全直驱赋能灵巧操作,以灵巧之手,启具身之境
在人形机器人向通用具身智能跨越的关键赛道上,灵巧手作为机器人与物理世界交互的“最后一公里”,其操作精度、感知灵敏度与动作灵活度直接定义了通用具身智能的落地边界与应用高度。北京星动纪元科技有限公司研发的星动XHAND1五指机器人灵巧手,凭借全直驱核心技术突破了行业长期存在的瓶颈,深度融合高集成度硬件架构与先进AI算法。该产品不仅精准复刻了人手的灵活度与操作精度,更推动人形机器人实现从“能走能跳”向“

在人形机器人向通用具身智能跨越的关键赛道上,灵巧手作为机器人与物理世界交互的“最后一公里”,其操作精度、感知灵敏度与动作灵活度直接定义了通用具身智能的落地边界与应用高度。北京星动纪元科技有限公司研发的星动XHAND1五指机器人灵巧手,凭借全直驱核心技术突破了行业长期存在的瓶颈,深度融合高集成度硬件架构与先进AI算法。该产品不仅精准复刻了人手的灵活度与操作精度,更推动人形机器人实现从“能走能跳”向“会做会干活”的关键性跨越,已成为全球具身智能领域具有标杆意义的核心零部件产品。
当前灵巧手的应用需求已广泛渗透至科研攻关、工业制造、服务场景等多个领域。然而,行业发展仍受多重技术瓶颈制约:液压与气动驱动方案受限于小型化设计及气源传输难题,难以满足人形机器人轻量化、一体化的核心需求;多数商业化灵巧手为控制成本大幅简化自由度,普遍仅具备6个自由度,无法完成复杂精细的操作任务;触觉传感器研发技术门槛较高,导致多数灵巧手感知能力薄弱,难以应对易碎、异形及高精度要求的物体操控场景;核心零部件集成度偏低,直接影响产品的稳定性、可靠性与使用寿命。

星动XHAND1作为行业首创关节全直驱方案的仿人五指灵巧手,以“好用、耐用、精准、可反哺具身大脑研究”为核心特质,其规格参数、应用场景与优势特点均处于行业领先水平,全方位适配科研、工业、服务等多领域需求,以下进行系统拆解。
一、规格参数:
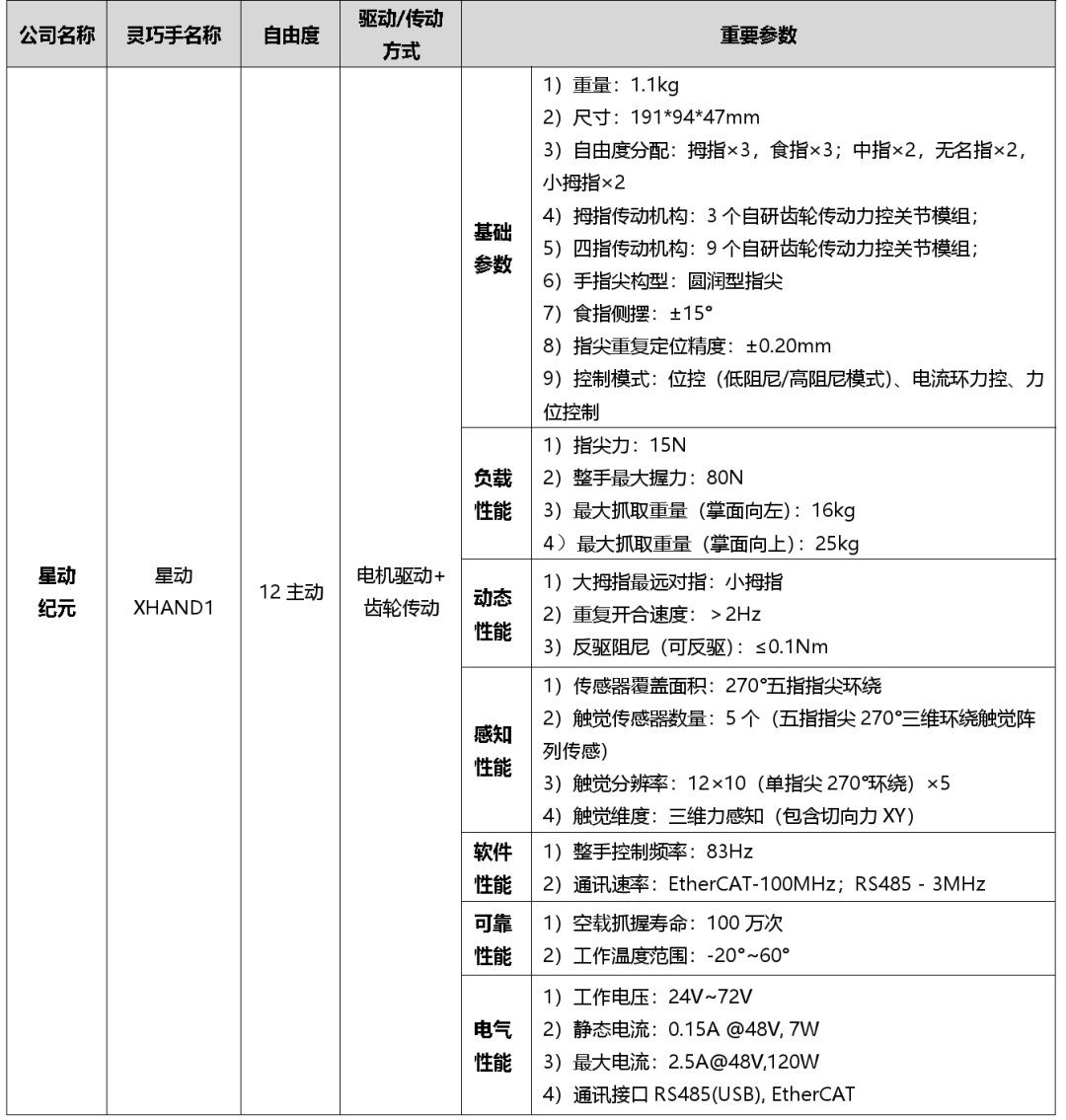
