无人机集群路径规划:用群智能算法玩转飞行路径
基于群智能体优化算法的无人机集群路径规划算法,MATLAB仿真,可生成包括每架无人机路径、高度、威胁、转角、迭代次数等,有代码讲解,运用蜣螂算法、豪猪算法、蚁群算法来对无人机集群路径规划,分布式规划
无人机集群,这个听起来既酷炫又高大上的技术,近年来在物流、农业、军事等领域都有广泛应用。但说到无人机集群的路径规划,那可是一个让人头大的问题。毕竟,要让一群无人机在空中飞行,不仅要避开障碍物,还要协调彼此的路径,确保飞行效率和安全性。今天,我们就来聊聊如何用群智能优化算法来解决这个问题,还会用MATLAB仿真一下,看看效果如何。
群智能算法:无人机集群的“大脑”
群智能算法(Swarm Intelligence)是一类模拟自然界群体行为的算法,比如蚂蚁觅食、蜜蜂采蜜、鸟群飞行等等。这些算法的特点是通过简单的个体行为,通过群体协作实现复杂的目标。在无人机集群路径规划中,我们可以用这些算法来模拟无人机的飞行行为,从而找到最优的飞行路径。
蜣螂算法(蜣螂优化算法,SCA)
蜣螂算法是一种模拟蜣螂滚粪球行为的优化算法。蜣螂在寻找粪球的过程中,会不断调整方向和力度,最终将粪球滚到理想的位置。在无人机路径规划中,我们可以用蜣螂算法来模拟无人机在复杂环境中寻找最优路径的过程。
蜣螂算法的核心思想
- 初始化:随机生成一群“蜣螂”,每个蜣螂代表一个可能的无人机路径。
- 迭代:每个蜣螂根据当前路径的适应度(比如路径长度、威胁程度等)调整自己的飞行方向和速度。
- 更新:保留适应度最好的路径,作为下一次迭代的参考。
MATLAB代码示例
% 初始化蜣螂种群
population = rand(nDrones, nDimensions);
% 迭代次数
maxIterations = 100;
% 迭代过程
for iter = 1:maxIterations
% 计算每个路径的适应度
fitness = calculateFitness(population);
% 找到当前最优路径
[~, bestIndex] = min(fitness);
bestPath = population(bestIndex, :);
% 更新种群
for i = 1:nDrones
% 计算方向和速度
direction = randn(nDimensions);
speed = 0.5 * rand();
% 更新路径
population(i, :) = bestPath + speed * direction;
% 保持路径在可行范围内
population(i, :) = max(population(i, :), minBoundary);
population(i, :) = min(population(i, :), maxBoundary);
end
end豪猪算法(豪猪优化算法,HPO)
豪猪算法是一种模拟豪猪刺猬行为的优化算法。豪猪在遇到危险时会竖起刺猬,形成一个保护屏障。在无人机路径规划中,豪猪算法可以用来模拟无人机在威胁环境中寻找安全路径的过程。
豪猪算法的核心思想
- 初始化:随机生成一群“豪猪”,每个豪猪代表一个可能的无人机路径。
- 迭代:每个豪猪根据当前路径的安全性调整自己的飞行方向和速度。
- 更新:保留安全性最好的路径,作为下一次迭代的参考。
