基于事件触发的深度强化学习自动驾驶决策与多智能体系统协同控制研究
不过事件触发也不是万能药,去年有个团队翻车案例:某自动驾驶测试车在弯道突然停止控制更新,结果怼护栏上了。比如用LSTM预测未来几秒的状态轨迹,提前预估该不该触发,这招在2022年那篇RL+MPC的论文里有详细实现。有团队在传感器数据预处理环节加事件触发过滤,把无效点云数据直接丢掉,能让激光雷达的处理功耗降低30%。这代码把时间触发和状态触发做了个逻辑或,既防止长期不通信导致失联,又在状态突变时及时
事件触发控制代码+对应参考文献 1.2023IEEE TRANS 顶刊基于事件触发的深度强化学习自动驾驶决策(CCF-A) 2.多智能体分布式系统的事件触发控制 3.基于观测器的非理想线性多智能体事件触发的跟踪一致性 4.非线性不确定扰动多智能体系统固定时间事件触发一致性控制 5.固定拓扑和切换多智能体分布式动态事件触发控制 6.线性多智能体全分布式事件触发协议算法 7.有限时间约束下的分布式事件触发控制方法 更新:1.7 8.网络控制系统(NSS)事件触发控制器 9.2022CCC(中国控制会议)基于车辆编队感知传输调度的事件触发分布式MPC控制 10.2022-基于强化学习的事件触发MPC用于自动驾驶 11.线性多智能体网络分布式事件触发控制 12.多智能体中基于事件触发的协议
最近在自动驾驶决策里,事件触发控制突然成了技术宅们的口头禅。传统控制算法像闹钟似的定期执行,甭管有没有突发情况都得按点干活,但现实路况里哪能这么老实?某辆卡车突然变道时,控制算法要能像老司机一样瞬间进入战斗状态才对。
拿深度强化学习(DRL)和事件触发搞CP的玩法举例,核心在于让算法自己判断什么时候该更新策略。下面这段简化版DRL事件触发逻辑,看着像不像给AI装了个"偷懒开关"?
class EventTriggeredDRL:
def __init__(self, threshold=0.05):
self.last_state = None
