新手入门|具身智能五步搭建 + 核心组件解析
本文系统介绍了构建具身智能系统的五个关键步骤:构建物理实体、运动控制、环境感知、认知决策和自主学习。重点分析了四种常用电机(舵机、步进电机、无刷电机、编码器)的工作原理、优缺点及适用场景,指出编码器是实现高精度控制的核心组件。文章还阐述了仿真平台在机器人开发中的重要性,能够降低研发成本、提高成功率。通过这五个步骤的递进实现,机器人可以从机械装置进化为具备自主学习和适应能力的智能体。
我把从零开始构建一个完整的具身智能系统分为五步,如下表。
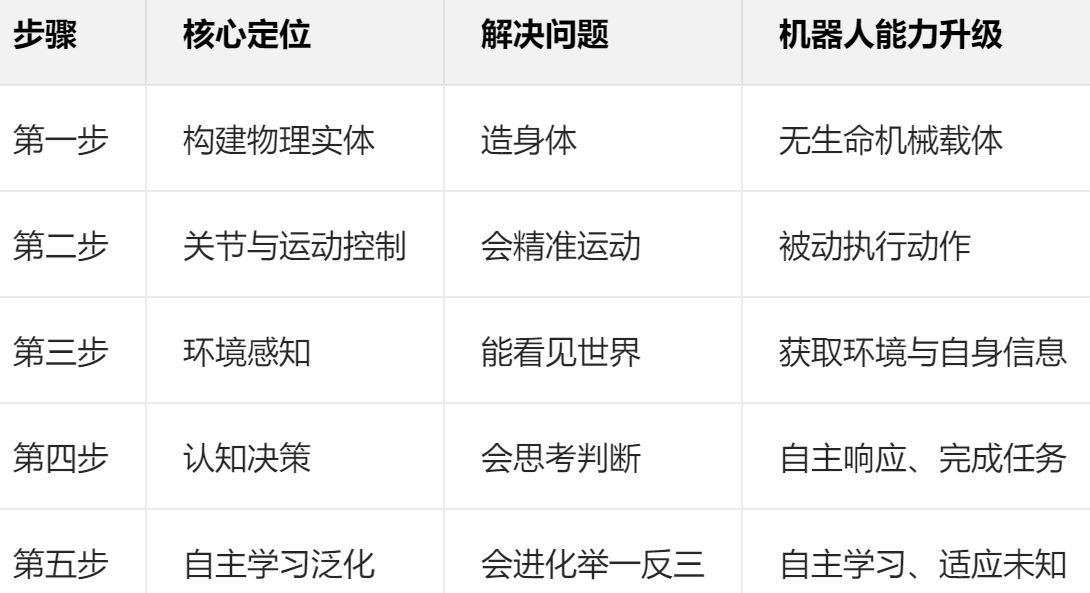
我们构建一套完整的具身智能系统,可以遵循从物理到智能、从执行到认知、从固定到自主的递进规律,按照构建实体、运动控制、环境感知、认知决策、自主学习五步逐级推进,层层搭建起智能体与物理世界交互、理解、决策并持续进化的完整闭环。
第一步先构建机器人的物理实体,完成机械结构装配、硬件电路连接与动力系统搭建,打造出智能体赖以与世界交互的物理躯体,为所有后续能力奠定硬件根基。
紧接着第二步聚焦关节与运动控制,通过底层驱动开发、闭环控制算法与运动学实现,让机器人从能转动到精准运动,掌握关节、肢体与移动机构的稳定操控,将电信号转化为可靠、可重复的物理动作,赋予智能体基础的执行与 “肢体反射” 能力。
