清华最新研究:让机器人大脑与身体协同优化,自进化出最优形态
清华大学王昱兴博士团队发表了一篇综述论研究,阐述了“具身协同设计”的新概念。在传统的AI机器人研发中,工程师花费巨大的精力训练一个越来越聪明的大脑,却将它禁锢在一些设计拙劣、无法改变的躯体里,这限制了机器人的任务表现,也违背了生物进化的基本规律。这篇综述深入探讨了具身协同设计(ECD)这一前沿领域,通过联合优化形态与控制,机器智能可以像生物一样在环境中进化出独特的生存智慧。未来的机器人设计不再依赖
清华大学王昱兴博士团队发表了一篇综述论研究,阐述了“具身协同设计”的新概念。

在传统的AI机器人研发中,工程师花费巨大的精力训练一个越来越聪明的大脑,却将它禁锢在一些设计拙劣、无法改变的躯体里,这限制了机器人的任务表现,也违背了生物进化的基本规律。
这篇综述深入探讨了具身协同设计(ECD)这一前沿领域,通过联合优化形态与控制,机器智能可以像生物一样在环境中进化出独特的生存智慧。
未来的机器人设计不再依赖于工程师手动绘制零件和编写代码。
让机器人的物理身体与控制大脑可以像自然界的生命一样,通过计算机模拟协同优化,自动生长出最适合完成特定任务的形态与能力。
生物进化的数字回响与设计重构
大自然从不单独进化大脑或身体。
猎豹的脊椎结构与其奔跑的神经控制回路是同步演进的,这种名为“脑体协同进化”的现象造就了地球上无数精妙的生命形式。
具身协同设计(Embodied Co-Design, ECD)正是受到这一生物学现象的启发,试图在机器世界中重现这一奇迹。
传统机器人设计遵循串行模式。
机械工程师先造出机器人,控制算法工程师再接手调试。
这种流程导致形态往往为了机械最优而设计,忽略了控制的复杂性。
控制算法必须迁就既定的身体结构,哪怕这个结构对任务并不友好。