self.threshold = threshold # 触发阈值
def should_update(self, current_state):
if self.last_state is None:
return True
delta = np.linalg.norm(current_state - self.last_state)
# 事件触发条件
return delta > self.threshold
def drive_policy_update(self, state):
if self.should_update(state):
# 触发策略网络更新(此处简化实际DRL训练过程)
new_policy = self.train_network(state)
self.last_state = state.copy()
return new_policy
return None这个threshold参数相当于控制器的敏感度调节器。设得太低会导致频繁更新(跟定时控制没区别),设太高可能漏掉关键状态变化。2023年那篇IEEE顶刊里提到用双层事件触发机制,把环境突变和模型误差两个因素分开处理,比这种单一阈值方案更抗干扰。
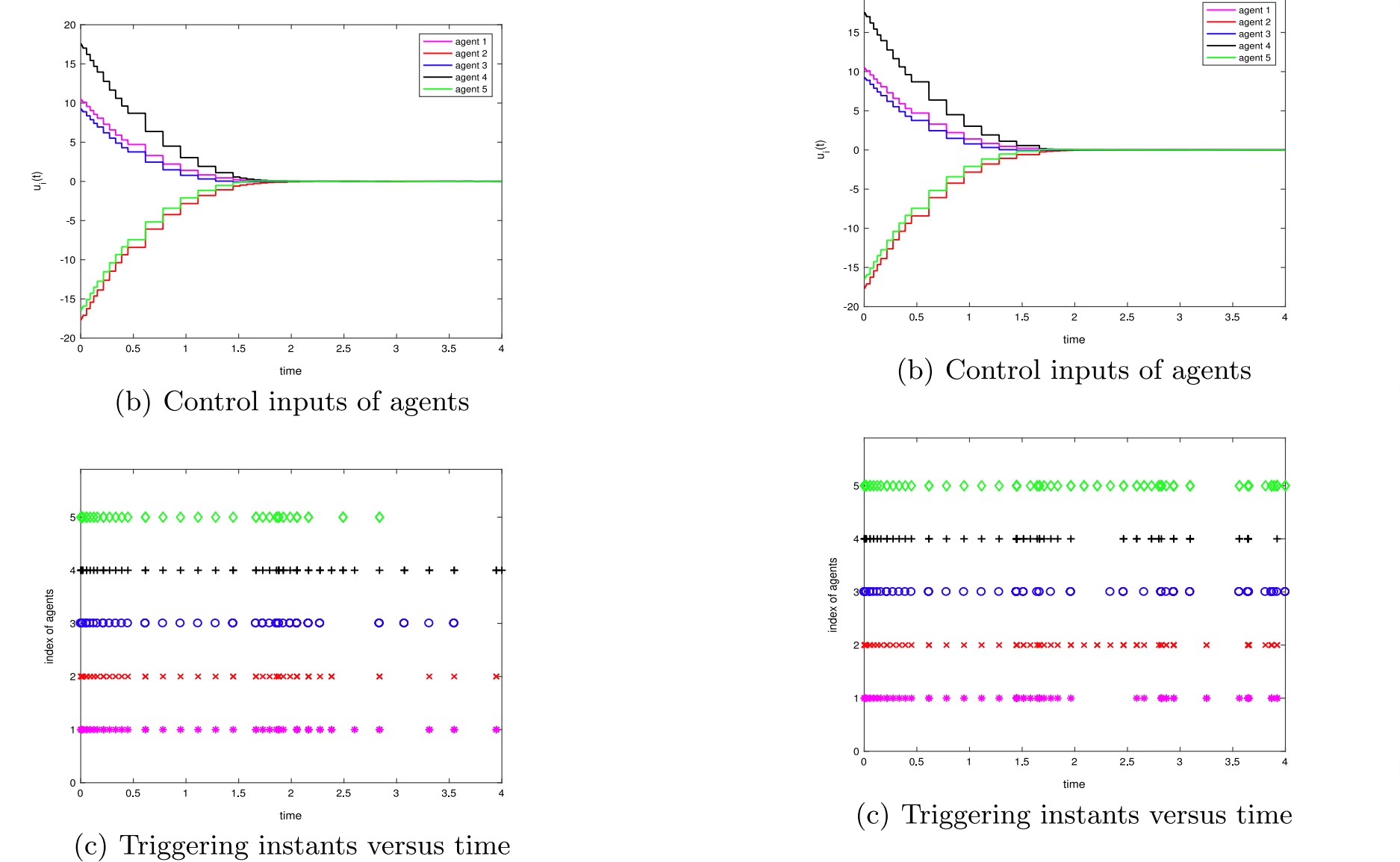
说到多车协同的场景就更带劲了。传统分布式控制每200ms就要同步一次数据,要是搞个20辆车编队,通信带宽直接爆炸。某篇CCC论文给出的解决方案是让每辆车自带"社交牛逼症"判断逻辑:
% 车辆间事件触发通信协议(简化版)
function transmit = check_trigger(ego_state, neigh_states)
persistent last_transmit_time
if isempty(last_transmit_time)
last_transmit_time = 0;
end
current_time = get_sim_time();