第三步为机器人搭建多模态感知系统,通过视觉、距离、姿态与本体传感器,采集外部环境与自身状态信息,将物理世界转化为可计算的数字信号,让机器人真正 “看见、感知、理解” 周遭环境与自身姿态。
第四步则搭建认知决策模块,以感知信息为输入、运动指令为输出,通过规则推理、行为规划乃至大模型语义理解,让机器人根据场景变化自主判断、规划动作、响应任务,实现从感知到行动的智能映射,拥有独立思考与实时决策的能力。
最后一步是实现自主学习与泛化,让机器人脱离预设的人工规则,通过模仿、试错、自监督与强化学习,在与环境的交互中自主优化行为策略,并将已习得的能力迁移到陌生场景与新任务中,做到举一反三、自适应迭代。
至此,经过这五个步骤后,机器人能够从被动执行的机械装置,升级为能够自主探索、持续学习、终身进化的完整具身智能体,完成从 “机器” 到 “智能体” 的最终蜕变啦!
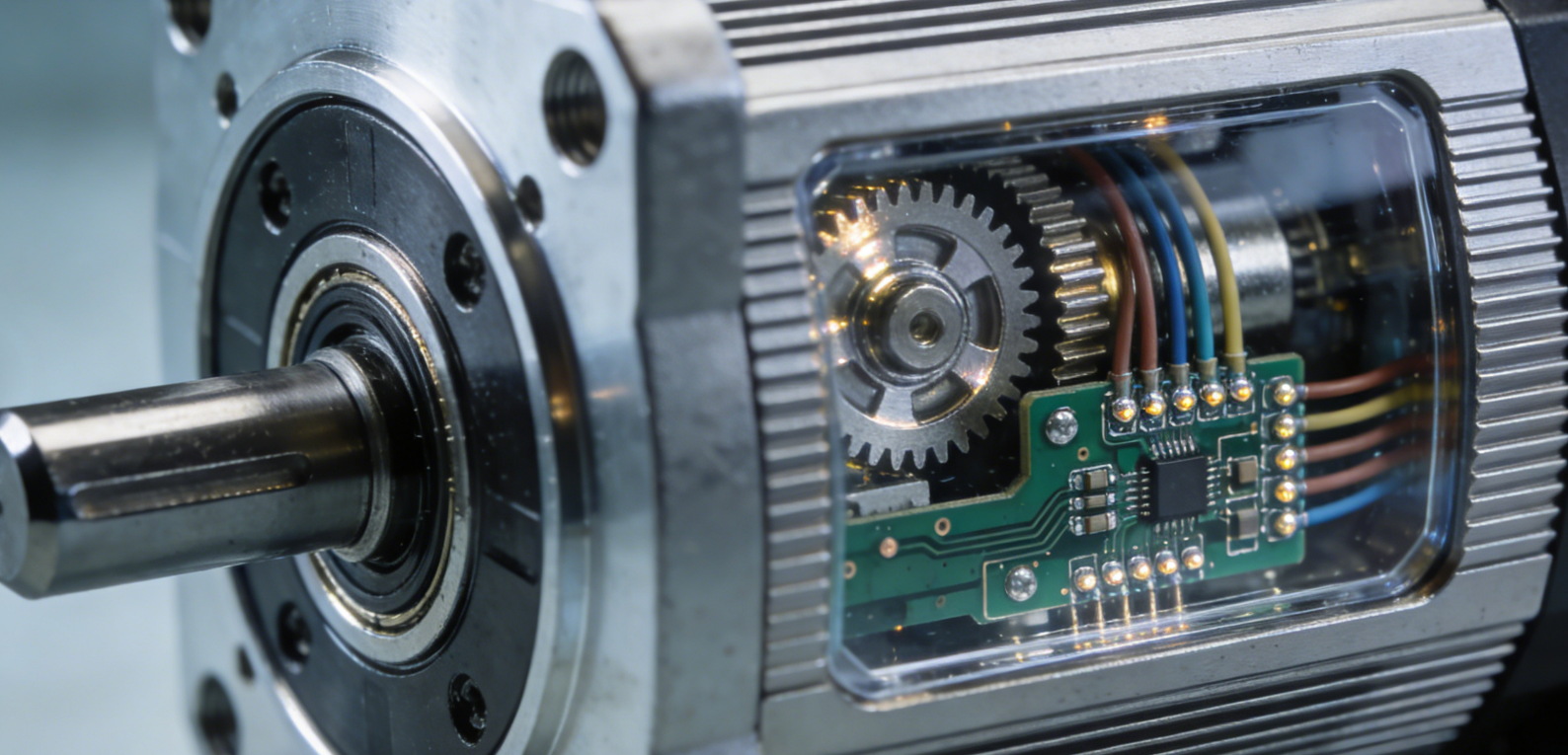
我们要从零搭建一个具身智能就要了解它的执行单元是什么?
我们需要去搞懂驱动技术,如何去控制电机,如何让代码变成物理世界里面精准的动作,这也是具身智能走进现实的第一步。首先电机是什么,电机的原理是什么?电机是将电能转化为旋转机械能的装置。它的基本原理是通电导线产生磁场,利用磁场之间同极相斥、异极相吸的作用力,推动内部线圈持续转动,从而输出动力。