ECD 打破了这堵墙,将形态(Body)和控制(Brain)置于同一个优化回路中。
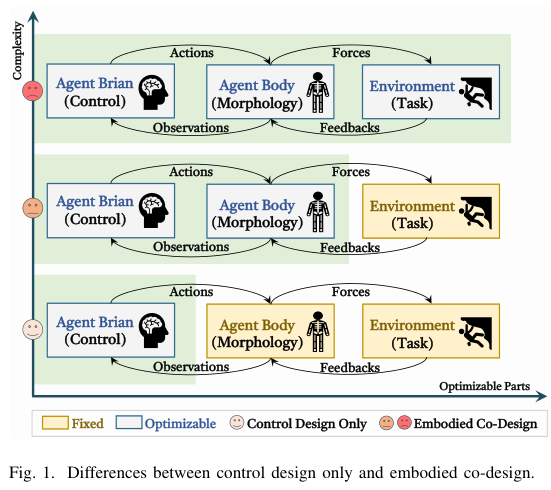
这种转变引入了一个核心概念:形态计算。
一个设计良好的身体可以分担大脑的计算负荷。
被动动力学行走的机器人完全依靠腿部结构无需任何电机驱动就能走下坡道,这就是形态本身在进行“计算”。
ECD 的目标就是在形态计算与算法控制之间找到最佳平衡点。
为了系统化地理解这一领域,我们需要建立一个清晰的分类学结构。
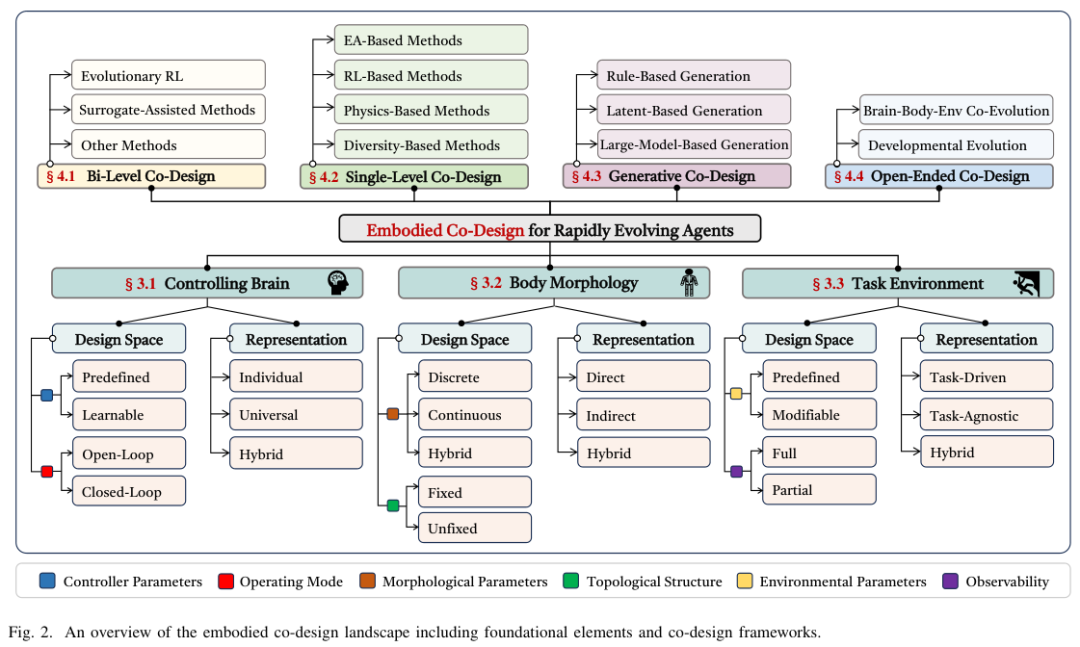
结构底层包含三个基本要素:控制大脑、身体形态和任务环境。
控制大脑负责感知信息并驱动身体。
在ECD中,控制器不仅参数是可学习的,其结构往往也是动态的。
传统方法使用固定的PID控制器,现代方法则大量采用神经网络。
对于形态固定的机器人,个体化控制器(Individual)能发挥极致性能。
对于形态多变的群体,通用控制器(Universal)则展现出强大的适应力。
图神经网络(GNN)是其中的佼佼者,它将身体看作一个图结构,无论肢体如何增减,控制策略都能顺畅迁移。
Transformer架构也被引入其中,通过注意力机制捕捉全身各部位的长程依赖关系。
身体形态定义了智能体的物理边界。
设计空间分为离散和连续两类。
离散参数决定了“有没有这条腿”,连续参数决定了“这条腿有多长”。
更重要的是形态的编码方式。
直接编码(Direct)像蓝图一样精确指定每个部件,容易产生高维度的搜索空间。间接编码(Indirect)则像生物DNA,通过生成规则(如L-systems或CPPNs)生长出复杂的形态。这种方式能产生具有模块化、对称性等自然特征的身体,大大压缩了搜索空间。
