Simulate an AC Motor Drive MATLAB_help文档DeepSeek翻译
现在定义 AC4 的设定点(SP)输入。对于此示例,感应电机转矩受控,并施加一系列转矩设定点。可以使用 Stair Generator 模块定义一系列设定点。连接到 AC4 模块设定点输入的 Stair Generator 模块生成在指定时间变化的信号。在此示例中,生成以下转矩序列。t (s)转矩设定点 (N.m)000.026000.2500.5-6000.750将 Stair Generato
仿真交流电机驱动
AC1、AC2、AC3 和 AC4 模型基于三相感应电机。该电机在定子侧具有三相绕组,转子为绕线式或鼠笼式。鼠笼式转子由嵌入转子铁芯的导电槽构成,导电条在转子两端通过导电环短路。AC5 模型基于绕线式同步电机,AC6 模型使用永磁同步电机。这些交流电机由逆变器产生的可变交流电压和频率供电。六个交流驱动模型中使用的逆变器类型为电压源型逆变器(VSI),即该逆变器由恒定直流电压供电。该恒定电压由不控二极管整流器和电容器(容性直流母线电压)提供。
动态制动
当直流母线由二极管整流器供电时,驱动装置不具备双向功率流动能力,因此无法进行再生制动。在 AC1、AC2、AC3、AC4 和 AC6 模型中,与斩波器串联的制动电阻确保电机-负载系统的制动。这种制动方案称为动态制动。它并联在直流母线上,以防止电机减速时母线电压升高。通过动态制动,电机-负载系统的动能被转换为制动电阻中耗散的热能。
调制技术
交流驱动模型中使用的 VSI 逆变器基于两种调制类型:滞环调制和空间矢量脉宽调制(PWM)。
滞环调制是一种反馈电流控制方法,其中电机电流在滞环带内跟踪参考电流。下图显示了滞环调制的工作原理。控制器生成所需幅值和频率的正弦参考电流,并与实际的电机线电流进行比较。如果电流超过滞环带的上限,则逆变器桥臂的上开关关断,下开关导通。结果,电流开始衰减。如果电流低于滞环带的下限,则逆变器桥臂的下开关关断,上开关导通。结果,电流回到滞环带内。因此,实际电流被强制在滞环带内跟踪参考电流。
下图显示了滞环电流控制调制方案,由三个滞环比较器组成,每相一个。这种类型的闭环 PWM 用于 AC3 和 AC5 模型。
空间矢量调制技术与滞环调制的不同之处在于,它不是为三相中的每一相使用单独的滞环比较器。相反,参考电压空间矢量 VsV_sVs 作为一个整体产生,以固定频率采样,然后通过相邻的非零逆变器电压空间矢量 V1V_1V1 到 V6V_6V6 以及零电压空间矢量 V0V_0V0、V7V_7V7 的适当时序来构建。VSI 逆变器的简化图如下所示。在此图中,逆变器三个桥臂的导通状态由三个逻辑变量 SA、SB 和 SC 表示。逻辑 1 表示上开关导通,逻辑 0 表示下开关导通。
VSI PWM 逆变器简化图
在此图中,逆变器三个桥臂的导通状态由三个逻辑变量 SA、SB 和 SC 表示。逻辑 1 表示上开关导通,逻辑 0 表示下开关导通。
SA、SB、SC 的开关动作导致逆变器有八种状态。开关状态及相应的相电压(相对于中性点)总结在列出状态、逆变器操作和空间电压矢量的表格中。六个有效矢量彼此相隔 60 度角,描述了一个六边形边界。两个零矢量位于原点。
例如,对于逆变器空间矢量电压图中所示的 VsV_sVs 矢量位置,生成逆变器输出的方法是部分时间使用相邻矢量 V1V_1V1 和 V2V_2V2 以满足平均输出需求。电压 VsV_sVs 可以分解为:
Vb=23Vs⋅sinδV_b = \frac{2}{\sqrt{3}} V_s \cdot \sin \deltaVb=32Vs⋅sinδ