MATLAB代码示例
% 初始化豪猪种群
population = rand(nDrones, nDimensions);
% 迭代次数
maxIterations = 100;
% 迭代过程
for iter = 1:maxIterations
% 计算每个路径的安全性
safety = calculateSafety(population);
% 找到当前最优路径
[~, bestIndex] = max(safety);
bestPath = population(bestIndex, :);
% 更新种群
for i = 1:nDrones
% 计算方向和速度
direction = randn(nDimensions);
speed = 0.5 * rand();
% 更新路径
population(i, :) = bestPath + speed * direction;
% 保持路径在可行范围内
population(i, :) = max(population(i, :), minBoundary);
population(i, :) = min(population(i, :), maxBoundary);
end
end蚁群算法(Ant Colony Optimization,ACO)
蚁群算法是一种模拟蚂蚁觅食行为的优化算法。蚂蚁通过释放信息素来引导其他蚂蚁找到食物。在无人机路径规划中,蚁群算法可以用来模拟无人机在复杂环境中寻找最优路径的过程。
蚁群算法的核心思想
- 初始化:随机生成一群“蚂蚁”,每个蚂蚁代表一个可能的无人机路径。
- 迭代:每个蚂蚁根据当前路径的信息素浓度和启发式信息(比如路径长度、威胁程度等)选择下一步的位置。
- 更新:根据每个路径的适应度更新信息素浓度,保留最优路径。
MATLAB代码示例
% 初始化蚂蚁种群
population = rand(nDrones, nDimensions);
% 初始化信息素矩阵
pheromone = ones(nDimensions);
% 迭代次数
maxIterations = 100;
% 迭代过程
for iter = 1:maxIterations
% 计算每个路径的适应度
fitness = calculateFitness(population);
% 更新信息素矩阵
pheromone = pheromone * evaporationRate;
[~, bestIndex] = min(fitness);
bestPath = population(bestIndex, :);
pheromone(bestPath) = pheromone(bestPath) + reinforcement;
% 更新种群
for i = 1:nDrones
% 计算下一步的位置
nextPosition = calculateNextPosition(population(i, :), pheromone);
% 更新路径
population(i, :) = nextPosition;
end
end分布式规划:让无人机自己做决定
在无人机集群路径规划中,分布式规划是一种重要的方法。分布式规划的核心思想是让每架无人机根据自己的传感器数据和局部信息做出飞行决策,而不是依赖于一个中央控制器。这样可以提高系统的鲁棒性和实时性。
