基于自适应迭代无迹卡尔曼滤波算法的锂离子电池SOC估计
自适应迭代无迹卡尔曼滤波算法AIUKF锂离子电池SOC估计递推最小二乘法辩识电池参数具有良好的鲁棒性,初值误差为30%,仍能快速收敛采用马里兰大学18650电池公开数据集FUDS工况在电池管理系统(BMS)中,准确估计锂离子电池的荷电状态(SOC)至关重要。今天咱们就来聊聊基于自适应迭代无迹卡尔曼滤波算法(AIUKF)在锂离子电池SOC估计上的应用,以及递推最小二乘法在辩识电池参数中的作用。
自适应迭代无迹卡尔曼滤波算法AIUKF 锂离子电池SOC估计 递推最小二乘法辩识电池参数 具有良好的鲁棒性,初值误差为30%,仍能快速收敛 采用马里兰大学18650电池公开数据集 FUDS工况
在电池管理系统(BMS)中,准确估计锂离子电池的荷电状态(SOC)至关重要。今天咱们就来聊聊基于自适应迭代无迹卡尔曼滤波算法(AIUKF)在锂离子电池SOC估计上的应用,以及递推最小二乘法在辩识电池参数中的作用。
算法背景
- 自适应迭代无迹卡尔曼滤波算法(AIUKF)
AIUKF是一种在非线性系统状态估计中表现出色的算法。传统的卡尔曼滤波适用于线性系统,而在处理锂离子电池这种具有高度非线性特性的系统时,无迹卡尔曼滤波(UKF)更具优势。它通过UT变换来近似非线性系统的均值和协方差,而AIUKF在此基础上加入了自适应机制和迭代过程,能更好地跟踪系统状态变化。
- 递推最小二乘法辩识电池参数
要准确估计SOC,首先得对电池参数有精确了解。递推最小二乘法(RLS)是一种常用的在线参数估计方法。它通过不断更新估计值,在每次获得新的数据时,以最小化误差平方和为目标来调整参数估计,从而快速准确地辨识电池参数。
数据集与工况
此次研究采用了马里兰大学18650电池公开数据集,并且是在FUDS工况下进行分析。FUDS(Federal Urban Driving Schedule)工况模拟了城市驾驶过程中频繁的加速、减速、停车等复杂情况,非常贴近实际应用场景,能更好地验证算法在真实条件下的性能。
代码实现与分析
递推最小二乘法代码示例(Python)
import numpy as np
def rls(y, x, theta_hat, P, lamda=1):
# y为测量值,x为输入向量,theta_hat为参数估计值,P为协方差矩阵,lamda为遗忘因子
K = P.dot(x) / (lamda + x.dot(P).dot(x))
theta_hat = theta_hat + K * (y - x.dot(theta_hat))
P = (np.eye(len(theta_hat)) - K.dot(x)).dot(P) / lamda
return theta_hat, P
# 假设初始化参数
theta_hat = np.array([0.1, 0.2])
P = np.eye(2)
# 模拟数据输入
x = np.array([1, 2])
y = 3
theta_hat, P = rls(y, x, theta_hat, P)
print("更新后的参数估计值:", theta_hat)
print("更新后的协方差矩阵:", P)在这段代码中,rls函数实现了递推最小二乘法。首先计算增益矩阵K,它决定了新数据对参数估计更新的影响程度。然后根据增益矩阵K来更新参数估计值thetahat,通过测量值y与预测值x.dot(thetahat)的误差来修正估计。最后更新协方差矩阵P,反映估计的不确定性。
