多智能体编队与避障:从理论到实践
多智能体编队与避障#人工势场#多智能体#编队#避障#拓扑结构#队形变换在智能体协同作业的领域中,多智能体编队与避障是一个极具挑战性和趣味性的话题。想象一下,一群无人机需要以特定的编队飞行,同时还要巧妙地避开途中的各种障碍物,这背后涉及到诸多复杂的技术,而人工势场法便是其中常用的一种。
多智能体编队与避障 #人工势场#多智能体#编队#避障#拓扑结构#队形变换
在智能体协同作业的领域中,多智能体编队与避障是一个极具挑战性和趣味性的话题。想象一下,一群无人机需要以特定的编队飞行,同时还要巧妙地避开途中的各种障碍物,这背后涉及到诸多复杂的技术,而人工势场法便是其中常用的一种。
人工势场法基础
人工势场法的核心思想是将环境中的障碍物视为产生斥力的源,而目标点则产生引力。智能体就像是在这个虚拟的势场中运动的粒子,受到引力和斥力的共同作用,从而朝着目标点移动并避开障碍物。
简单用 Python 代码来模拟一下这个基本的引力和斥力计算:
import math
# 定义引力计算函数
def attractive_force(agent_pos, goal_pos, k_att):
direction = [goal_pos[0] - agent_pos[0], goal_pos[1] - agent_pos[1]]
distance = math.sqrt(direction[0] ** 2 + direction[1] ** 2)
force_magnitude = k_att * distance
force = [force_magnitude * direction[0] / distance, force_magnitude * direction[1] / distance]
return force
# 定义斥力计算函数
def repulsive_force(agent_pos, obs_pos, k_rep, d0):
direction = [agent_pos[0] - obs_pos[0], agent_pos[1] - obs_pos[1]]
distance = math.sqrt(direction[0] ** 2 + direction[1] ** 2)
if distance < d0:
force_magnitude = k_rep * (1 / distance - 1 / d0) / (distance ** 2)
force = [force_magnitude * direction[0] / distance, force_magnitude * direction[1] / distance]
else:
force = [0, 0]
return force
在上述代码中,attractiveforce 函数计算了智能体受到目标点的引力。它首先计算智能体到目标点的方向向量 direction,然后得出距离 distance。引力大小 forcemagnitude 与距离成正比,比例系数为 k_att。最后根据方向向量和引力大小计算出引力向量。
repulsiveforce 函数计算智能体受到障碍物的斥力。当智能体与障碍物的距离小于某个阈值 d0 时,才会产生斥力,斥力大小与距离的平方成反比,比例系数为 krep。如果距离大于 d0,则斥力为零。
多智能体编队中的应用
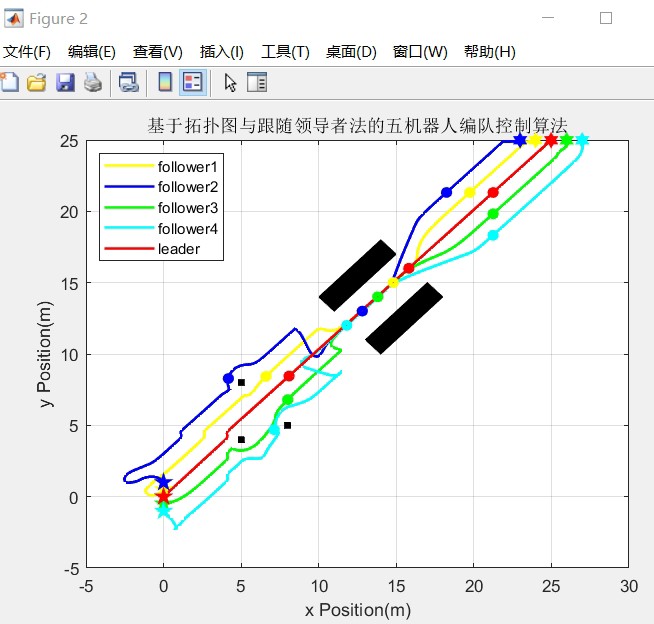
在多智能体编队中,除了考虑单个智能体的避障,还要维持特定的编队拓扑结构。常见的拓扑结构有链式、环形等。以链式编队为例,每个智能体不仅要受到目标点的引力和障碍物的斥力,还要与相邻智能体保持一定的相对位置关系。
多智能体编队与避障 #人工势场#多智能体#编队#避障#拓扑结构#队形变换
假设我们用一个列表来表示智能体的位置 agentpositions = [[x1, y1], [x2, y2],...],并且设定相邻智能体之间的期望距离为 ddesired。下面是一段代码来计算相邻智能体间的相互作用力:
# 计算相邻智能体间的相互作用力
def inter_agent_force(agent_positions, d_desired, k_inter):
forces = []
num_agents = len(agent_positions)
for i in range(num_agents):
force = [0, 0]
if i > 0:
direction = [agent_positions[i][0] - agent_positions[i - 1][0],
agent_positions[i][1] - agent_positions[i - 1][1]]
distance = math.sqrt(direction[0] ** 2 + direction[1] ** 2)
force_magnitude = k_inter * (distance - d_desired)
force[0] += force_magnitude * direction[0] / distance
force[1] += force_magnitude * direction[1] / distance
if i < num_agents - 1:
direction = [agent_positions[i + 1][0] - agent_positions[i][0],
agent_positions[i + 1][1] - agent_positions[i][1]]
distance = math.sqrt(direction[0] ** 2 + direction[1] ** 2)
force_magnitude = k_inter * (distance - d_desired)
force[0] -= force_magnitude * direction[0] / distance
force[1] -= force_magnitude * direction[1] / distance
forces.append(force)
return forces
在这段代码里,interagentforce 函数对每个智能体进行遍历。对于每个智能体,它会检查其前后是否有相邻智能体。如果有,就计算与相邻智能体的距离,若距离偏离期望距离 ddesired,则产生一个作用力来调整位置,使得智能体间保持合适的间距。这个作用力的大小由比例系数 kinter 控制。
队形变换
多智能体系统有时还需要进行队形变换,从一种拓扑结构转换到另一种。这就需要在运行过程中动态调整智能体之间的相对位置关系。一种简单的方法是通过改变期望距离 ddesired 或者调整智能体间相互作用力的系数 kinter 来实现。
例如,我们想要从链式编队变换到环形编队,就可以逐步改变每个智能体与相邻智能体的期望距离,使得它们逐渐形成一个环形。这个过程需要对每个时间步的智能体位置和作用力进行精细的调整。
# 假设我们要进行队形变换,这里简单示意改变期望距离
def change_form(agent_positions, new_d_desired, k_inter):
for step in range(100): # 假设用100步完成变换
forces = inter_agent_force(agent_positions, new_d_desired, k_inter)
for i in range(len(agent_positions)):
agent_positions[i][0] += forces[i][0]
agent_positions[i][1] += forces[i][1]
return agent_positions
在 changeform 函数中,我们通过多次调用 interagent_force 函数来更新智能体受到的相互作用力,并根据这些力来逐步调整智能体的位置,在设定的步数内完成队形变换。
多智能体编队与避障是一个复杂而又充满魅力的领域,结合人工势场法、拓扑结构设计以及队形变换等技术,能够实现智能体在复杂环境中的高效协同作业。以上代码只是简单的原理性示例,实际应用中还需要考虑更多的因素,如智能体的动力学模型、环境的实时感知与更新等。但希望这些内容能为你打开探索多智能体世界的一扇窗。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)