Va=Vs⋅cosδ−12VbV_a = V_s \cdot \cos \delta - \frac{1}{2} V_bVa=Vs⋅cosδ−21Vb
VaV_aVa 和 VbV_bVb 分别是 VsV_sVs 沿 V1V_1V1 和 V2V_2V2 的分量。考虑平均输出必须匹配指令的周期 TcT_cTc,将状态 1 和 2 以及零电压状态的持续时间写为:
ta=32⋅VaVd⋅Tct_a = \frac{3}{2} \cdot \frac{V_a}{V_d} \cdot T_cta=23⋅VdVa⋅Tc
tb=23⋅VbVd⋅Tct_b = \frac{2}{3} \cdot \frac{V_b}{V_d} \cdot T_ctb=32⋅VdVb⋅Tc
tz=Tc−(ta+tb)t_z = T_c - (t_a + t_b)tz=Tc−(ta+tb)
| 状态 | SA | SB | SC | 逆变器操作 | 空间电压矢量 |
|---|---|---|---|---|---|
| 0 | 1 | 1 | 1 | 续流 | V0V_0V0 |
| 1 | 1 | 0 | 0 | 有效 | V1V_1V1 |
| 2 | 1 | 1 | 0 | 有效 | V2V_2V2 |
| 3 | 0 | 1 | 0 | 有效 | V3V_3V3 |
| 4 | 0 | 1 | 1 | 有效 | V4V_4V4 |
| 5 | 0 | 0 | 1 | 有效 | V5V_5V5 |
| 6 | 1 | 0 | 1 | 有效 | V6V_6V6 |
| 7 | 0 | 0 | 0 | 续流 | V7V_7V7 |
开环压频比控制
交流电机定子磁通等于定子电压与频率之比,因为
φ(t)=∫v(t)dt\varphi(t) = \int v(t) dtφ(t)=∫v(t)dt
其中
v(t)=2⋅V⋅sin(ω⋅t)v(t) = \sqrt{2} \cdot V \cdot \sin(\omega \cdot t)v(t)=2⋅V⋅sin(ω⋅t)
因此
φ(t)=2⋅Vω⋅cos(ω⋅t)\varphi(t) = \frac{\sqrt{2} \cdot V}{\omega} \cdot \cos(\omega \cdot t)φ(t)=ω2⋅V⋅cos(ω⋅t)
由于电机由可变交流电源电压和频率供电,如果要避免磁饱和,在恒转矩区域保持 V/Hz 恒定非常重要。典型的 V/Hz 特性如下图所示。请注意,直线有一个小的电压提升,以补偿低频时的电阻压降。开环 V/Hz 控制用于低动态应用,例如泵或风机,其中电机速度随负载的微小变化是可接受的。AC1 模型基于开环 V/Hz 控制器。
带转差补偿的闭环速度控制
在这种类型的控制中,将转差速度指令添加到测量的转子速度以产生所需的逆变器频率。基于 PI 的速度调节器产生转差指令。所需的逆变器频率通过 V/Hz 特性(如上图所示)产生电压指令。AC2 模型基于使用 V/Hz 和转差调节的闭环速度控制。
磁场定向控制
直流电机的结构使得励磁磁通与电枢磁通垂直。由于正交,这两个磁通彼此之间不产生净相互作用。因此,可以通过调节励磁电流来控制直流电机磁通,并且可以通过调节电枢电流独立于磁通来控制转矩。交流电机则不那么简单,因为定子和转子磁场之间存在相互作用,其方向不保持在 90 度,而是随运行条件变化。通过将定子电流相对于转子磁通定向,以获得独立控制的磁通和转矩,可以在交流电机中获得类似直流电机的性能,即保持励磁磁场和电枢磁场之间固定且正交的方向。这种控制方案称为磁场定向控制或矢量控制。矢量控制适用于感应电机和同步电机。我们现在将看到它如何应用于感应电机。
