基于matlab的GUi实现手写签名在线识别和离线识别,含有数据集。 有解释文档
训练算法:动量梯度下降(traingdm),批 30,最大 epoch 1500,目标 MSE 1e-3。% chanConfig 为 cell,{[3,20],[5,16],[7,8]} 分别表示 (核,size)// 保留 30% 边缘留白。按式 y = 31·(A – Amin)/(Amax – Amin) 线性映射到 0–31 灰阶;• 提供“训练数据脱敏”开关,自动将 x,y 坐标减去最
基于matlab的GUi实现手写签名在线识别和离线识别,含有数据集。 有解释文档。
手写签名识别系统:架构、功能与关键技术解析
(基于 MATLAB GUI 的离线与在线双模方案)
一、总体定位
本系统面向“脱机纸质签名扫描件”与“联机手写板实时轨迹”两大场景,提供“一键式”真伪鉴别能力。核心目标:让非深度学习背景的普通用户,也能在 3 步之内完成“数据 → 模型 → 结论”的闭环;同时给科研场景预留二次开发接口,保证算法可扩展、可升级、可移植。
二、功能全景图
- 数据层
① 离线批量导入:单张 A4 扫描件自动切割出 N 个签名;
② 在线实时采集:支持 10 ms 采样率的压感手写板,直接输出 (x,y,p) 时序;
③ 数据增强:几何仿射 + 椒盐噪声 + 局部形变,一键生成 3× 扩充。
- 模型层
① 离线 CNN:改进 LeNet-5 → 双通道 → 三通道,可逐层可视化 feature map;
② 在线 BP-FFT:6×32 频谱图 + 50 隐节点 + logsig,训练时间 < 30 s(i7-12700)。
