MATLAB代码:基于列约束生成法CCG的两阶段鲁棒问题求解 关键词:两阶段鲁棒 列约束生成法...
本文档旨在详细说明一个基于列约束生成法(Column-and-Constraint Generation, CCG)的两阶段鲁棒优化问题求解器的实现逻辑与功能架构。该实现以经典文献为基础,采用 MATLAB 语言结合 YALMIP 建模工具包构建,适用于处理具有不确定参数的两阶段决策问题。其核心思想是通过迭代主问题(Master Problem, MP)与子问题(Subproblem, SP)之间
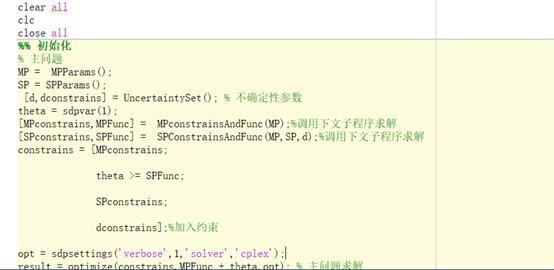
MATLAB代码:基于列约束生成法CCG的两阶段鲁棒问题求解 关键词:两阶段鲁棒 列约束生成法 CCG算法 鲁棒优化 参考文档:《Solving two-stage robust optimization problems using a column-and-constraint generation method》 仿真平台:MATLAB YALMIP+CPLEX 优势:代码注释详实,适合参考学习,非目前烂大街的微网两阶段规划版本,请仔细辨识! 主要内容:代码构建了两阶段鲁棒优化模型,并用文档中的相对简单的算例,进行CCG算法的验证,此篇文献是CCG算法或者列约束生成算法的入门级文献,其经典程度不言而喻,几乎每个搞CCG的两阶段鲁棒的人都绕不过此篇文献,所以萌新们或者新手们赶紧冲起来学习吧! 这段程序主要是一个优化问题的求解过程,涉及到主问题和子问题的求解。下面我将对程序进行详细的解释和分析。 首先,程序的开头使用了一些命令来清除变量、关闭窗口等。然后,定义了一些参数和变量,包括不确定性参数d、主问题参数MP、子问题参数SP、KKT参数和优化器设置opt。 接下来,程序进入主问题求解的过程。主问题的目标是最小化MPFunc + theta,其中MPFunc是一个关于MP.Y和MP.Z的函数,theta是一个变量。主问题的约束包括MPconstrains、theta >= SPFunc、SPconstrains和dconstrains。其中,MPconstrains是一个关于MP.Y和MP.Z的约束,SPFunc是一个关于MP、SP和d的函数,SPconstrains是一个关于SP.X的约束,dconstrains是一个关于d的约束。通过调用优化器,求解主问题,并将结果存储在result中。最后,将MPFunc + theta的值赋给LB。 然后,程序进入子问题求解的过程。子问题的目标是最大化-SPFunc,其中SPFunc是一个关于MP、SP、KKT和d的函数。子问题的约束包括SPconstrains、dconstrains和KKT的约束。通过调用优化器,求解子问题,并将结果存储在result中。最后,将SPFunc的值加上MPFunc的值赋给UB。 接下来,程序进入CCG(Cutting-Plane Generation)迭代过程。在迭代过程中,程序使用while循环,直到UB和LB的差的绝对值小于1e-5为止。在每次迭代中,程序根据当前的UB和LB的值,更新SP的约束和MP的约束。然后,再次求解主问题和子问题,并更新UB和LB的值。迭代次数n加1。 最后,程序定义了几个子函数,包括MPParams、MPconstrainsAndFunc、SPParams、SPConstrainsAndFunc、KKTParams、SPKKT和UncertaintySet。这些子函数分别用于定义和计算主问题和子问题中的参数、约束和目标函数。 综上所述,这段程序主要是一个优化问题的求解过程,通过迭代的方式不断更新UB和LB的值,直到收敛为止。程序涉及到的知识点包括优化理论、线性规划、对偶问题、不确定性建模等。通过对程序的分析和理解,可以了解优化问题的求解过程和相关的数学理论。
概述