time_condition = (current_time - last_transmit_time) >= 1.0; % 最低1秒保底
state_change = 0;
for state in neigh_states
state_change += norm(ego_state.pos - state.pos)^2;
end
state_condition = sqrt(state_change) > 0.5; % 位置变化阈值
transmit = time_condition || state_condition;
if transmit
last_transmit_time = current_time;
end
end这代码把时间触发和状态触发做了个逻辑或,既防止长期不通信导致失联,又在状态突变时及时响应。实测能把编队控制的通信量砍掉60%以上,堪比给车装了流量套餐。
事件触发控制代码+对应参考文献 1.2023IEEE TRANS 顶刊基于事件触发的深度强化学习自动驾驶决策(CCF-A) 2.多智能体分布式系统的事件触发控制 3.基于观测器的非理想线性多智能体事件触发的跟踪一致性 4.非线性不确定扰动多智能体系统固定时间事件触发一致性控制 5.固定拓扑和切换多智能体分布式动态事件触发控制 6.线性多智能体全分布式事件触发协议算法 7.有限时间约束下的分布式事件触发控制方法 更新:1.7 8.网络控制系统(NSS)事件触发控制器 9.2022CCC(中国控制会议)基于车辆编队感知传输调度的事件触发分布式MPC控制 10.2022-基于强化学习的事件触发MPC用于自动驾驶 11.线性多智能体网络分布式事件触发控制 12.多智能体中基于事件触发的协议
不过事件触发也不是万能药,去年有个团队翻车案例:某自动驾驶测试车在弯道突然停止控制更新,结果怼护栏上了。后来发现是路面颠簸导致的事件误触发,现在主流方案都在搞动态阈值调整。比如用LSTM预测未来几秒的状态轨迹,提前预估该不该触发,这招在2022年那篇RL+MPC的论文里有详细实现。