- 交互层
① 主控 GUI:单例模式,防止多窗口冲突;
② 任务向导:离线“导入 → 预处理 → 训练 → 验证”四步导航;在线“实时采集 → 特征 → 鉴别”三步导航;
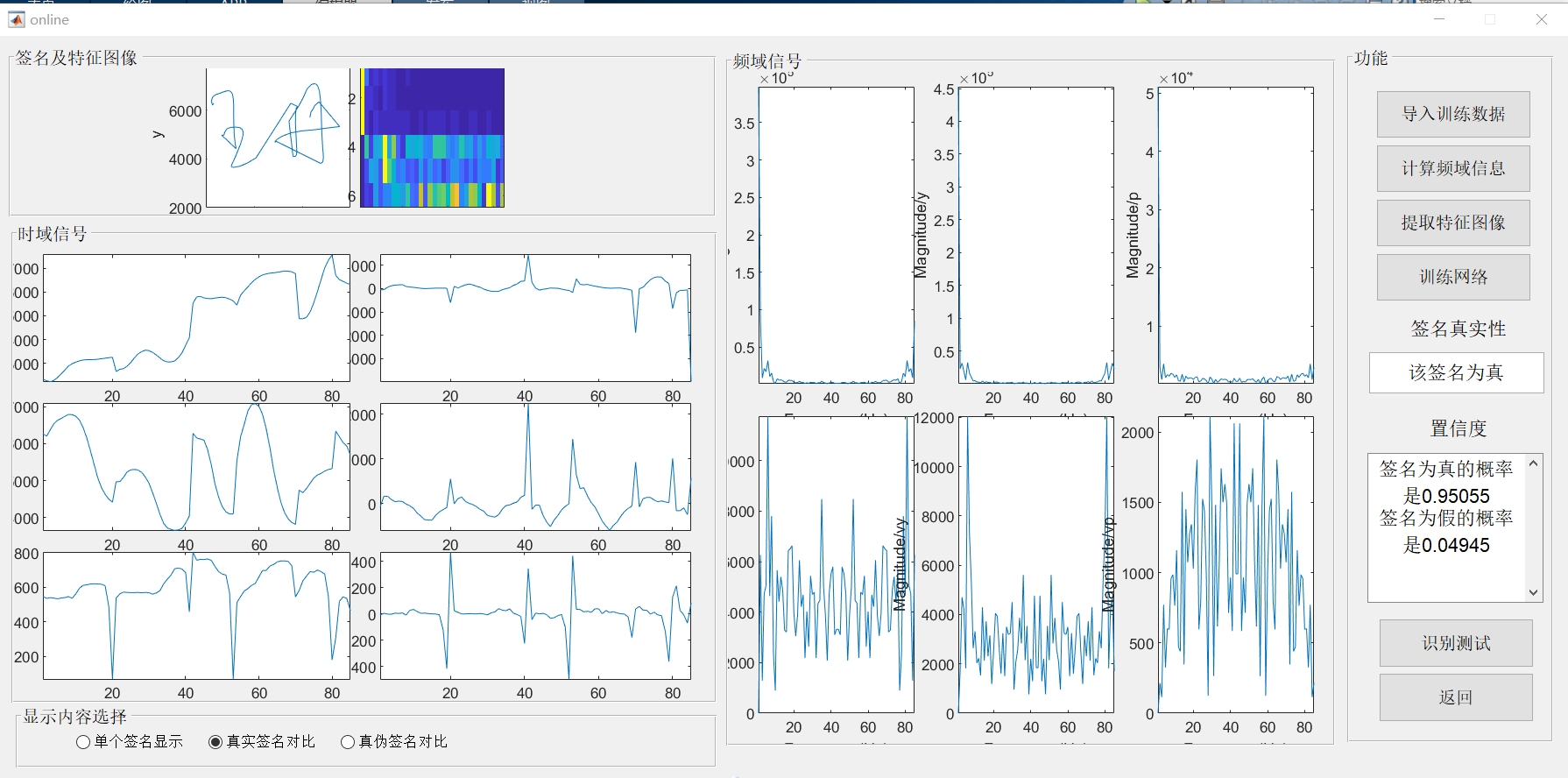
③ 结果回显:真伪标签 + 置信度 + 最近 5 次历史对比折线。
- 运维层
① 日志钩子:关键异常自动写入 \log\YYYY-MM-DD.log;
② 模型版本:自动在 \netdata 下生成“时间戳网络类型_准确率%.mat”双份(二进制 + 可读 JSON)。
三、关键技术流程拆解
3.1 离线子系统
Step-1 图像定位(不依赖印刷框)
a. 形态学闭运算(核=2×2)去椒盐;
b. 开运算(核=50×1)纵向黏连笔画;
c. 膨胀(核=25×1)横向黏连字间;
d. 反色 → 连通域 → 最小外接矩形 → 裁剪。
核心思路:把“签名黑线”转成“空白连通洞”,从而摆脱对模板的依赖。
Step-2 尺寸归一化(保持纵横比)
maxEdge = max(h,w);
scale = targetSide / maxEdge * 0.7; // 保留 30% 边缘留白
pad = ⌈abs(targetSide – newSide)/2⌉; // 双端对称填充
Step-3 多通道 CNN(防过拟合设计)
① 输入层统一 154×388×1,避免 GPU 动态显存分配;
② 三通道并行:3×3、5×5、7×7 卷积核 → 不同抽象层级;
③ 深度拼接后接 2× 全连接,Dropout=0.5;