考虑在同步速度 ωe\omega_eωe 下旋转的参考系中的感应电机 d-q 模型,
Vqs=Rsiqs+ddtφqs+ωeφdsV_{qs} = R_s i_{qs} + \frac{d}{dt} \varphi_{qs} + \omega_e \varphi_{ds}Vqs=Rsiqs+dtdφqs+ωeφds
Vds=Rsids+ddtφds−ωeφqsV_{ds} = R_s i_{ds} + \frac{d}{dt} \varphi_{ds} - \omega_e \varphi_{qs}Vds=Rsids+dtdφds−ωeφqs
0=Rriqr+ddtφqr+(ωe−ωr)φdr0 = R_r i_{qr} + \frac{d}{dt} \varphi_{qr} + (\omega_e - \omega_r) \varphi_{dr}0=Rriqr+dtdφqr+(ωe−ωr)φdr
0=Rridr+ddtφdr−(ωe−ωr)φqr0 = R_r i_{dr} + \frac{d}{dt} \varphi_{dr} - (\omega_e - \omega_r) \varphi_{qr}0=Rridr+dtdφdr−(ωe−ωr)φqr
Te=1.5pLmLr(φdriqs−φqrids)T_e = 1.5 p \frac{L_m}{L_r} (\varphi_{dr} i_{qs} - \varphi_{qr} i_{ds})Te=1.5pLrLm(φdriqs−φqrids)
其中
φqs=Lsiqs+Lmiqr\varphi_{qs} = L_s i_{qs} + L_m i_{qr}φqs=Lsiqs+Lmiqr
φds=Lsids+Lmidr\varphi_{ds} = L_s i_{ds} + L_m i_{dr}φds=Lsids+Lmidr
φqr=Lriqr+Lmiqs\varphi_{qr} = L_r i_{qr} + L_m i_{qs}φqr=Lriqr+Lmiqs
φdr=Lridr+Lmids\varphi_{dr} = L_r i_{dr} + L_m i_{ds}φdr=Lridr+Lmids
磁场定向控制意味着定子电流的 idsi_{ds}ids 分量将与转子磁场对齐,而 iqsi_{qs}iqs 分量将与 KaTeX parse error: Expected '}', got 'EOF' at end of input: i_{ds 垂直。这可以通过选择 ωe\omega_eωe 作为转子磁通的速度并锁定参考坐标系系统的相位来实现,使得转子磁通精确地与 d 轴对齐,从而得到
φqr=0⇒ddtφqr=0\varphi_{qr} = 0 \Rightarrow \frac{d}{dt} \varphi_{qr} = 0φqr=0⇒dtdφqr=0
和
φdr=φr\varphi_{dr} = \varphi_rφdr=φr
这意味着
ωsl=(ωe−ωr)=(LmRrφrLr)iqs\omega_{sl} = (\omega_e - \omega_r) = \left( \frac{L_m R_r}{\varphi_r L_r} \right) i_{qs}ωsl=(ωe−ωr)=(φrLrLmRr)iqs
并且
Te=1.5pLmLr(φriqs)T_e = 1.5 p \frac{L_m}{L_r} (\varphi_r i_{qs})Te=1.5pLrLm(φriqs)