星动XHAND1以类人手设计为基础,兼顾轻量化与高性能,核心规格参数精准匹配多场景使用需求,具体如下:
-
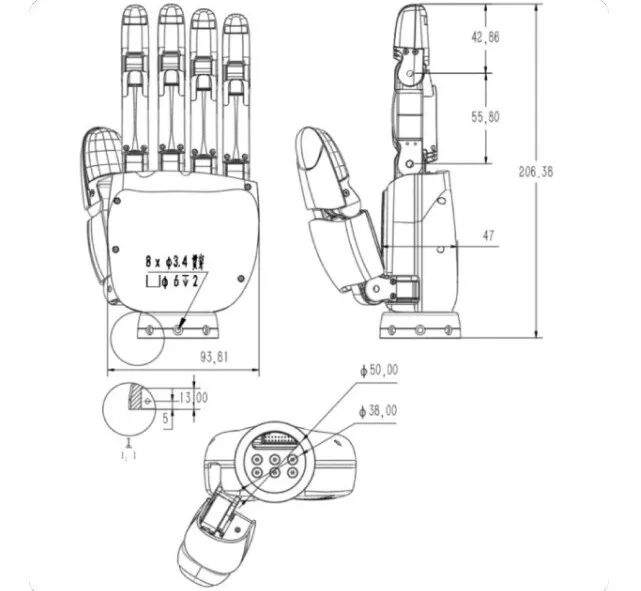
硬件尺寸:191mm×94mm×47mm,与人手大小高度契合,可无缝适配人类工具与操作空间;
-
自由度配置:配备12个全主动、全直驱自由度,其中大拇指与食指各3个自由度,其余三根手指各2个自由度,食指额外增设±15°侧摆自由度,12个独立自由度完全解耦,可灵活完成各类精细操作;
-
动力性能:单指最大负载可达5Kg以上,四指协同最大负载超20Kg,整手最大握力达80N,可轻松举起25Kg重物,响应速度快至每秒10次精准点击,媲美电竞选手手速;
-
感知参数:五指指尖均配备270°三维环绕式高分辨率触觉阵列传感器,每个指尖可采集120-300个均匀分布的三维力信息(分辨率>100点),最小感知分辨率仅0.05N,每个传感器同时集成20个温度感知阵列,可实时捕捉力与温度变化;
-
可靠性指标:反驱阻尼≤0.1Nm,各关节可灵活反驱,空载抓握寿命达100万次,工作温度覆盖-20℃~60℃,可适应复杂工业与科研环境;
-
兼容性参数:全面兼容ROS2与ROS1系统,支持Ubuntu操作系统,适配x86与ARM两种架构,具备EtherCAT、RS485等多种通讯接口,可与xARM、Realman、UR等主流机械臂灵活适配,同时兼容Apple Vision Pro、Manus手套、Pico等多款遥操作设备。
二、多元应用场景
凭借强劲的硬件性能与AI协同能力,星动XHAND1已在多个领域实现规模化应用落地,成为全球科研机构与企业的首选末端执行器。其核心应用场景主要分为四大类:

-
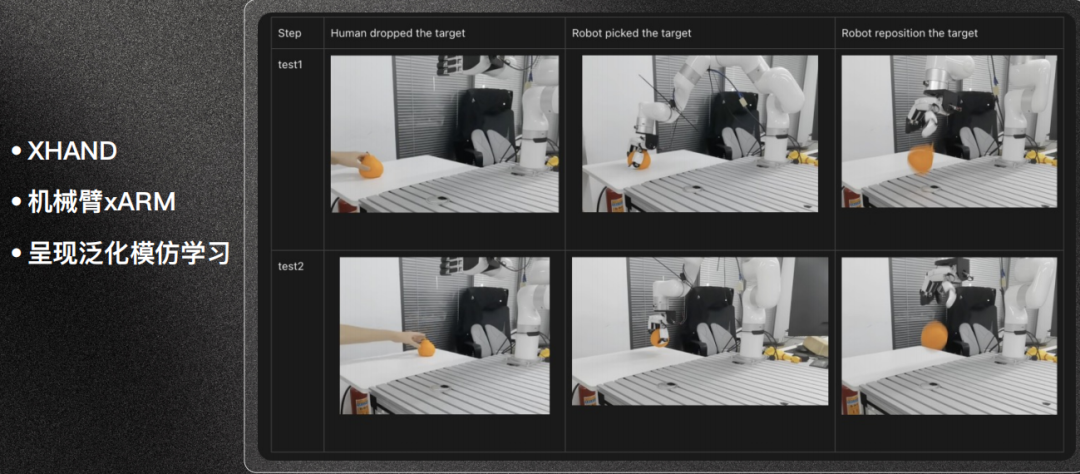
科研攻关:适配模仿学习、强化学习等前沿算法研究,其“手把手示教”模式可同步采集多模态数据,数据采集速度较传统遥操提升2倍,助力科研人员突破具身智能算法瓶颈,9项生活化任务平均成功率达74.4%,在螺丝拧紧等任务中成功率可达92%;