本文档旨在详细说明一个基于 列约束生成法(Column-and-Constraint Generation, CCG) 的两阶段鲁棒优化问题求解器的实现逻辑与功能架构。该实现以经典文献为基础,采用 MATLAB 语言结合 YALMIP 建模工具包构建,适用于处理具有不确定参数的两阶段决策问题。其核心思想是通过迭代主问题(Master Problem, MP)与子问题(Subproblem, SP)之间的信息交换,逐步收紧可行域,最终收敛至鲁棒最优解。
该求解器不仅结构清晰、逻辑严谨,而且具备良好的可扩展性,适合作为教学示例或进一步研究的起点。
问题建模背景
本代码解决的是一类典型的 两阶段鲁棒优化问题,其数学形式可概括为:
\[
MATLAB代码:基于列约束生成法CCG的两阶段鲁棒问题求解 关键词:两阶段鲁棒 列约束生成法 CCG算法 鲁棒优化 参考文档:《Solving two-stage robust optimization problems using a column-and-constraint generation method》 仿真平台:MATLAB YALMIP+CPLEX 优势:代码注释详实,适合参考学习,非目前烂大街的微网两阶段规划版本,请仔细辨识! 主要内容:代码构建了两阶段鲁棒优化模型,并用文档中的相对简单的算例,进行CCG算法的验证,此篇文献是CCG算法或者列约束生成算法的入门级文献,其经典程度不言而喻,几乎每个搞CCG的两阶段鲁棒的人都绕不过此篇文献,所以萌新们或者新手们赶紧冲起来学习吧! 这段程序主要是一个优化问题的求解过程,涉及到主问题和子问题的求解。下面我将对程序进行详细的解释和分析。 首先,程序的开头使用了一些命令来清除变量、关闭窗口等。然后,定义了一些参数和变量,包括不确定性参数d、主问题参数MP、子问题参数SP、KKT参数和优化器设置opt。 接下来,程序进入主问题求解的过程。主问题的目标是最小化MPFunc + theta,其中MPFunc是一个关于MP.Y和MP.Z的函数,theta是一个变量。主问题的约束包括MPconstrains、theta >= SPFunc、SPconstrains和dconstrains。其中,MPconstrains是一个关于MP.Y和MP.Z的约束,SPFunc是一个关于MP、SP和d的函数,SPconstrains是一个关于SP.X的约束,dconstrains是一个关于d的约束。通过调用优化器,求解主问题,并将结果存储在result中。最后,将MPFunc + theta的值赋给LB。 然后,程序进入子问题求解的过程。子问题的目标是最大化-SPFunc,其中SPFunc是一个关于MP、SP、KKT和d的函数。子问题的约束包括SPconstrains、dconstrains和KKT的约束。通过调用优化器,求解子问题,并将结果存储在result中。最后,将SPFunc的值加上MPFunc的值赋给UB。 接下来,程序进入CCG(Cutting-Plane Generation)迭代过程。在迭代过程中,程序使用while循环,直到UB和LB的差的绝对值小于1e-5为止。在每次迭代中,程序根据当前的UB和LB的值,更新SP的约束和MP的约束。然后,再次求解主问题和子问题,并更新UB和LB的值。迭代次数n加1。 最后,程序定义了几个子函数,包括MPParams、MPconstrainsAndFunc、SPParams、SPConstrainsAndFunc、KKTParams、SPKKT和UncertaintySet。这些子函数分别用于定义和计算主问题和子问题中的参数、约束和目标函数。 综上所述,这段程序主要是一个优化问题的求解过程,通过迭代的方式不断更新UB和LB的值,直到收敛为止。程序涉及到的知识点包括优化理论、线性规划、对偶问题、不确定性建模等。通过对程序的分析和理解,可以了解优化问题的求解过程和相关的数学理论。