分布式规划的优势
- 鲁棒性:即使部分无人机出现故障,整个系统仍然可以正常运行。
- 实时性:无人机可以根据实时环境变化调整飞行路径。
- 可扩展性:分布式规划可以轻松扩展到大规模无人机集群。
MATLAB仿真:看看效果如何
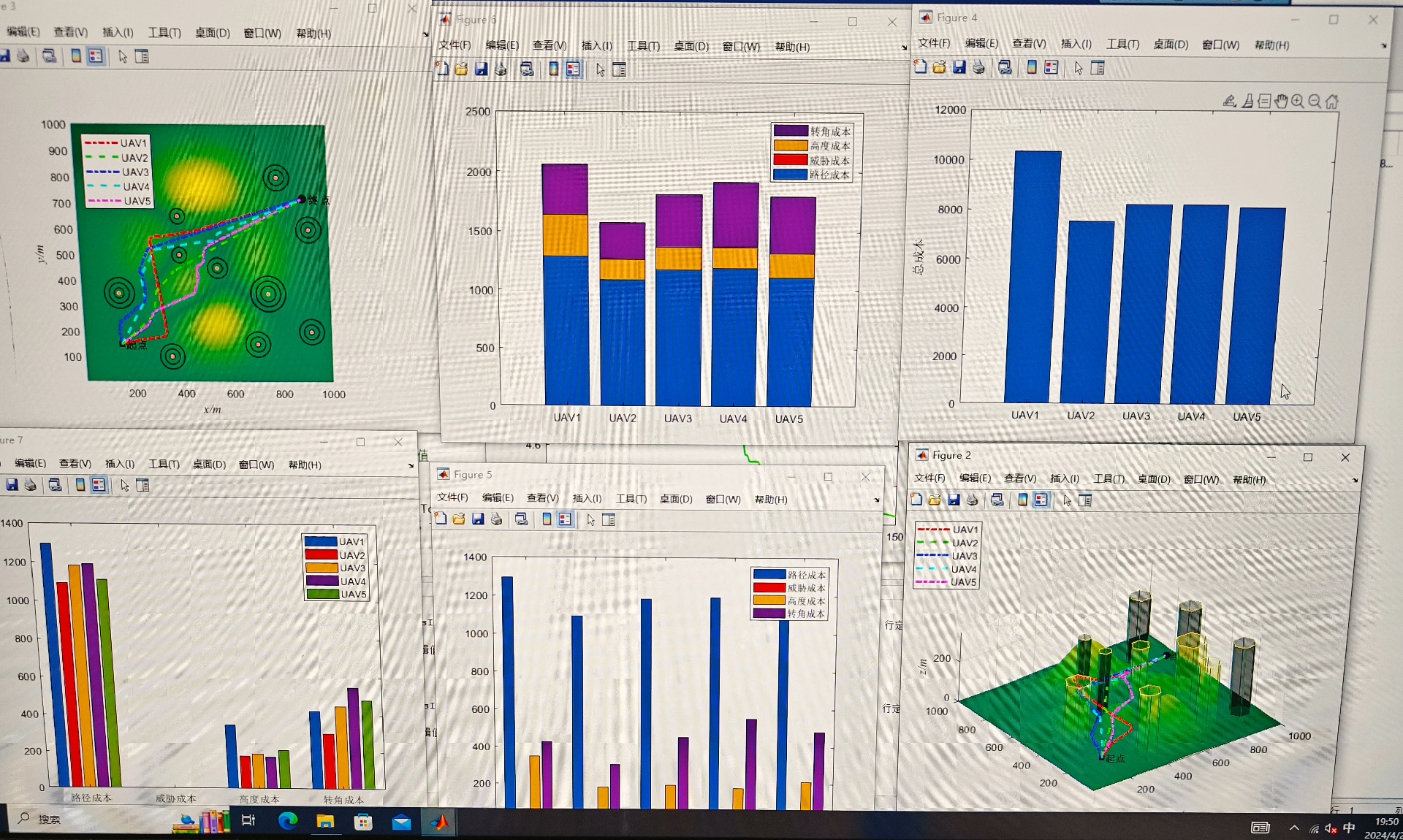
通过MATLAB仿真,我们可以直观地看到无人机集群的飞行路径、高度、威胁、转角、迭代次数等信息。以下是一个简单的MATLAB仿真示例:
仿真代码示例
% 初始化无人机集群
nDrones = 10;
nDimensions = 2;
population = rand(nDrones, nDimensions);
% 迭代次数
maxIterations = 100;
% 仿真过程
for iter = 1:maxIterations
% 计算每个无人机的适应度
fitness = calculateFitness(population);
% 找到当前最优路径
[~, bestIndex] = min(fitness);
bestPath = population(bestIndex, :);
% 更新种群
for i = 1:nDrones
% 计算方向和速度
direction = randn(nDimensions);
speed = 0.5 * rand();
% 更新路径
population(i, :) = bestPath + speed * direction;
% 保持路径在可行范围内
population(i, :) = max(population(i, :), minBoundary);
population(i, :) = min(population(i, :), maxBoundary);
end
% 可视化无人机路径
plot(population(:, 1), population(:, 2), 'b.');
hold on;
plot(bestPath(1), bestPath(2), 'r*', 'MarkerSize', 10);
title(sprintf('Iteration %d', iter));
drawnow;
hold off;
end总结
通过群智能算法和分布式规划,我们可以实现无人机集群的高效路径规划。无论是蜣螂算法、豪猪算法,还是蚁群算法,都有其独特的特点和适用场景。在实际应用中,我们可以根据具体需求选择合适的算法,或者将多种算法结合使用,以达到更好的效果。
基于群智能体优化算法的无人机集群路径规划算法,MATLAB仿真,可生成包括每架无人机路径、高度、威胁、转角、迭代次数等,有代码讲解,运用蜣螂算法、豪猪算法、蚁群算法来对无人机集群路径规划,分布式规划
如果你对无人机集群路径规划感兴趣,不妨自己动手尝试一下,用MATLAB或者其他工具实现一个简单的仿真,看看效果如何。说不定你还能发现一些新的优化方法,为无人机集群技术的发展贡献一份力量!

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 14
14 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)