AIUKF部分代码示例(Python,简化示意)
import numpy as np
def aiukf_predict(x_hat, P, Q, f, h, R, alpha, beta, kappa):
n = len(x_hat)
lambda_ = alpha ** 2 * (n + kappa) - n
Wm = np.zeros(2 * n + 1)
Wc = np.zeros(2 * n + 1)
Wm[0] = lambda_ / (n + lambda_)
Wc[0] = lambda_ / (n + lambda_) + (1 - alpha ** 2 + beta)
for i in range(1, 2 * n + 1):
Wm[i] = 1 / (2 * (n + lambda_))
Wc[i] = 1 / (2 * (n + lambda_))
sigma_points = np.zeros((2 * n + 1, n))
sigma_points[0] = x_hat
for i in range(n):
sigma_points[i + 1] = x_hat + np.sqrt((n + lambda_) * P)[i]
sigma_points[n + i + 1] = x_hat - np.sqrt((n + lambda_) * P)[i]
# 预测步骤
x_hat_pred = np.zeros(n)
for i in range(2 * n + 1):
x_hat_pred = x_hat_pred + Wm[i] * f(sigma_points[i])
P_pred = np.zeros((n, n))
for i in range(2 * n + 1):
y = f(sigma_points[i]) - x_hat_pred
P_pred = P_pred + Wc[i] * y.reshape(-1, 1).dot(y.reshape(1, -1))
P_pred = P_pred + Q
return x_hat_pred, P_pred
def aiukf_update(x_hat_pred, P_pred, z, h, R, alpha, beta, kappa):
n = len(x_hat_pred)
lambda_ = alpha ** 2 * (n + kappa) - n
Wm = np.zeros(2 * n + 1)
Wc = np.zeros(2 * n + 1)
Wm[0] = lambda_ / (n + lambda_)
Wc[0] = lambda_ / (n + lambda_) + (1 - alpha ** 2 + beta)
for i in range(1, 2 * n + 1):
Wm[i] = 1 / (2 * (n + lambda_))
Wc[i] = 1 / (2 * (n + lambda_))
sigma_points = np.zeros((2 * n + 1, n))
sigma_points[0] = x_hat_pred
for i in range(n):
sigma_points[i + 1] = x_hat_pred + np.sqrt((n + lambda_) * P_pred)[i]
sigma_points[n + i + 1] = x_hat_pred - np.sqrt((n + lambda_) * P_pred)[i]
