①Agent Swarm-Kimi K2.5 技术报告解读
Agent Swarm是Kimi推出的并行化AI功能,通过主Agent动态创建并管理多个子Agent协同完成任务。采用PARL训练方法,初期鼓励并行执行,后期侧重任务质量。技术报告显示其性能优于Claude Opus 4.5,但需199元/月订阅。关键创新包括并行执行机制和Critical Steps延迟指标,解决了传统串行Agent速度慢、智能化不足的问题。实际效果尚待验证。
Agent Swarm
在整个技术报告中,让我最感兴趣的部分就是 Agent Swarm,这个功能需要到官网购买199元/月的套餐才能使用,具体效果我还没测过。
现有痛点:
- 速度慢:在传统的任务中,如 DeepResearch、数学建模等困难复杂任务中,Agent虽然可以使用各种工具+长路径规划来完成任务,但是一次就需要5-20分钟,这样的串行执行是非常慢的。
- 不够智能:现有的 Multi-Agent 系统中,大多是人为设定的不同 Role,如软件开发 SOP 中的“产品”、“开发”、“测试”…等。本质上是基于 Prompt 的 workflow 设计,并不是在模型训练中习得的能力。
Agent Swarm 的方案:
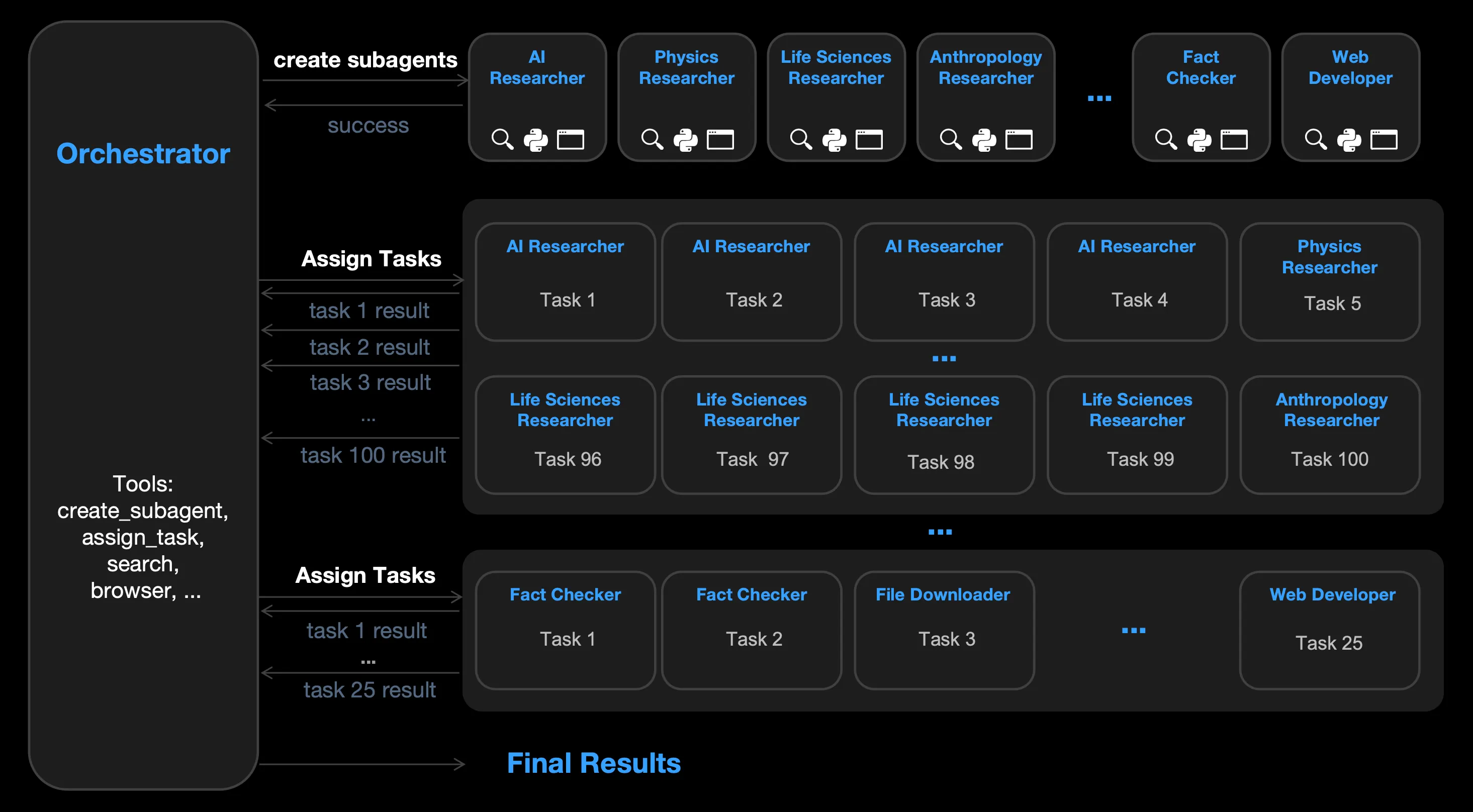
在训练中,使用 Agentic RL 的方式,让模型主动并行地发起几十上百个子 Agent 去完相应的任务,注意这里是并行执行,而不是串行地去执行一个 Todo List。其中每个子 Agent 的 Role 和分配的任务均由主 Agent 来分配。