任务环境是进化的筛选器。
环境参数可以是固定的,也可以是可修改的。
在平坦地形上演化出的机器人往往结构简单,而在崎岖地形中诞生的智能体则倾向于发展出更多肢体和更稳定的结构。环境的可观测性也至关重要,部分可观测环境迫使智能体进化出带有记忆功能的控制器。
算法演进的四种核心范式
基于形态、控制和环境的交互方式,ECD 演化出了四种主要的协同设计框架:双层协同设计、单层协同设计、生成式协同设计和开放式协同设计。
这四种框架代表了人类在赋予机器进化能力时的不同思考路径。
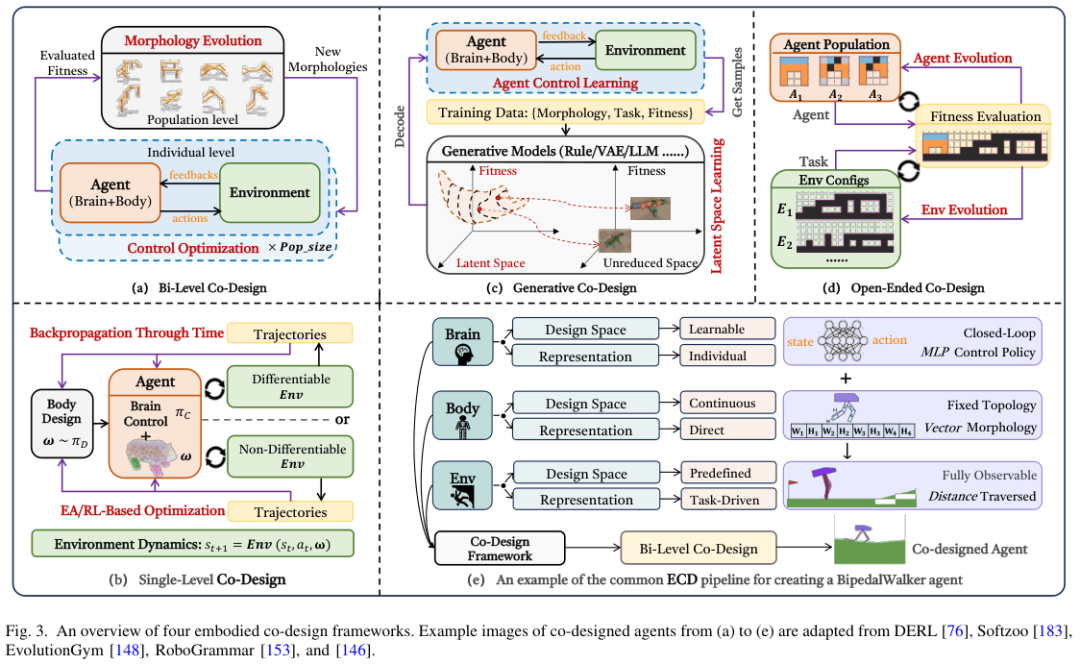
双层协同设计(Bi-Level Co-Design)是目前应用最广泛的框架。
它采用嵌套的优化结构:外层循环负责进化形态,内层循环负责为该形态训练控制器。这就好比一个造物主(外层)不断尝试新的身体设计,每造出一个,就交给教练(内层)去训练,看它能跑多快,最后根据成绩决定是否保留这个设计。
进化强化学习(Evolutionary Reinforcement Learning, ERL)是该框架的主流方法。
外层使用遗传算法(EA)探索形态空间,内层使用强化学习(RL)优化策略。这种方法的挑战在于计算成本极高。评估一个形态往往需要从头训练一个策略,耗时漫长。
为了解决效率问题,代理辅助方法(Surrogate-Assisted Methods)应运而生。
它引入一个性能预测模型,在不进行昂贵训练的情况下快速评估形态的潜力。
贝叶斯优化(BO)在这里大放异彩,它能智能地选择最有希望的形态进行验证,大幅减少无效尝试。
另一种思路是利用通用策略加速评估。