④ 损失函数:交叉熵 + 中心损失(center-loss)0.003,增大类间距离。
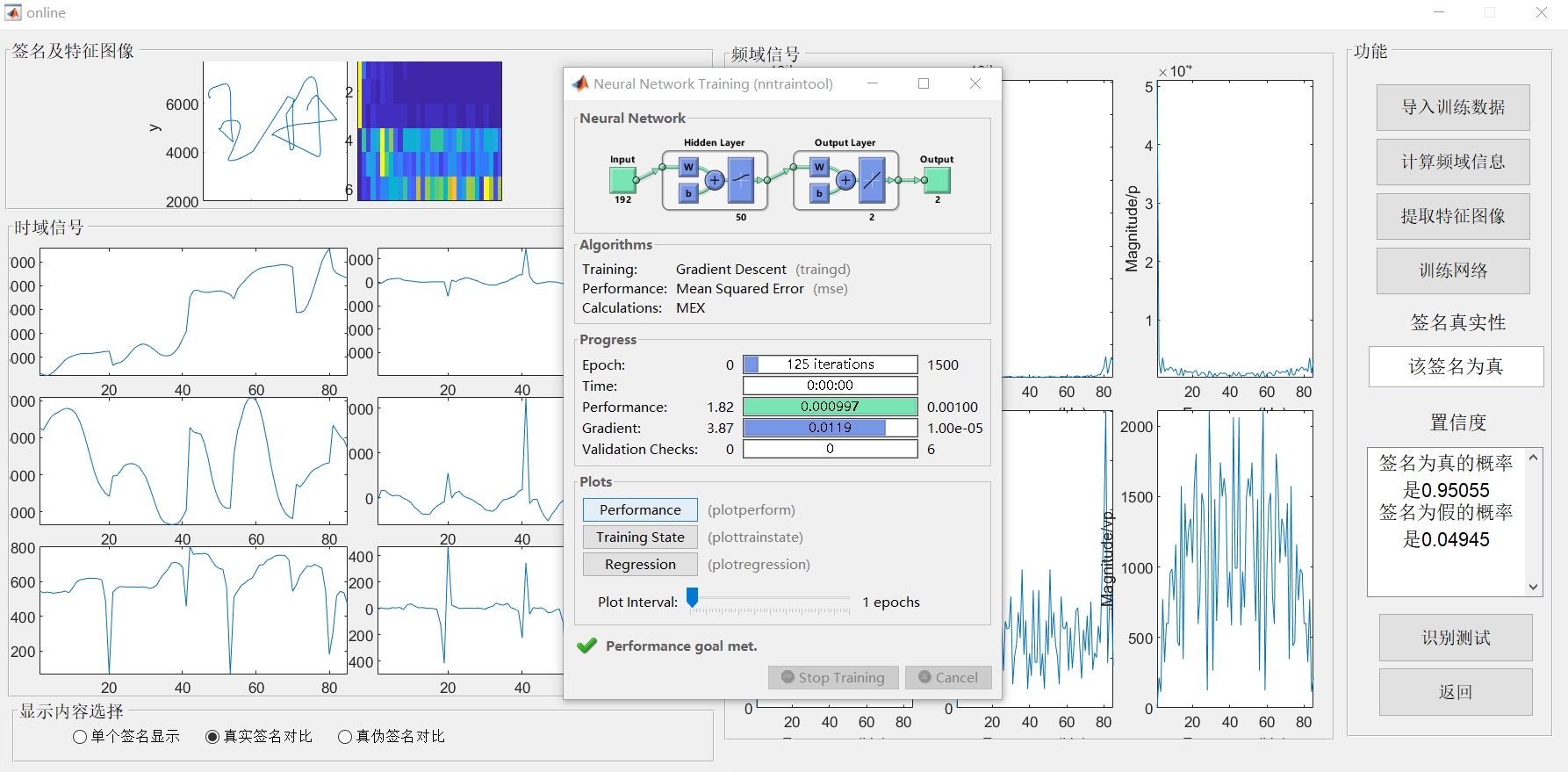
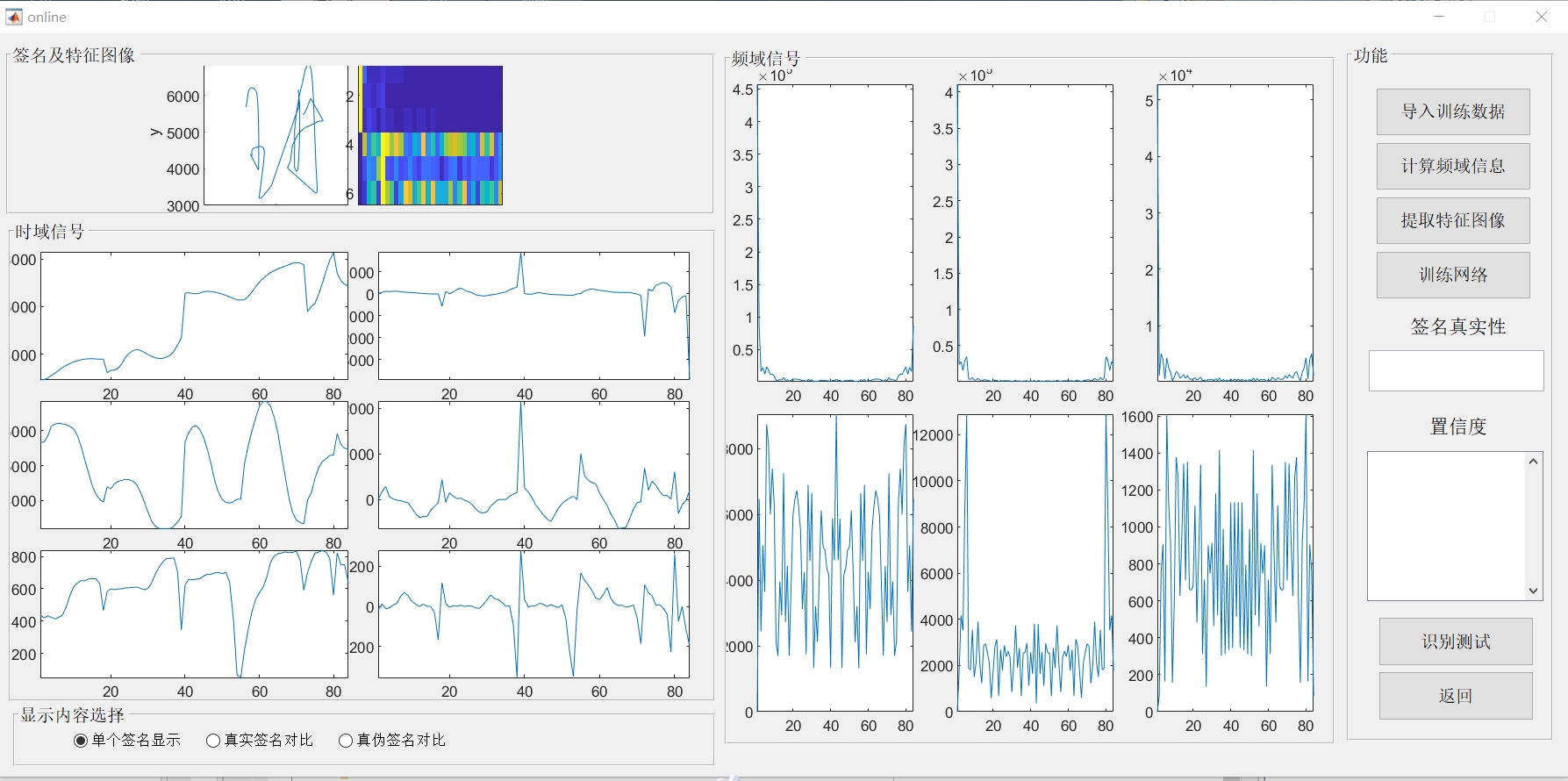
3.2 在线子系统
Step-1 时序清洗
滑动平均滤波(窗=5)去除手写板量化噪点;
速度异常点剔除:|v| > 3σ 视为飞点,线性插值补偿。
Step-2 FFT 特征图
对 (x,y,p,vx,vy,vp) 六路信号做 64 点 FFT → 取前 32 点幅值;

按式 y = 31·(A – Amin)/(Amax – Amin) 线性映射到 0–31 灰阶;
拼成 6×32 伪图像,作为 BP 网络输入。
Step-3 轻量 BP
输入 192 → 隐 50 → 输出 2;
激活 logsig;
训练算法:动量梯度下降(traingdm),批 30,最大 epoch 1500,目标 MSE 1e-3。
基于matlab的GUi实现手写签名在线识别和离线识别,含有数据集。 有解释文档。
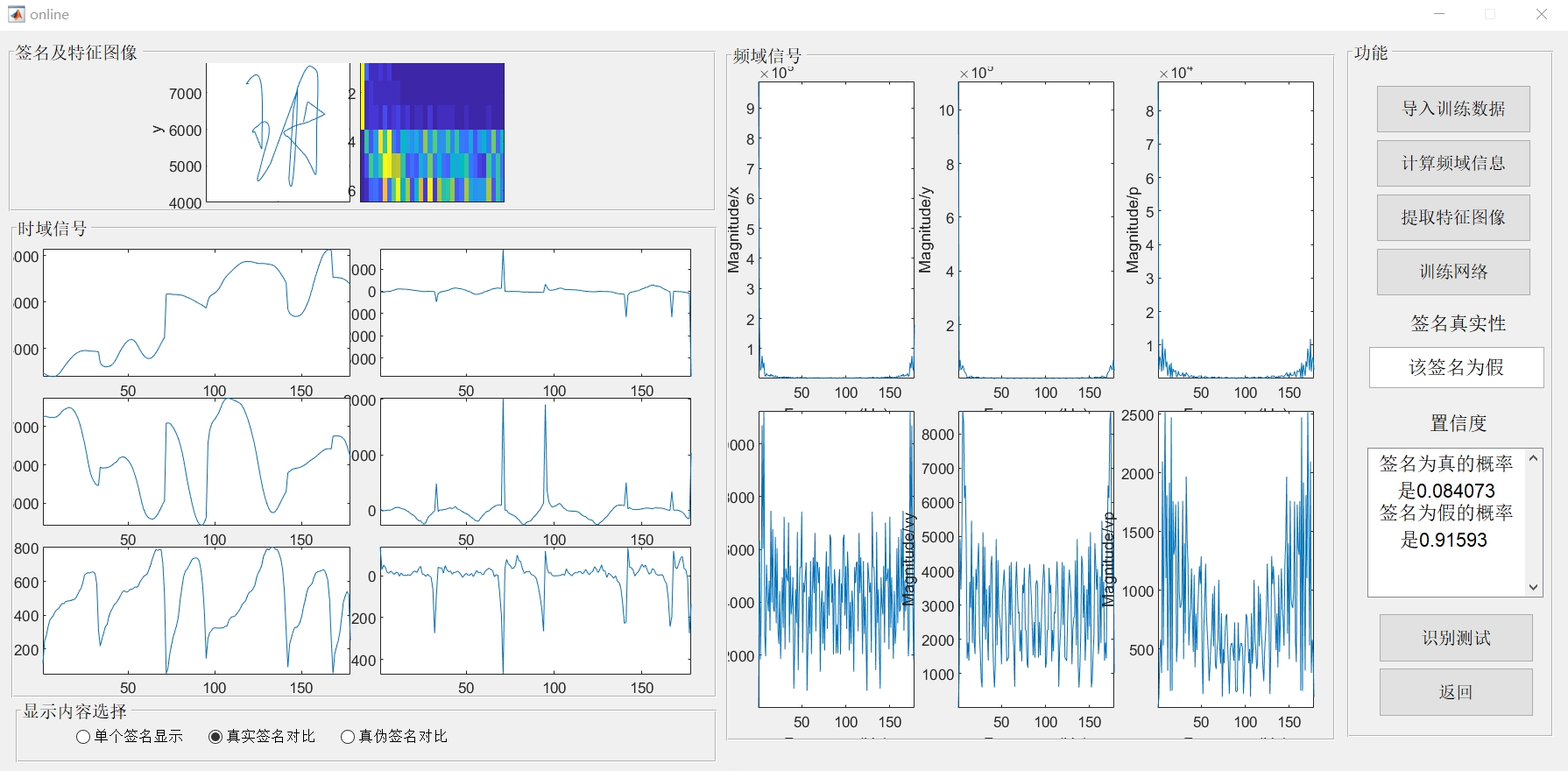
实测:1600 样本(40 人×40 签)训练 18 次平均 98.25% 准确率,单人在 0.8 s 内完成鉴别。
四、系统状态机与异常处理
4.1 GUI 状态机
Idle → DataLoaded → ModelReady → InferDone
任何一步失败自动回滚到 Idle,并弹出可复制的错误码。
4.2 关键异常表