同样可得
ddtφr=−(RrLr)φr+(LmRrLr)ids\frac{d}{dt} \varphi_r = - \left( \frac{R_r}{L_r} \right) \varphi_r + \left( \frac{L_m R_r}{L_r} \right) i_{ds}dtdφr=−(LrRr)φr+(LrLmRr)ids
现在与直流电机性能的类比就很清楚了。电磁转矩与 iqsi_{qs}iqs 分量成正比,而磁通 φr\varphi_rφr 与 idsi_{ds}ids 分量之间的关系由具有时间常数 Lr/RrL_r / R_rLr/Rr 的一阶线性传递函数给出。
您无法在鼠笼式转子感应电机中直接测量转子磁通方向。只能从端部测量值估算。另一种方法是使用上面推导的转差关系来估计磁通相对于转子的位置,如图所示。后一种控制方案称为间接磁场定向控制,用于 AC3 模型。
直接转矩控制
磁场定向控制是一种有吸引力的控制方法,但它有一个严重的缺点:它严重依赖于对电机参数的精确了解。转子时间常数特别难以精确测量,并且它随温度变化。
一种更鲁棒的控制方法首先是从端部测量值在静止参考系中估算电机定子磁通和电磁转矩。使用以下关系:
φds=∫(Vds−Rsids)dt\varphi_{ds} = \int (V_{ds} - R_s i_{ds}) dtφds=∫(Vds−Rsids)dt
φqs=∫(Vqs−Rsiqs)dt\varphi_{qs} = \int (V_{qs} - R_s i_{qs}) dtφqs=∫(Vqs−Rsiqs)dt
φ^s=φds2+φqs2∠atan(φqsφds)\hat{\varphi}_s = \sqrt{\varphi_{ds}^2 + \varphi_{qs}^2} \angle \text{atan} \left( \frac{\varphi_{qs}}{\varphi_{ds}} \right)φ^s=φds2+φqs2∠atan(φdsφqs)
Te=1.5p(φdsiqs−φqsids)T_e = 1.5 p (\varphi_{ds} i_{qs} - \varphi_{qs} i_{ds})Te=1.5p(φdsiqs−φqsids)
然后,通过使用滞环比较器将估算的定子磁通和电磁转矩与它们各自的需求值进行比较,直接控制它们。然后将两个比较器的输出用作最优开关表的输入信号。下表输出逆变器的适当开关状态。
逆变器空间矢量开关表
| φ\varphiφ | TTT | S(1) | S(2) | S(3) | S(4) | S(5) | S(6) |
|---|---|---|---|---|---|---|---|
| 1 | 1 | V2V_2V2 | V3V_3V3 | V4V_4V4 | V5V_5V5 | V6V_6V6 | V1V_1V1 |
| 1 | 0 | V0V_0V0 | V7V_7V7 | V0V_0V0 | V7V_7V7 | V0V_0V0 | V7V_7V7 |
| 1 | -1 | V6V_6V6 | V1V_1V1 | V2V_2V2 | V3V_3V3 | V4V_4V4 | V5V_5V5 |
| -1 | 1 | V3V_3V3 | V4V_4V4 | V5V_5V5 | V6V_6V6 | V1V_1V1 | V2V_2V2 |
| -1 | 0 | V7V_7V7 | V0V_0V0 | V7V_7V7 | V0V_0V0 | V7V_7V7 | V0V_0V0 |