如果所有形态共享一个全能的大脑,新形态诞生时就不需要从零学习,直接继承先辈的经验。这种策略继承机制显著缩短了内层循环的耗时。
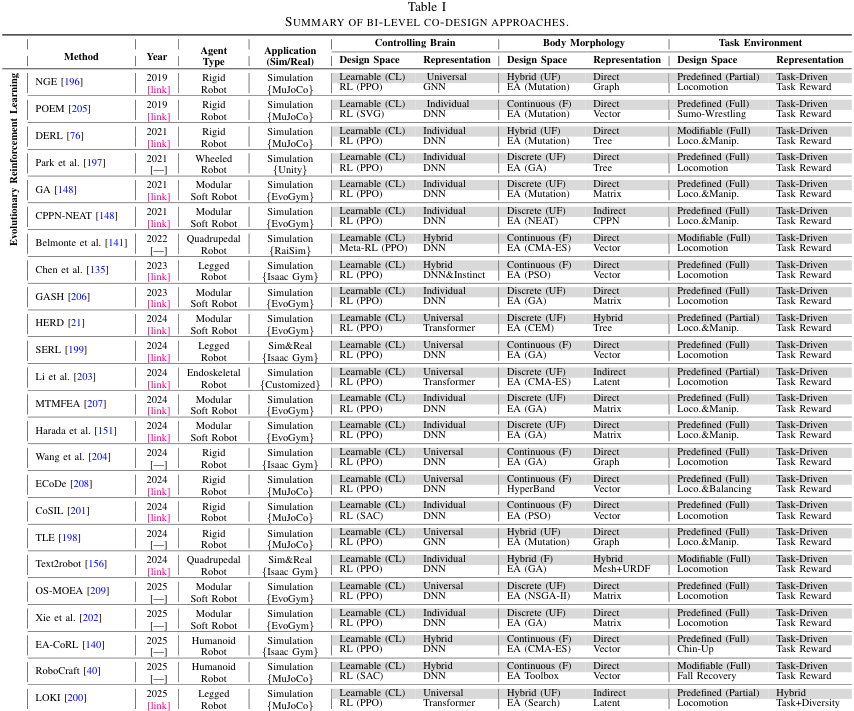
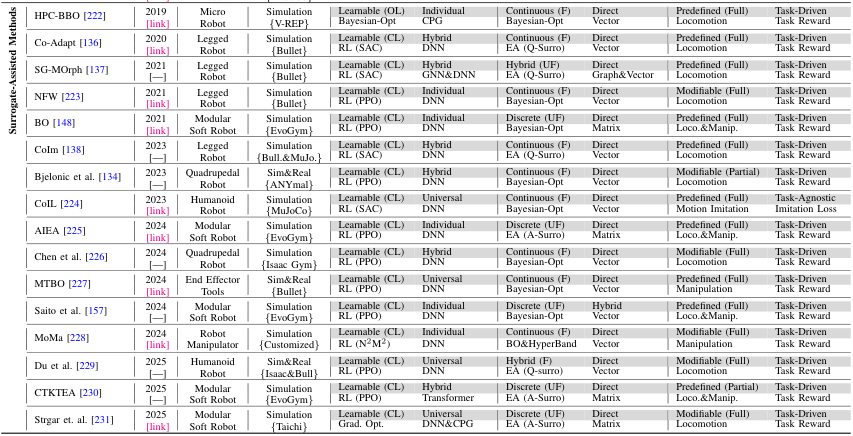
表I详细总结了近年来双层协同设计的重要研究。我们可以看到,从早期的简单刚体机器人,到如今复杂的模块化软体机器人,双层框架始终占据重要地位。
单层协同设计(Single-Level Co-Design)打破了内外循环的界限,将形态和控制视为一个统一的参数向量进行联合优化。这种方法的效率通常高于双层设计。
基于强化学习的方法尝试将形态调整也视为一种“动作”。
Transform2Act通过一个条件策略,让智能体不仅输出控制指令,还输出对自己身体的修改指令。
就像一个人在跑步的过程中,可以决定让自己的腿变长一点。这种动态调整让设计过程变得连续且高效。
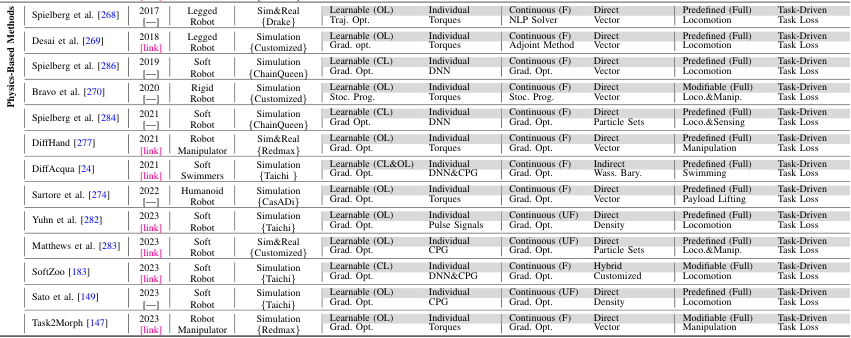
物理驱动的方法则利用了可微仿真器(Differentiable Simulator)。
如果整个物理世界都是可微的,那我们就可以直接通过链式法则,计算出“腿再长1厘米对奔跑速度有多大贡献”的梯度。
这使得梯度下降算法(如Adam)可以直接用于优化身体结构,而不仅仅是神经网络权重。
DiffHand和DiffAqua等项目展示了这种方法在软体机器人和水下机器人设计中的惊人潜力。
多样性驱动的方法(Diversity-Based Methods)则关注百花齐放。
单纯追求单一目标(如速度)往往会导致陷入局部最优,产生平庸的设计。
质量-多样性(QD)算法,如MAP-Elites,维护一个档案库,致力于寻找在形态特征空间中每个角落里的最强者。这确保了我们不仅能找到跑得快的机器人,还能找到跑得快且形态各异的机器人。