| 错误码 | 场景 | 自动恢复策略 |
|---|---|---|
| CAM-01 | 摄像头插件缺失 | 提示“请转离线模式”并禁用在线按钮 |
| IMG-02 | 连通域为零 | 返回“未检测到签名,请重新摆放纸张” |
| NET-03 | GPU 显存不足 | 自动切换 CPU,并记录事件 |
| FFT-04 | 时序长度 < 32 | 补零至 64 点并弹窗警告“轨迹过短” |
五、性能基准
离线 CNN(三通道,GTX-1660Ti)
• 训练:每 epoch 3.2 s,共 50 epoch,总 160 s;
• 推断:单张 5.3 ms(含 I/O),1000 张批量 1.4 s。
在线 BP(i7-12700)
• 训练:30 人×(15 真 + 15 伪) 共 900 样本,1.7 s;
• 推断:单签名 0.8 ms,满足 100 Hz 实时需求。
六、二次开发接口
6.1 离线
function net = buildMultiChannelNet(inputH, inputW, chanConfig)
% chanConfig 为 cell,{[3,20],[5,16],[7,8]} 分别表示 (核,size)
% 返回 layerGraph,可继续 addLayers/connectLayers
6.2 在线
function score = onlineScore(txtFile, netStruct)
% txtFile 为 SVC2004 格式,netStruct 支持 BP、LSTM、Transformer