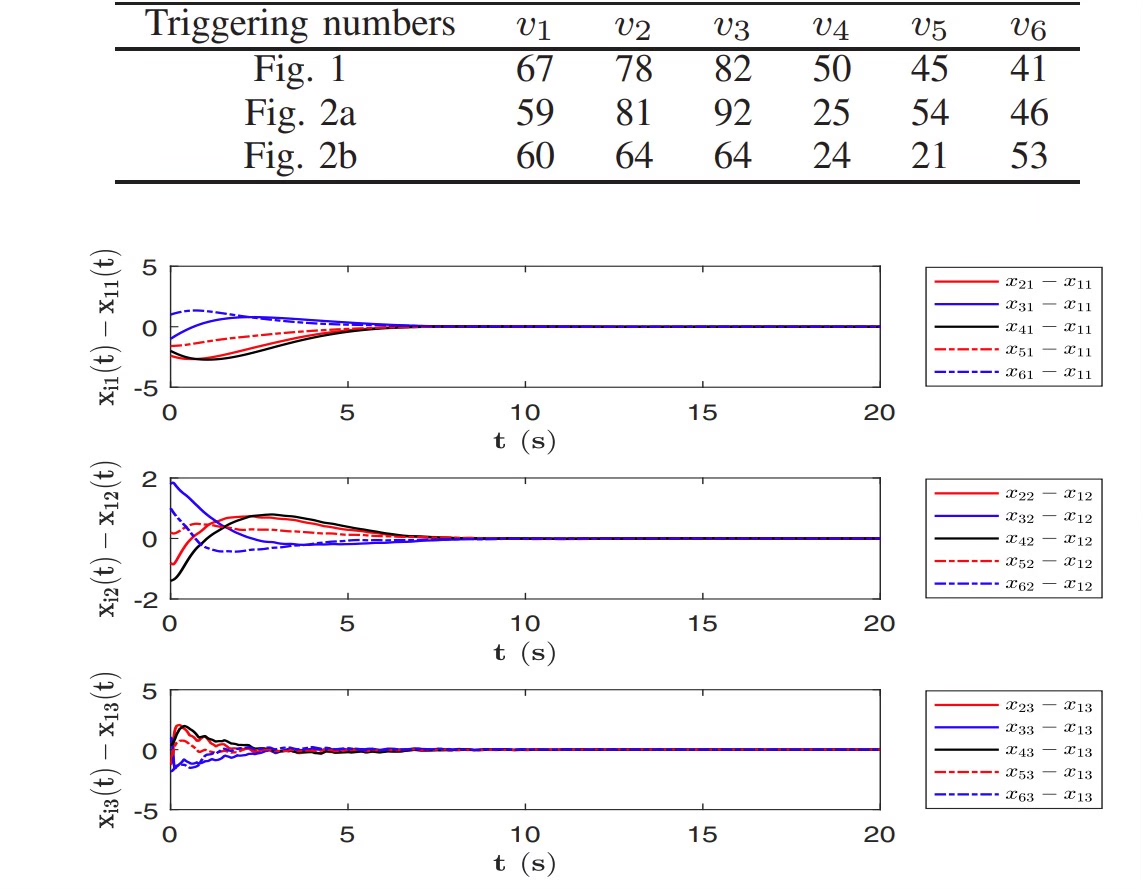
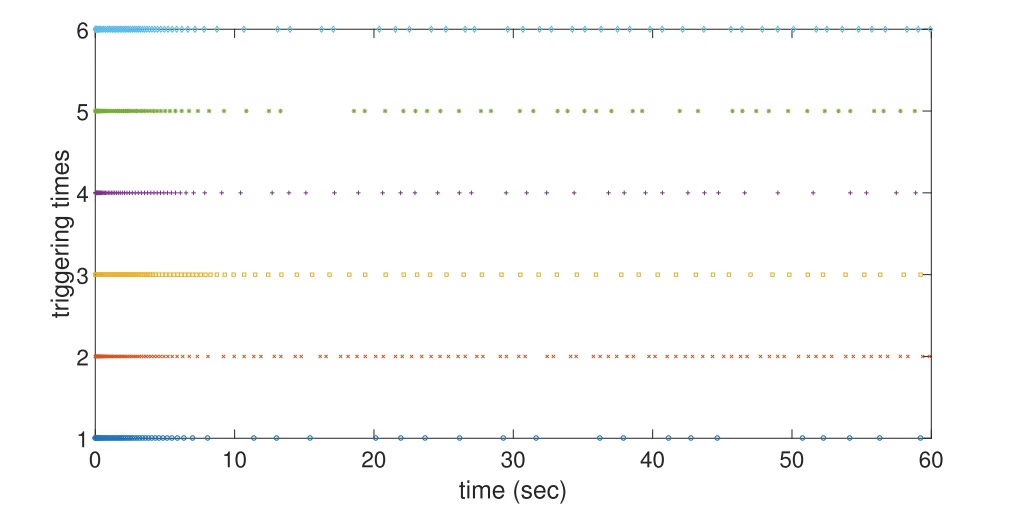
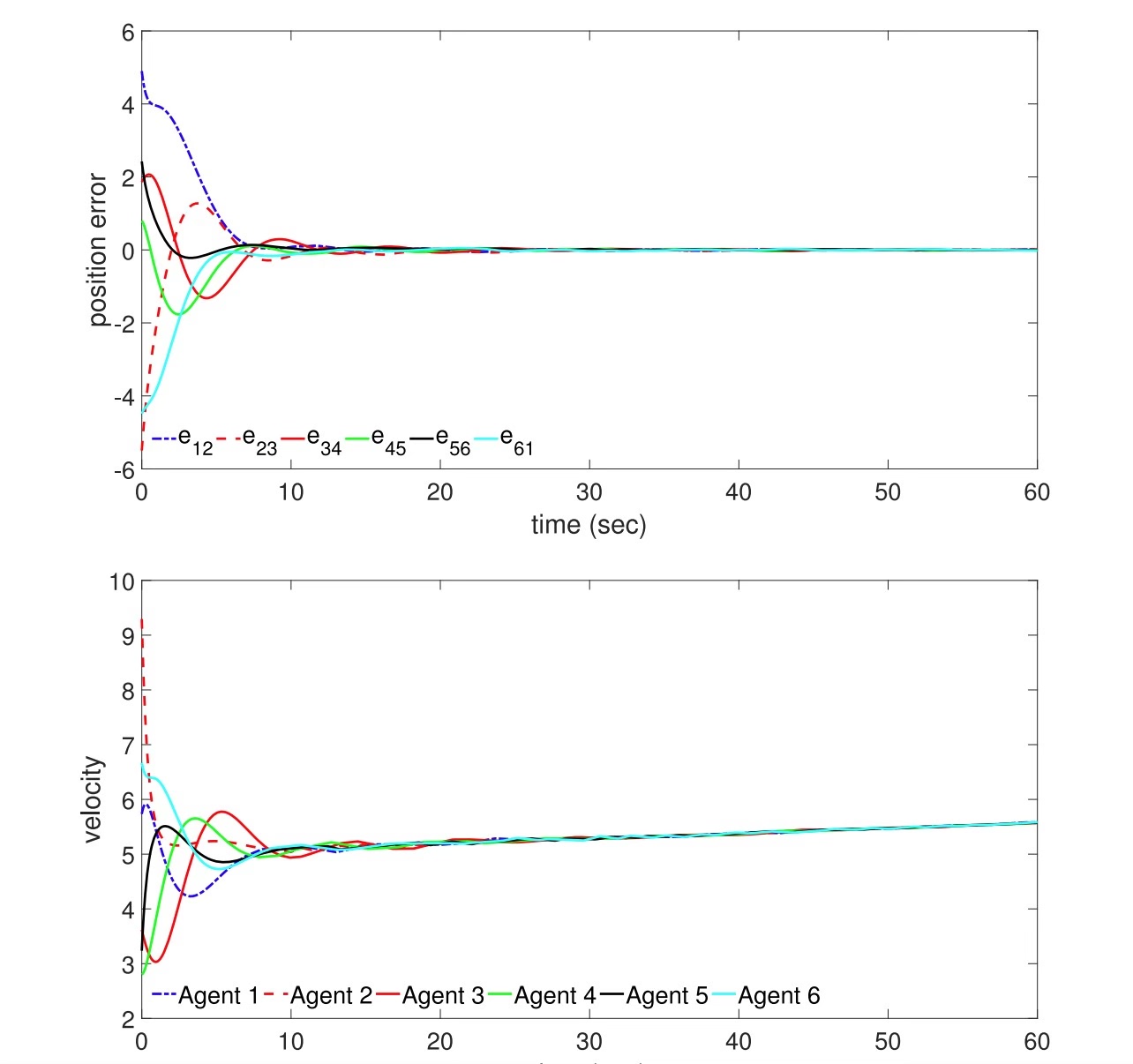
玩事件触发最骚的操作还是固定时间收敛控制,不管初始状态多离谱,保证在设定时间内达成共识。核心在于设计了带指数项的事件触发条件:
def dynamic_threshold(t, t_max):
return 1/(t_max - t + 1e-6) # 防止除零
while simulation_running:
current_time = get_time()
threshold = dynamic_threshold(current_time, t_max=10) # 10秒内必须收敛
if state_error > threshold:
update_control()
reset_trigger_counter()
else:
if check_secondary_condition(): # 防死锁机制
force_update()这种时间相关的动态阈值,像给系统上了发条,越接近deadline触发越频繁。不过实际部署时要加个安全上限,别最后几毫秒搞出计算过载。
事件触发控制现在连机械臂都在用,但自动驾驶场景的特殊性在于环境感知存在显著延迟。有团队在传感器数据预处理环节加事件触发过滤,把无效点云数据直接丢掉,能让激光雷达的处理功耗降低30%。这思路要是能普及,电动车续航说不定还能再涨个几公里。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 18
18 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)