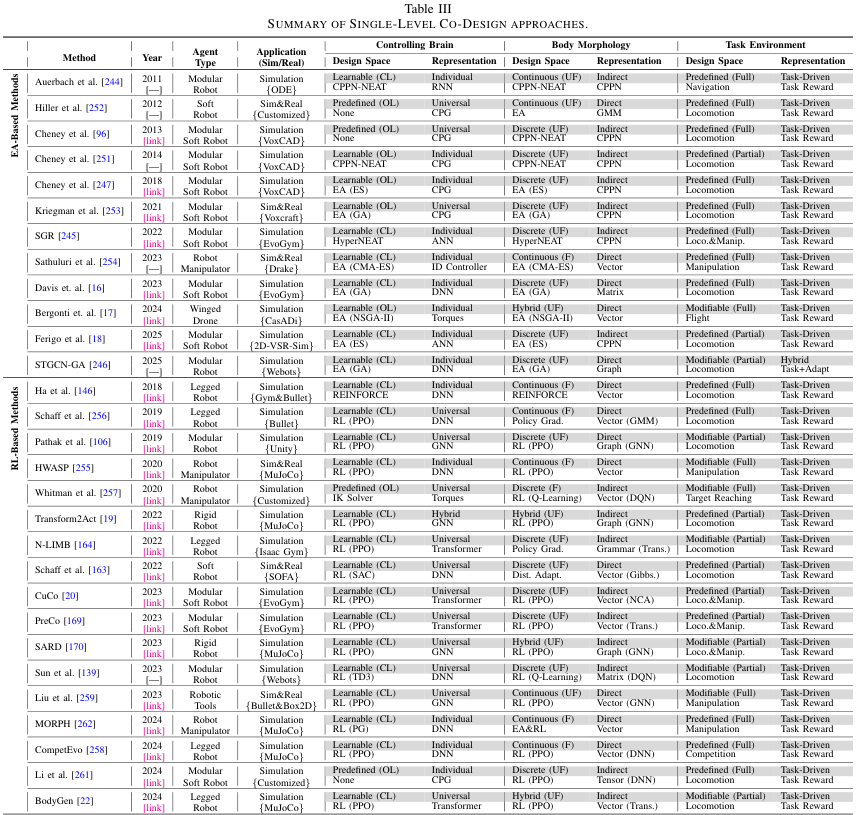
表III 展示了单层协同设计的丰富成果。从基于进化的经典方法到基于物理梯度的前沿探索,这一框架正在快速拓展ECD的边界。
生成式协同设计(Generative Co-Design)引入了当今最火热的生成式AI模型。
传统的进化算法像是在“瞎猫碰死耗子”,而生成模型(如GANs, VAEs, Diffusions)则是在学习了海量数据后进行有目的的创造。
基于规则的方法(Rule-Based)如RoboGrammar,利用图语法约束搜索空间,确保生成的机器人结构合理且可制造。
隐空间方法(Latent-Based)将形态压缩到低维隐空间中进行优化,极大地提高了搜索效率。
最新的大模型方法(Large-Model-Based)则直接让LLM(大型语言模型)参与设计。
LLM拥有丰富的世界知识,可以根据“设计一个能爬梯子的机器人”这样的语义指令,直接给出形态建议。
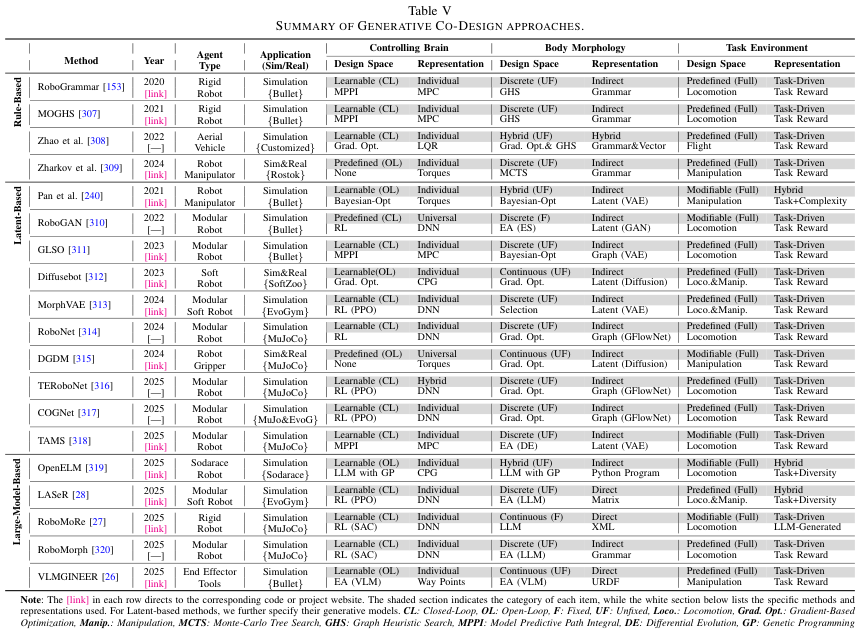
表V展示了生成式设计的代表作。从DiffuseBot利用扩散模型生成软体机器人,到OpenELM利用LLM作为变异算子,AI正在变得越来越像一个富有创造力的设计师。
开放式协同设计(Open-Ended Co-Design)则代表了进化的终极形态。
它不再设定一个终点,而是让任务环境与智能体共同进化。
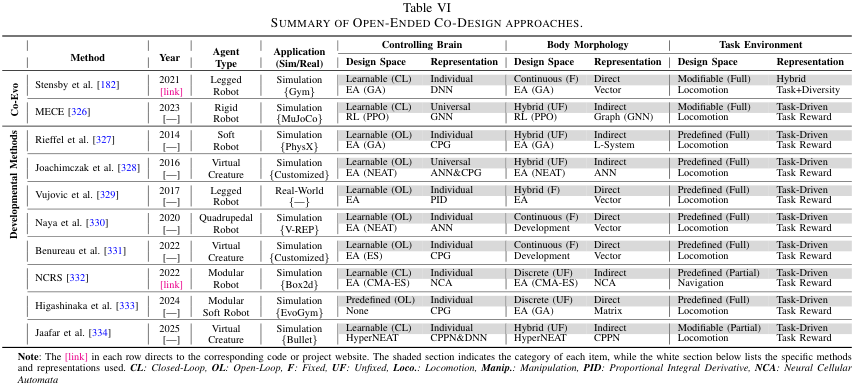
POET算法就是一个典型的例子,环境变得越来越难,倒逼智能体进化出更强的形态和能力。