| -1 | -1 | V5V_5V5 | V6V_6V6 | V1V_1V1 | V2V_2V2 | V3V_3V3 | V4V_4V4 |
示例:交流电机驱动
在此示例中,您构建并仿真这个简单的感应电机驱动系统:
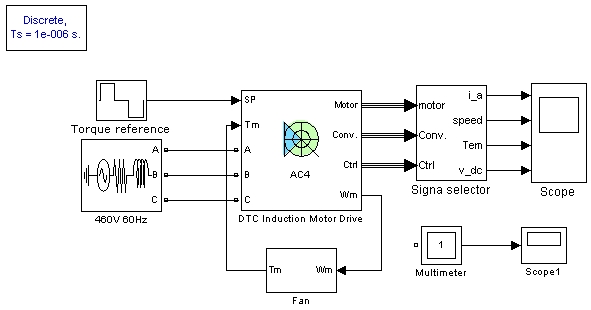
该示例说明了在转矩调节期间使用具有 200 hp 感应电机参数集的 AC4 模型。AC4 模块对 DTC 驱动进行建模。在此示例中,电机连接到风机,并仿真其对转矩阶跃的响应。
- 通过在 MATLAB® 命令提示符下键入
ac4_example来打开ac4_example。
在此示例中,我们将驱动一台额定电枢电压为 460 V、额定频率为 60 Hz 的 200 hp 感应电机。如直流示例中所述,每个驱动模型所需的电源电压幅值和频率值可在参考说明中找到。还包括相应电机的额定值。该表包含与 AC4 200 hp 模型对应的值。
| 驱动输入电压 | ||
|---|---|---|
| 幅值 | 460 V | |
| 频率 | 60 Hz | |
| 电机额定值 | ||
| 功率 | 200 hp | |
| 速度 | 1800 rpm | |
| 电压 | 460 V |
将交流电源电压幅值和频率值分别设置为 460 V 和 60 Hz。
- 将交流电源相间 RMS 电压值设置为 460 V,频率设置为 60 Hz。将交流电源命名为 460 V 60 Hz。
为了表示真实的三相电源,您必须指定正确的电源电阻 RRR 和电感 LLL 值。
- 将交流电源电阻值设置为 0.0056 Ω,电感设置为 0.15 mH。
将 AC4 模型连接到机械负载
AC4 模块的 Tm 输入表示施加到感应电机轴上的负载转矩。在这种情况下,负载转矩由风机产生阻力。这种类型的转矩通常是速度的二次函数,如公式 1 所示:
Tm=K⋅ωm2=K′⋅Nm2(1)T_m = K \cdot \omega_m^2 = K' \cdot N_m^2 \quad \text{(1)}Tm=K⋅ωm2=K′⋅Nm2(1)
其中 ωm\omega_mωm 是以 rad/s 为单位的速度,NmN_mNm 是以 rpm 为单位的速度。
- 构建下图的子系统并将其命名为 Fan。

常数 KKK 必须设定为在额定速度下,电机产生额定转矩。该转矩可以使用公式 4 确定。使用该公式,额定值为 790 N.m。最后,公式 1 给出 KKK 值为 0.022。
-
将常数值 KKK 设置为 0.022。
-
将 Fan 模块连接到模块。
定义设定点
现在定义 AC4 的设定点(SP)输入。对于此示例,感应电机转矩受控,并施加一系列转矩设定点。可以使用 Stair Generator 模块定义一系列设定点。
- 连接到 AC4 模块设定点输入的 Stair Generator 模块生成在指定时间变化的信号。在此示例中,生成以下转矩序列。
| t (s) | 转矩设定点 (N.m) |
|---|---|
| 0 | 0 |
| 0.02 | 600 |
| 0.25 | 0 |
| 0.5 | -600 |
| 0.75 | 0 |
- 将 Stair Generator 模块的 Time 字段设置为 [0.02 0.25 0.5 0.75]。将 Stair Generator 模块的 Amplitude 字段设置为 [600 0 -600 0]。
可视化内部信号
使用 AC4 模型输出来可视化感兴趣的信号,例如:
- 电机转矩值和设定点
