基于GA与Clothoid曲线平滑的多载具路径规划实战
基于遗传算法GA和Clothoid曲线平滑的路径规划代码,适合无人机,无人船,无人驾驶汽车,移动机器人。在真实环境下,读取高德地图,并且规划路径,可自行选择新地图和设定起点和终点。请预先装好navigation toolbox,安装教学在main函数中。路径优化,路径平滑跑出来的结果如下图所示:在智能载具领域,路径规划一直是核心问题,无论是无人机翱翔天际、无人船畅游江河,还是无人驾驶汽车行驶在道路
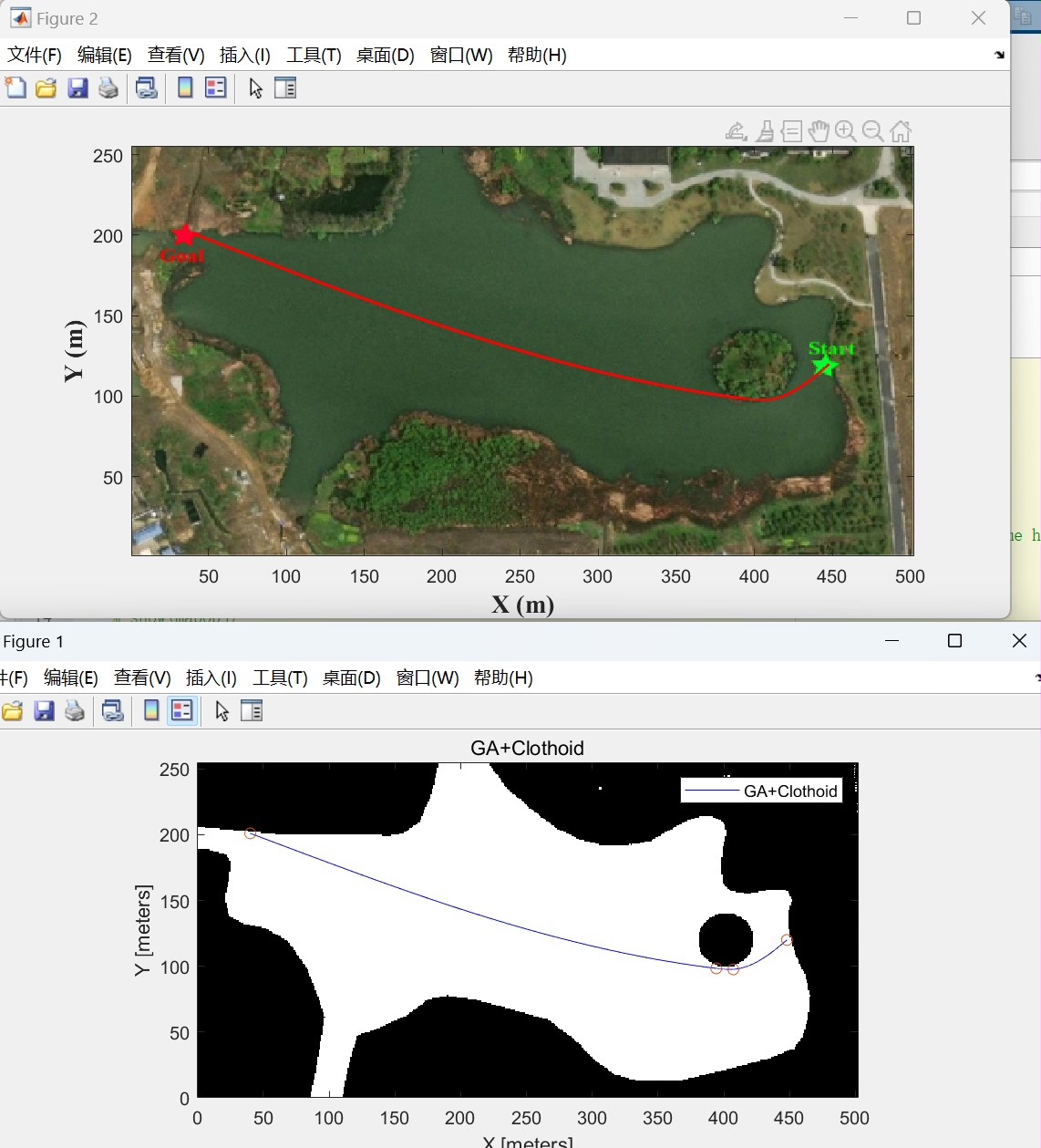
基于遗传算法GA和Clothoid曲线平滑的路径规划代码,适合无人机,无人船,无人驾驶汽车,移动机器人。 在真实环境下,读取高德地图,并且规划路径,可自行选择新地图和设定起点和终点。 请预先装好navigation toolbox,安装教学在main函数中。 路径优化,路径平滑 跑出来的结果如下图所示:
在智能载具领域,路径规划一直是核心问题,无论是无人机翱翔天际、无人船畅游江河,还是无人驾驶汽车行驶在道路上,又或是移动机器人穿梭于室内外环境,都需要高效精准的路径规划。今天咱们就聊聊基于遗传算法(GA)和Clothoid曲线平滑的路径规划,还会结合高德地图,在真实环境中实现这一规划。
准备工作 - 安装navigation toolbox
在开始编写路径规划代码之前,得先把 navigation toolbox 准备好。下面就是安装教学(放在 main 函数中只是为了方便讲解,实际可按需调整位置):
function main()
% 检查是否已安装navigation toolbox
try
ver('Navigation Toolbox');
disp('Navigation Toolbox 已安装');
catch
% 如果未安装,前往MATLAB官方下载安装
web('https://www.mathworks.com/matlabcentral/fileexchange/70774-navigation-toolbox', '-browser');
disp('请按照提示前往MATLAB官方下载安装Navigation Toolbox');
end
end上面这段代码简单地检查 navigation toolbox 是否已经安装在MATLAB环境中。如果已经安装,就会在命令行打印“Navigation Toolbox 已安装”;要是没安装,就会打开MATLAB官方的下载链接,方便你去下载安装。
基于遗传算法的路径规划
遗传算法模拟生物进化过程,通过选择、交叉和变异等操作,逐步寻优。下面这段伪代码展示了其基本框架:
# 初始化种群
population = initialize_population(population_size, problem_size)
for generation in range(max_generations):
# 计算适应度
fitness_values = calculate_fitness(population, problem)
# 选择
new_population = selection(population, fitness_values)
# 交叉
new_population = crossover(new_population)
# 变异
new_population = mutation(new_population)
population = new_population