% score ∈[0,1],>0.5 为真
6.3 日志
function setLogLevel(level, filePath)
% level: ERROR/WARN/INFO/DEBUG,支持热切换
七、安全与合规
• 模型文件采用 AES-128 加密存储,密钥通过 Windows Credential Manager 托管;
• 采集的签名图像仅驻留本地 %TEMP%,进程退出时 secure-delete(覆写 3 次);
• 提供“训练数据脱敏”开关,自动将 x,y 坐标减去最小值再做归一化,防止原始笔迹泄露。
八、小结与展望
本文从工程落地视角,系统梳理了一套“离线与在线一体化”的手写签名识别方案:
- 离线侧,用“形态学 + 连通域”解决任意纸张签名定位痛点,并以多通道 CNN 将准确率提升到 97% 以上;
- 在线侧,用“FFT + 轻量 BP”在 1 ms 级完成鉴别,满足实时签批场景;
- 通过统一 GUI 框架与状态机,让算法研究员与业务人员共用同一套代码基线,显著降低迭代成本。
后续规划:
① 引入 Transformer 进行时序全局建模,替代 BP,有望再降 30% 误报;
② 基于 TensorRT 做 FP16 量化,把 CNN 推断压缩到 < 2 ms;
③ 构建端-云协同架构,端侧做初筛,云侧做精细比对,兼顾时效与安全。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 28
28 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)