从数字摇篮到现实世界
所有的这些算法进化都需要一个试验场,这就是物理仿真器。
从经典的MuJoCo、Bullet到支持大规模并行计算的Isaac Gym,再到支持可微物理的Brax和DiffTaichi,仿真器的进步直接推动了ECD的发展。
对于软体机器人,VoxCraft和EvolutionGym提供了像素级的体素模拟,让我们可以像堆乐高一样进化出柔软的生命。
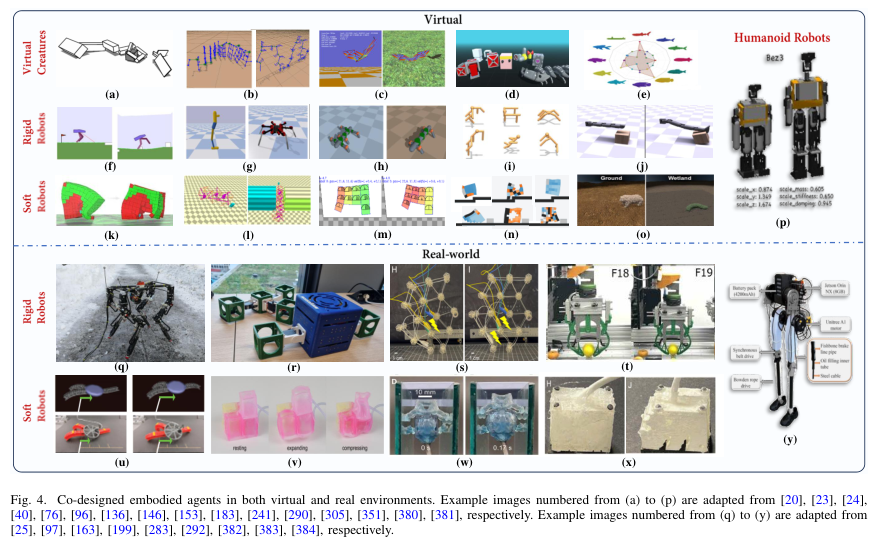
将数字世界中进化出的生物带入现实是ECD的终极考验。
3D打印技术和模块化机器人的发展正在缩小“仿真-现实”的鸿沟。
研究人员已经成功制造出能根据地形改变形状的爬行机器人,以及能自我组装的模块化机器人。
前方的挑战依然艰巨。
如何在巨大的设计空间中保持搜索效率,如何让仿真中的成功完美复制到充满噪声的现实世界,如何设计出真正的通用机器人而非单一任务专家,这些都是未来需要攻克的难题。
人类设计师与AI的协作(Human-AI Collaborative ECD)或许是近期的最佳解法。
人类提供创意和安全边界,AI负责繁琐的形态优化和控制匹配,共同谱写具身智能进化的新篇章。
生物进化用了亿万年才造就了我们,而具身协同设计正试图在硅基世界里,用算法和算力加速这一伟大的历程。
参考资料:
https://arxiv.org/pdf/2512.04770
https://github.com/Yuxing-Wang-THU/SurveyBrainBody

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 15
15 0
0- 0



 已为社区贡献236条内容
已为社区贡献236条内容

所有评论(0)