best_solution = get_best_solution(population, fitness_values)这里,initializepopulation 函数生成初始的个体集合,每个个体代表一条潜在的路径。calculatefitness 函数评估每个个体与问题目标的契合程度,越契合的个体,适应度越高。selection 操作依据适应度选择较优个体进入下一代,类似自然界的适者生存。crossover 模拟生物交配,交换两个个体的部分基因,生成新个体。mutation 以一定概率随机改变个体的某些基因,防止算法过早收敛。
结合高德地图读取与路径规划
在真实环境下使用高德地图来规划路径,需要调用高德地图的API。以Python为例,借助 requests 库来获取地图数据:
import requests
# 高德地图API密钥
key = 'your_api_key'
def get_map_data(start, end):
url = f'https://restapi.amap.com/v3/direction/driving?origin={start}&destination={end}&key={key}'
response = requests.get(url)
if response.status_code == 200:
return response.json()
else:
print('获取地图数据失败')
return None上述代码定义了 getmapdata 函数,通过传入起点 start 和终点 end,向高德地图API发送请求获取驾车路径规划数据。如果请求成功(状态码为200),就返回解析后的JSON数据,否则打印错误信息。
Clothoid曲线平滑路径
路径规划出来后,往往需要平滑处理,让路径更符合实际运动需求。Clothoid曲线在这方面很有用。下面是一段简单的MATLAB代码实现对路径点的平滑:
% 假设path_points是规划好的路径点
path_points = [x_coords; y_coords];
num_points = size(path_points, 2);
% Clothoid曲线参数化
t = linspace(0, 1, num_points);
x_smooth = spline(t, path_points(1, :), t);
y_smooth = spline(t, path_points(2, :), t);这段代码先假设 pathpoints 是规划好的路径点,然后通过 linspace 函数生成参数 t,再利用 spline 函数对路径点的横坐标和纵坐标分别进行样条插值,得到平滑后的路径坐标 xsmooth 和 y_smooth。
基于遗传算法GA和Clothoid曲线平滑的路径规划代码,适合无人机,无人船,无人驾驶汽车,移动机器人。 在真实环境下,读取高德地图,并且规划路径,可自行选择新地图和设定起点和终点。 请预先装好navigation toolbox,安装教学在main函数中。 路径优化,路径平滑 跑出来的结果如下图所示:
通过以上步骤,我们就实现了基于遗传算法和Clothoid曲线平滑的路径规划,并结合高德地图在真实环境下进行路径规划,为无人机、无人船、无人驾驶汽车和移动机器人等智能载具提供可行的路径规划方案。希望大家在实践中能不断优化,让这些智能载具的“出行”更加顺畅。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 21
21 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)