- 电机速度
- 电机磁通幅值
- 电机定子电流
- 直流母线电压
所有电机变量值都可以通过 Motor 矢量读取。Conv. 矢量包含所有与变换器相关的数据。Ctrl 矢量包括所有参考信号和其他控制值。
Conv. 矢量的内容可以通过向模型添加 Multimeter 模块轻松确定。
根据参考说明的输入输出描述,转矩参考信号是输出矢量 Ctrl 的第一个信号。
打开 Scope Parameters 对话框。在 General 选项卡上,将坐标轴数量设置为 5,将仿真时间范围设置为 auto,并使用 25 的抽取率。清除 Data history 选项卡上的 Limit Data Points to last 复选框。将 Signal Selector 模块的五个输出连接到示波器的输入。
设置固定步长仿真环境
要仿真您的系统,您现在必须指定正确的仿真时间步长并设置固定步长求解器选项。直流驱动、交流驱动和机械模型的推荐采样时间值在相应模块参考页面的备注部分。AC4 模型的推荐采样时间为 1 µs。
-
打开 Powergui 模块。将 Simulation type 设置为 Discrete。将 Sample time 设置为 1 µs。
-
在 Simulation 选项卡中,单击 Model Settings。选择 Solver。在 Solver selection 下,选择 fixed-step 和 Discrete (no continuous states)。将 Stop time 设置为 1 s,将 Fixed-step size 设置为 1e-6。
在仿真电路之前,您必须首先设置正确的 AC4 内部参数。
设置高功率驱动参数集
如直流示例中所述,许多驱动模型有两组参数:低功率集和高功率集。默认情况下,所有模型最初都加载低功率集。当前在 ac4_example 中加载的 AC4 模型参数是 3 hp 驱动的参数。
您现在设置高功率驱动参数,即 200 hp 驱动的参数。为此,您使用用户界面的 Load 按钮,如直流示例中所述:
-
要加载 200 hp 参数,请单击 Load 按钮。
-
选择
ac4_200hp.mat文件并单击 Load。
现在已加载 200 hp 参数。
设置电机惯量值
请注意,当前在每个交流和直流模型中指定的惯量值是“空载”惯量,仅代表转子的惯量。如果电机连接到负载,则必须增加负载惯量。在这种情况下,惯量的当前值为 3.1 kgm^2。假设电机和风机的组合惯量为 10 kgm^2。请注意,使用连接在电机和风机之间的柔性轴可以解耦电机和负载惯量。在这种情况下,AC4 模块的惯量值将仅为转子和轴惯量之和。
-
在对话框的 Asynchronous Machine 部分,将惯量值更改为 10 kg*m^2。
-
单击 OK 以应用更改并关闭对话框。
设置制动斩波器电阻值
DTC 系统的三相逆变器由三相二极管整流器产生的直流电压供电。位于整流器输出端的电容器减少了直流母线电压纹波。在整流器模块和逆变器模块之间还添加了一个制动斩波器模块,以限制当电机向驱动装置反馈能量时的直流母线电压(如下所示)。当直流母线电压过高时,该能量通过电阻耗散。
制动斩波器的参数在对话框的 Converters and DC bus 部分可用。
制动斩波器参数当前设置为将直流母线电压限制在大约 700 V。关于要耗散的功率 PPP 和直流母线电压限制 VlimV_{\text{lim}}Vlim,您可以使用以下公式设置斩波器电阻值:
