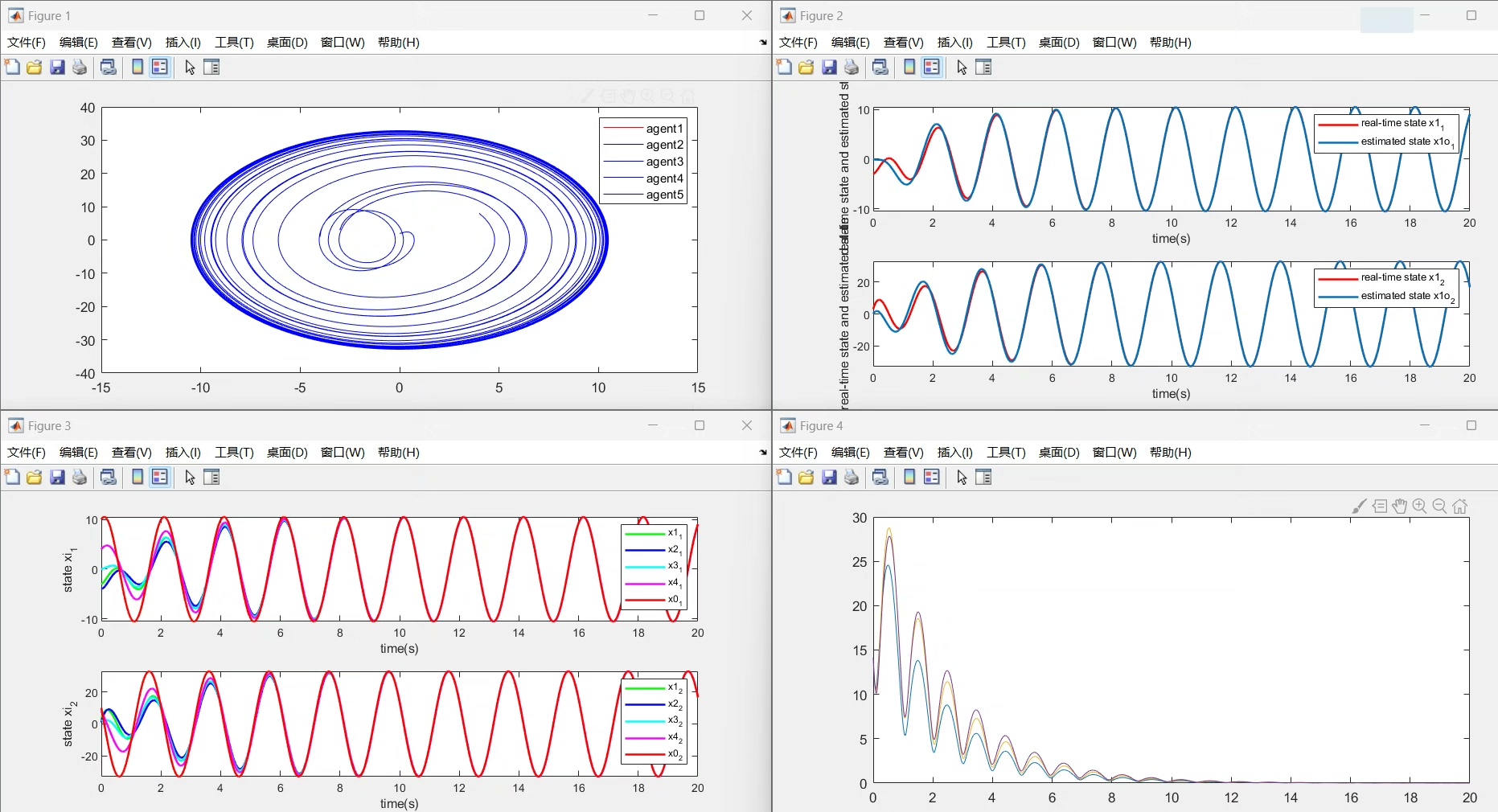
四、跟踪共识的实现
结合事件触发机制和观测器设计,我们的目标是让多智能体系统实现跟踪共识,即所有智能体的状态能够跟踪一个给定的参考信号 \( r(t) \)。
为了实现这一目标,我们可以设计控制律 \( u_i(t) \),例如:
\[
ui(t) = -K\sum{j \in \mathcal{N}i}( \hat{x}i(t) - \hat{x}j(t)) - Kr(\hat{x}_i(t) - r(t))
\]
其中,\( K \) 和 \( Kr \) 是反馈增益矩阵,\( \mathcal{N}i \) 是第 \( i \) 个智能体的邻居集合。
五、总结
基于观测器的非理想一般线性多智能体系统的事件触发跟踪共识,通过巧妙地结合观测器设计和事件触发机制,为多智能体系统在复杂实际环境下实现高效的跟踪共识提供了一种可行的解决方案。在未来的研究中,可以进一步探索如何优化观测器和事件触发条件,以适应更多不同类型的非理想情况,提升系统的性能和鲁棒性。
参考文献
[此处可根据实际参考文献列表依次列出,例如:
[1] Author1, Title1, Journal1, Volume1, Issue1, Pages1 - Pages2, Year1.
[2] Author2, Title2, Book2, Publisher2, Year2.]
希望本文对大家理解这一领域的知识有所帮助,欢迎大家一起讨论交流。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 16
16 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)