让模型学习到如何使用并行化的方式,更有效地解决问题和节省时间。训练的过程中,策略模型作为主模型,负责分配启动子 Agent 并分配任务,以及进行整合等(MapReduce),子 Agent 参数冻结。这种训练方式被 Kimi 称为 PARL(Parallel-Agent Reinforcement Learning)。

由于独立运行的子智能体提供的反馈存在延迟、稀疏和非平稳性,训练一个可靠的并行编排器极具挑战性。常见的故障模式是串行崩溃,即编排器尽管具备并行能力,却默认执行单智能体任务。为了解决这个问题,PARL 采用了分阶段奖励塑造策略,在训练初期鼓励并行性,并逐步将重点转移到任务成功上。
Rt=λaux(e)⋅rparallel+(1−λaux(e))⋅(I[success]⋅Q(τ)) R_t = \lambda_{aux}(e)\cdot r_{parallel} + \left(1-\lambda_{aux}(e)\right)\cdot \left(\mathbb{I}[\text{success}]\cdot Q(\tau)\right) Rt=λaux(e)⋅rparallel+(1−λaux(e))⋅(I[success]⋅Q(τ))
其中rparallelr_{parallel}rparallel可以理解为格式奖励,用于鼓励子 Agent 的实例化与并发执行;I[success]⋅Q(τ)\mathbb{I}[\text{success}]\cdot Q(\tau)I[success]⋅Q(τ)是结果质量分。
在训练的过程中 λaux(e)\lambda_{aux}(e)λaux(e)从初始的0.1退火至0.0。