-
工业制造:适配工业精细装配、精密拧螺丝、工具操控等任务,可精准操控螺钉、取液枪等精细工具,能应对易碎、异形、高精度要求的物体操控需求。
-
物流服务:可完成包裹分拣、扫码识别、轻薄快递面单捏取、标签夹取等操作,配合人形机器人实现物流全流程灵巧作业,已与顺丰等企业达成深度合作,适配仓储物流场景需求;
-
民生服务:可完成按摩、喂饭、拧瓶盖、挤牙膏等生活化操作,能轻柔抓取鸡蛋、豆腐等易碎物品,甚至可完成撸猫等精细互动,同时可适配零售导购、展会讲解等服务场景,未来将逐步拓展至医疗辅助等领域。

三、核心优势特点
星动XHAND1的核心优势源于全栈自研的技术壁垒,融合硬件创新与软件协同,打破行业“成本、性能、可靠性”不可能三角,具体特点如下:
-
全直驱技术领先:采用国内首创的关节全直驱方案,替代传统绳驱、推杆或液压气动驱动,无传动损耗,动力响应更快,同时具备高反驱透明度与低阻尼特性,可有效规避意外冲击损坏,支持电流环直接力控,为AI算法研发提供“真正的操作自由”,性能远超同尺寸同类产品;
-
感知能力精准全面:搭载高分辨率触觉与温度双感知阵列,可精准识别物体形状、硬度、纹理及温度,实现与人手同源的交互体验,既能完成高强度负重操作,也能胜任精细化操控任务,环境适应性极强;
-
AI协同能力突出:与星动纪元自研端到端原生机器人大模型ERA-42深度适配,无需预编程,通过自然语言或语音指令即可完成1000余种复杂灵巧操作,不到2小时即可通过少量数据学会新任务,具备强大的泛化与自适应能力,可快速响应外部环境干扰;
-
兼容性与实用性强:支持多系统、多架构、多机械臂适配,二次开发友好,遥操作全链条解决方案完善,同时具备超长使用寿命与宽温度工作范围,可适配科研、工业、民生等多场景长期稳定运行;
-
全球市场认可度高:创办仅两年已实现海外业务占比50%,全球市值TOP10科技巨头中9家为其客户,不仅成为科研机构的“实验标配”,更成为全球人形机器人厂商突破灵巧操作能力的核心支撑,彰显中国科创产品的全球竞争力。