但是现在机器人也不用普通的直流电机,因为普通直流电机只能傻转,没办法精准控制角度,而且它的物理接触会造成摩擦和磨损,所以机器人现在使用舵机来精准执行命令。舵机是可精确控制旋转角度的执行器,内部由电机、减速齿轮、控制板和角度传感器组成。它根据 PWM 信号设定目标角度,通过实时角度反馈与闭环修正,实现精准定位与角度保持,是机器人关节的核心部件。舵机其实是一个小型的闭环系统,大家参考下图来对照舵机和普通直流电机吧:

同时我们也需要了解到舵机的优缺点,如下表:

我们再来看第二种常用的电机:步进电机。
步进电机是一种把电脉冲信号,转化成固定角度一步一步转动的电机。给它一个脉冲,它就转一步(一个固定小角度);给 N 个脉冲,它就转 N 步。它可以精准控制转多少角度、转多少圈、停在哪个位置,而且不开环也能定位,不需要像舵机那样内部反馈,也不像普通电机一通电就乱转。步进电机虽然精确,但是它会盲目地进行开环控制,容易丢步,3D打印机打印失败就是这个原因。
下面是舵机和步进电机的对比表、步进电机的优缺点对比表:


所以综上来说,机器人手臂、腿部等关节要求高动态且不丢步,我们选择舵机;如果是精密的仪器(3D打印机、微波炉转盘、CNC)环境稳定、步数精确的状态下,要去控制距离,我们选择步进电机。
最后我们来看第四种电机:无刷电机(BLDC)。
无刷电机,就是没有碳刷、靠电子元件控制换向、能高速旋转、寿命很长的电动机。
无刷电机的原理是电子调速器(电调)按顺序给线圈通电,产生旋转磁场,拉动永磁体转子高速转动,无物理摩擦换向,寿命长、转速高、效率高。无刷电机依靠霍尔传感器检测转子磁铁的位置,将位置信号传给电子调速器(电调),电调按照六步换相规则,依次给三相线圈(黄、绿、蓝)分配电流,产生连续旋转的磁场,驱动转子持续转动。因无电刷摩擦,实现高效率、高转速、长寿命。只要知道转子在哪里,电流就能精准推动,所以无刷电机就是闭环控制的。
下面我们来看一下无刷电机和步进电机的对比表、无刷电机的优缺点对比表:


选择什么样的电机取决于我们做什么样的工程,根据这四种电机的优劣势和应用场景,我们可以挑选出最适合我们工程的电机。
讲了以上四种电机后,我们要想实现机器人关节的高精度控制,其实最关键的组件不是电机本身,而是编码器。编码器是安装在电机轴上的位置与速度检测装置,能够实时监测并反馈电机的旋转角度、转动圈数和运行速度。它相当于电机的感知器官,让原本只能被动执行指令、无法知晓自身状态的电机,拥有了感知自身位置和转速的能力。控制器通过编码器的实时反馈,能够及时修正转动误差、弥补丢步,让电机不再盲目运转,从而实现高精度、高稳定性的位置与速度控制,是伺服系统(伺服系统是由伺服电机、驱动器与编码器构成的闭环精准运动控制系统)、精密运动控制、CNC 与机械臂实现精准定位的关键部件。
那位置编码器位置采集的原理是什么呢?
位置编码器的核心原理是将机械旋转的角位移转换成电信号,以此检测并输出位置信息。它内部装有随电机轴同步转动的码盘,码盘上均匀分布着透光狭缝或磁极,当电机带动码盘旋转时,通过光电感应或磁电感应的方式,把连续的位置变化转化为一系列断续的脉冲电信号。控制器通过统计脉冲的数量、频率和相位,就能精确计算出电机转过的角度、当前位置和转动速度,从而实现对位置的实时采集与反馈,是伺服系统实现高精度闭环控制的关键部件。
对于创建一个机器人来说,我们一般会从仿真平台开始。我先回答一下为什么我们要先从一个仿真平台搭建,而不是直接买硬件跑代码呢?
在制造实体机器人前使用仿真平台,是因为仿真平台能够构建与真实环境高度一致的虚拟机器人模型,在零硬件损耗、零安全风险的前提下,完成机器人结构设计、电机与舵机选型、传动配比验证、运动学与动力学计算、控制算法调试、步态规划、平衡优化及极限场景测试等全部研发环节。仿真可以无限次快速试错、自由修改结构与参数,提前发现并解决硬件干涉、电机过载、关节抖动、重心不稳、算法失控等问题,大幅降低研发成本与硬件损坏风险,缩短开发周期,保证控制程序与机械结构的可靠性,待虚拟模型完全稳定、算法全部跑通后,再进行实体机器人的制作与部署,可大幅提升研发成功率与机器人运行稳定性。
以下是各个仿真平台的对比表:

大家可以根据自己的项目需求来选择合适自己的仿真平台。
综上,就是本篇文章的全部内容了,之后我会尽快更新相关领域的优质内容!

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 15
15 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)