CriticalSteps=∑t=1T(Smain(t)+maxiSsub,i(t)) \text{CriticalSteps}=\sum_{t=1}^{T}\left(S_{\text{main}}^{(t)}+\max_i S_{\text{sub},i}^{(t)}\right) CriticalSteps=t=1∑T(Smain(t)+imaxSsub,i(t))
Critical Steps,通过计算时间,衡量 Agent 的延迟。其中,Smain(t)S_{main}^{(t)}Smain(t)表示编排开销,而maxiSsub,i(t)\max_i S_{\text{sub},i}^{(t)}maxiSsub,i(t)则反映了在每个阶段中最慢的子智能体。在该指标下,增加子任务数量只有在缩短关键路径时才会带来性能提升。这只是给出了一个用于衡量 Agent Swarm 延迟的指标,并没有参与到 Reward/Loss 的计算中。

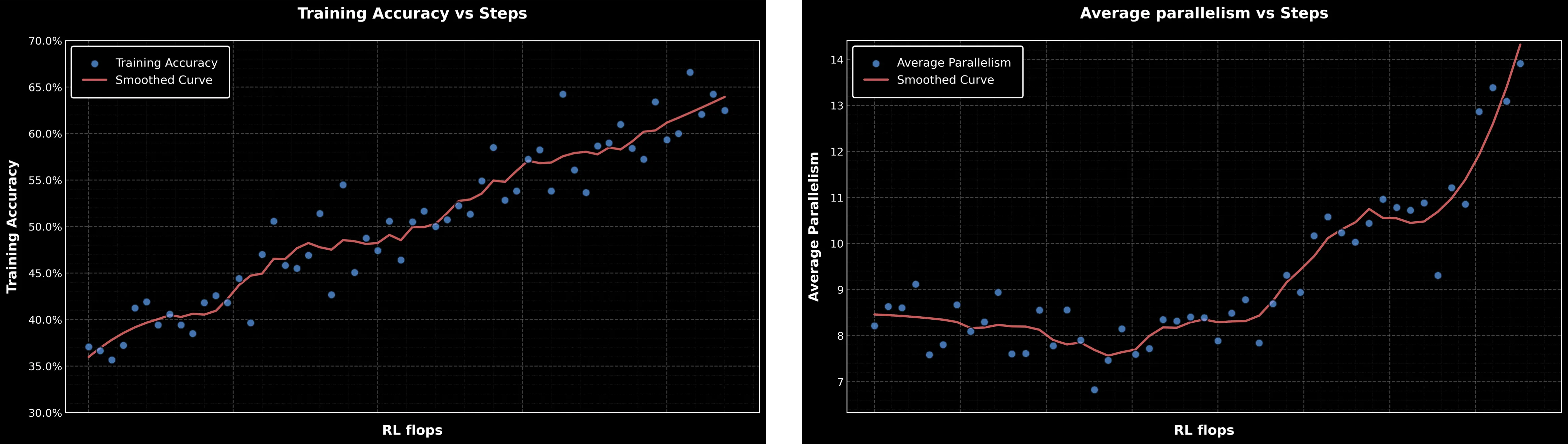
可见,随着训练step的增加,不仅ACC在稳步提升,Agent Swarm 的并行性也在显著增加。
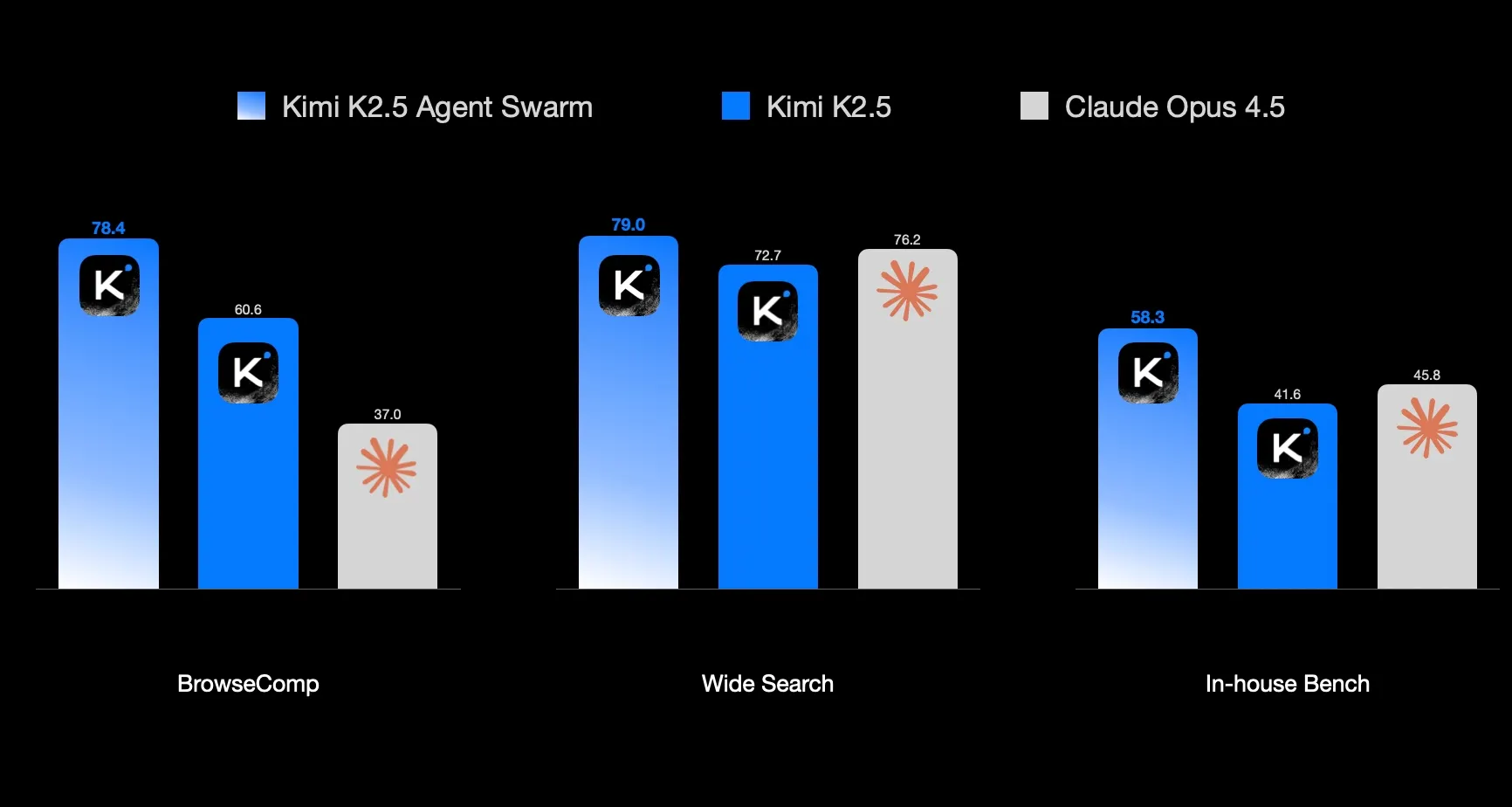
报告显示,其性能超过了 Claude Opus 4.5,但是会员会员买不起…先观望一下…

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 16
16 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)