星动XHAND1的核心竞争力,源于其行业领先的全直驱技术与高集成度结构设计。与市面上主流的欠驱方案不同,其12个全主动、全直驱自由度完全复刻人手灵活度,食指额外增设的±15°侧摆自由度的设计,可灵活完成旋拧、拿捏等精细动作;拇指与小拇指的对指优化设计,进一步提升了抓握的稳定性与适配性,赋予灵巧手高效执行各类复杂任务的能力。
为实现轻量化与高性能的最优平衡,星动XHAND1采用全自研一体化关节模组,高度集成高功率密度空心杯电机、低阻尼小间隙减速器、高功率密度驱动器与高精度编码器,通过深耕底层电机的磁路拓扑优化与结构创新设计,在类人手尺寸范围内,实现了远超同级别产品的强劲动力输出。其单指最大负载可达5Kg以上,四指协同最大负载超20Kg,整手最大握力达80N,可轻松举起25Kg重物,性能表现大幅超越同尺寸绳驱与推杆驱动方案。
此外,全直驱设计带来的高反驱透明度与低阻尼特性(反驱阻尼≤0.1Nm),不仅实现每个关节均可灵活反驱,有效规避意外冲击对设备造成的损坏,还支持直接采用电流环进行力控调节,为科研研究者提供了极高的深度可配置性,也为模仿学习、强化学习等前沿AI算法的研发提供了“真正的操作自由”。
星动XHAND1的硬核硬件性能,在与星动纪元自研端到端原生机器人大模型ERA-42深度协同后,实现了性能价值的进一步释放。ERA-42作为国内首个真正意义上的端到端原生机器人大模型,可融合视觉、语言、触觉和身体姿态等全模态信息,具备统一模型泛化多种任务、端到端直接执行与规模化高效学习的核心优势,与星动XHAND1深度适配后,已成功掌握1000多种复杂灵巧操作任务,可灵活使用各类工具完成作业。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 28
28 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)