Rchop=Vlim2PR_{chop} = \frac{V_{\text{lim}}^2}{P}Rchop=PVlim2
3.3 Ω 的电阻将在 700 V 下耗散 200 hp。
设置直流母线初始电压值
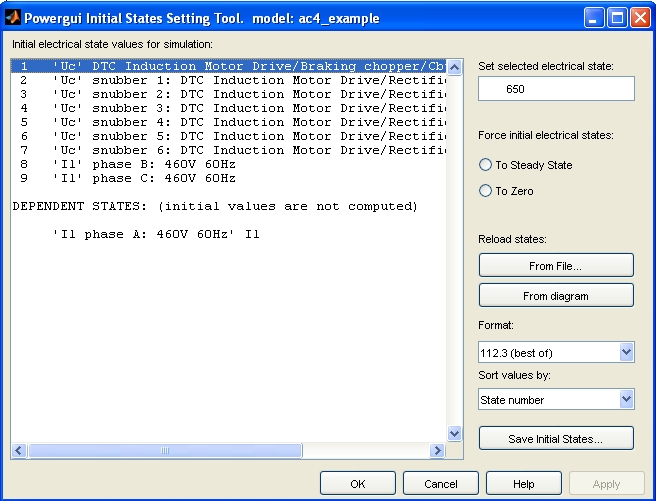
请注意,直流母线电容具有较大值,以将直流电压纹波减小到较小值。AC4 模型不包括直流母线电容器预充电系统。如果您以太小的初始母线电压开始仿真,整流器会汲取过高的初始电流为电容器充电。这些高电流值可能会损坏实际系统。您必须设置初始直流母线电压值以避免此类电流。该初始母线电压必须等于交流电源的整流峰值。如果交流电压源幅值等于 460 V RMS,则使用电容器获得的整流直流母线电压约为 460 × 2\sqrt{2}2 V。
- 打开 powergui 模块的 Initial States 工具。将 Uc_DTC Induction Motor Drive/Braking chopper/Cbus 值设置为 650 V。单击 Apply,然后单击 Close。
设置直流母线初始电压值
设置 AC4 控制器参数
AC4 的控制系统有两个主要部分:速度控制器以及转矩和磁通控制器(DTC)。有关这两个部分的信息在相应的参考说明中。为了快速了解驱动控制系统的内部结构,模型用户界面内提供了示意图。打开与 AC4 模型相关的示意图。
- 打开用户界面。单击 Controller 部分,然后单击 Schematic 按钮。您应该看到所示的控制器示意图。
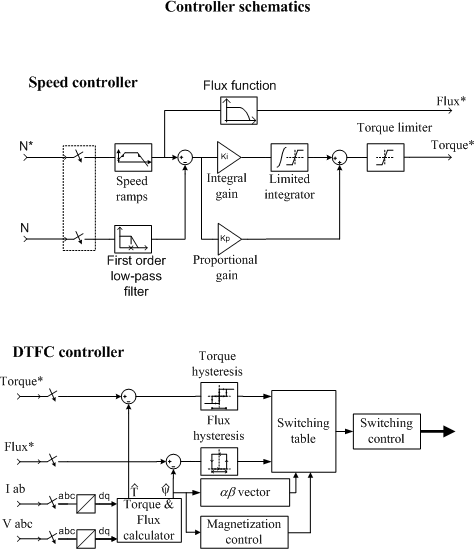
速度控制器由一个简单的比例积分调节器组成。该控制器的参数是比例和积分增益、速度斜坡值、低通滤波器截止频率、转矩参考限制和采样时间。在此示例中,我们将仅控制电机转矩;不使用速度控制器。有关如何整定 PI 控制器的更多详细信息,请参阅设置 DC3 控制器参数和仿真结果。
关于 DTC 控制器,没有太多需要整定的。参数是转矩和磁通带宽、初始机器磁通、最大开关频率和 DTC 控制器采样时间。所有这些参数都已整定,通常不应修改。
默认调节模式是速度调节。为了进行转矩调节,您必须在用户界面的 Controller 部分更改调节模式。
- 在用户界面的 Controller 部分,为 Regulation type 字段选择 Torque regulation。单击 OK 以应用更改并关闭对话框。
电路现在已准备好进行仿真。
观察电机对转矩设定点变化的快速转矩响应。从 0.02 s 到 0.25 s,由于感应电机产生的 600 N.m 加速转矩,风机速度增加。在 t = 0.25 s 时,电磁转矩跳变到 0 N.m,并且由于风机产生的负载转矩,速度下降。在 t = 0.5 s 时,电机转矩产生 -600 N.m 的转矩并允许制动风机。在制动模式下,功率被送回直流母线,母线电压升高。按计划,制动斩波器将直流母线电压限制在 700 V。在 t = 0.75 s 时,电磁转矩跳回 0 N.m,速度稳定在 -10 rpm 左右并向 0 rpm 下降。请注意,在整个仿真过程中,磁通保持在 0.8 Wb 左右。磁通和转矩振荡幅度分别略高于用户界面中指定的 0.02 Wb 和 10 N.m。这是由于 15 µs DTC 控制器采样时间、滞环控制和开关频率限制的综合影响。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 6
6 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)