z_pred = np.zeros(len(z))
for i in range(2 * n + 1):
z_pred = z_pred + Wm[i] * h(sigma_points[i])
Pzz = np.zeros((len(z), len(z)))
Pxz = np.zeros((n, len(z)))
for i in range(2 * n + 1):
y = h(sigma_points[i]) - z_pred
Pzz = Pzz + Wc[i] * y.reshape(-1, 1).dot(y.reshape(1, -1))
y1 = sigma_points[i] - x_hat_pred
Pxz = Pxz + Wc[i] * y1.reshape(-1, 1).dot(y.reshape(1, -1))
Pzz = Pzz + R
K = Pxz.dot(np.linalg.inv(Pzz))
x_hat = x_hat_pred + K.dot(z - z_pred)
P = P_pred - K.dot(Pzz).dot(K.T)
return x_hat, P
# 假设一些简单的函数f和h
def f(x):
return x + 0.1
def h(x):
return x + 0.05
# 初始化参数
x_hat = np.array([0.5])
P = np.array([[0.1]])
Q = np.array([[0.001]])
R = np.array([[0.01]])
alpha = 0.001
beta = 2
kappa = 0
z = np.array([0.6])
x_hat_pred, P_pred = aiukf_predict(x_hat, P, Q, f, h, R, alpha, beta, kappa)
x_hat, P = aiukf_update(x_hat_pred, P_pred, z, h, R, alpha, beta, kappa)
print("更新后的状态估计值:", x_hat)
print("更新后的协方差矩阵:", P)这段代码简单示意了AIUKF的预测和更新步骤。在预测步骤中,首先计算西格玛点,通过加权计算预测状态均值和协方差。更新步骤则基于测量值进一步修正预测结果,通过计算卡尔曼增益K,利用测量值与预测值的误差来更新状态估计值和协方差矩阵。
算法性能
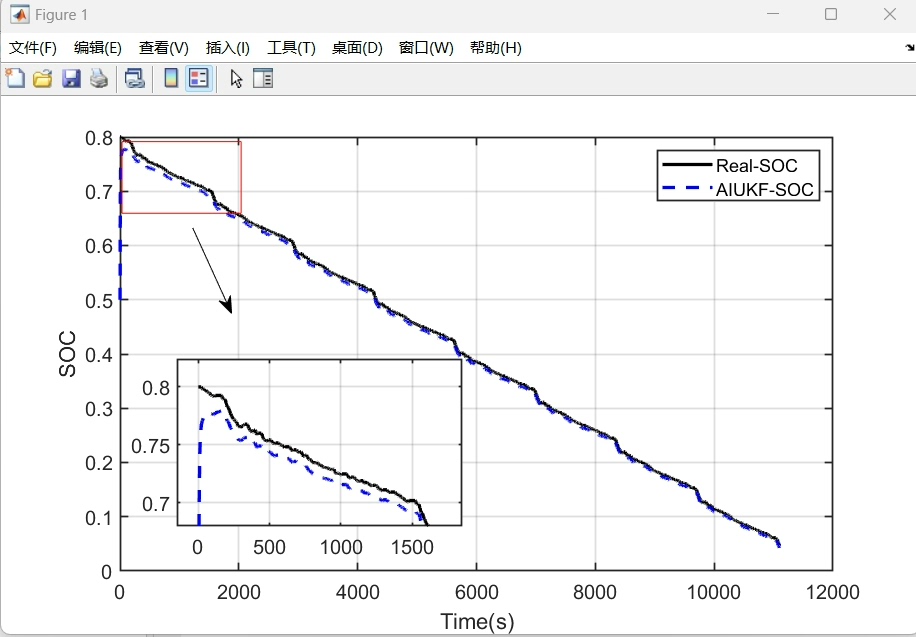
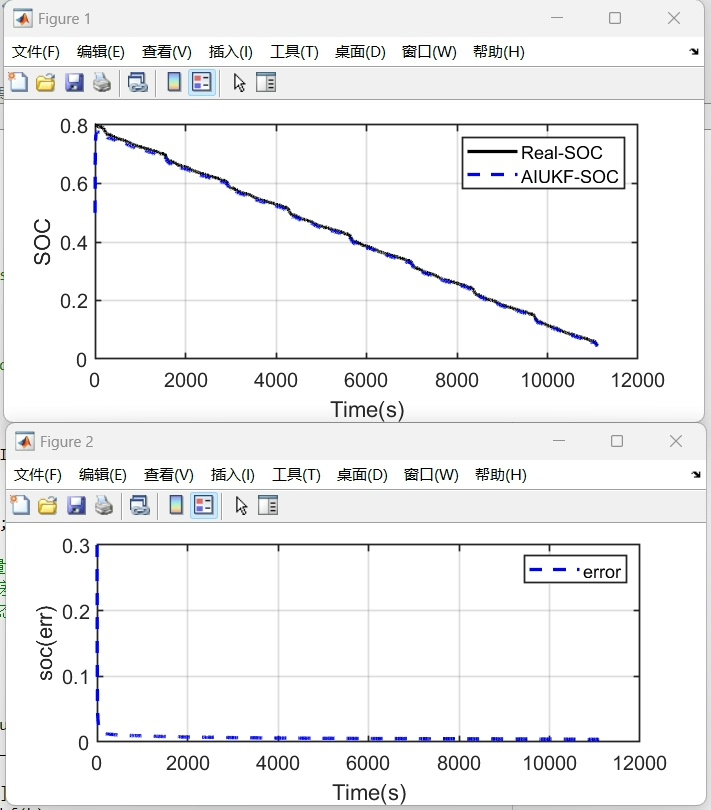
该方法具有良好的鲁棒性,即使初值误差高达30%,仍能快速收敛到准确的SOC估计值。这意味着在实际应用中,即使初始估计不准确,算法也能迅速调整,给出可靠的SOC估计,大大提升了电池管理系统的可靠性和稳定性。
自适应迭代无迹卡尔曼滤波算法AIUKF 锂离子电池SOC估计 递推最小二乘法辩识电池参数 具有良好的鲁棒性,初值误差为30%,仍能快速收敛 采用马里兰大学18650电池公开数据集 FUDS工况
综上所述,基于AIUKF的锂离子电池SOC估计结合递推最小二乘法辩识电池参数,在FUDS工况下展现出优异的性能,为锂离子电池在复杂实际场景中的应用提供了有力的技术支持。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)