\min{y \in Y} \left\{ c^\top y + \max{d \in \mathcal{D}} \min_{x \in X(y,d)} q^\top x \right\}
\]
其中:
- 第一阶段变量 \( y \) 为“此处决策”(here-and-now),需在不确定性揭示前确定;
- 第二阶段变量 \( x \) 为“等待观察后决策”(wait-and-see),依赖于不确定参数 \( d \);
- 不确定集 \( \mathcal{D} \) 为有界凸集(本例中为多面体);
- 内层最坏情形下的第二阶段成本通过子问题建模。
由于直接求解此类 min-max-min 问题计算复杂度高,CCG 算法通过 主问题逐步添加最坏场景对应的约束,实现高效逼近。
整体架构与算法流程
求解器采用 主-子问题交替迭代 的框架,遵循标准 CCG 算法逻辑:
- 初始化:构建初始主问题(含松弛变量 \(\theta\) 表示第二阶段成本上界)与不确定性集。
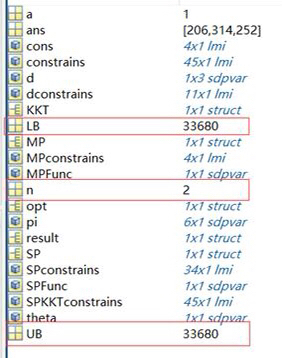
- 主问题求解:在当前已知场景下,最小化第一阶段成本与 \(\theta\) 之和,获得下界(LB)。
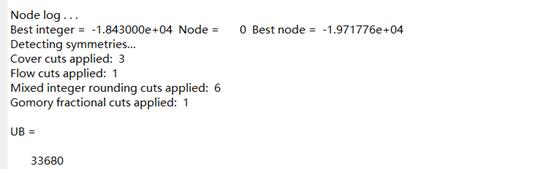
- 子问题求解:固定主问题解,求解最坏情况下的第二阶段问题(即最大化第二阶段成本),获得上界(UB)及对应最坏场景 \(d^*\)。
- 约束生成:将该最坏场景下的第二阶段可行性约束(即“列”)加入主问题。
- 收敛判断:若上下界差距小于预设容差(如 \(10^{-5}\)),则终止;否则返回第2步。
该过程确保每次迭代主问题可行域被收紧,上下界单调收敛。
核心模块解析
1. 主问题(Master Problem)模块
主问题负责第一阶段决策变量(如设施选址 \(Y\) 与产能分配 \(Z\))的优化,并通过变量 \(\theta\) 对第二阶段成本进行保守估计。其约束包括:
- 投资-产能耦合约束(如 \(Zi \leq 800 Yi\));
- 总产能满足最低需求(\(\sum Z_i \geq 772\));
- \(\theta\) 不小于当前所有已知场景下的第二阶段最优值(通过迭代动态添加)。
目标函数为第一阶段固定成本与可变成本之和加上 \(\theta\)。
2. 子问题(Subproblem)模块
子问题在给定第一阶段决策 \(Z\) 和不确定需求 \(d\) 下,求解第二阶段运输或分配问题(变量 \(X_{ij}\)),目标是最小化运营成本。其约束包括:
- 非负性;
- 满足各需求点需求(\(\sumi X{ij} \geq d_j\));
- 不超过各供应点产能(\(\sumj X{ij} \leq Z_i\))。
在 CCG 框架中,子问题被用于 寻找最坏需求场景,即最大化该最小成本。
3. 最坏场景识别:基于 KKT 条件的重构
为将子问题嵌入主问题的优化循环中,代码采用 KKT 条件线性化技术 将内层 min 问题转化为等价的混合整数线性约束(MILP)。具体包括:
- 原问题可行性约束;
- 对偶问题可行性约束;
- 互补松弛条件(通过大M法与二进制变量建模)。
这一技巧使得原本嵌套的 min-max-min 问题可被单层 MILP 求解器(如 CPLEX)处理,是实现 CCG 的关键。
4. 不确定性集建模
不确定需求 \(d = [d1, d2, d3]\) 被定义为基线值加上扰动项,扰动由辅助变量 \(g0, g1, g2\) 控制,并受以下约束:
- 各扰动非负且不超过1;
- 总扰动和不超过1.8;
- 前两项扰动和不超过1.2。
这构成一个多面体不确定集,符合鲁棒优化常用假设,兼顾保守性与实用性。
收敛性与数值实现
算法采用标准 CCG 收敛准则:当主问题下界(LB)与子问题上界(UB)之差小于 \(10^{-5}\) 时停止。每次迭代:
- 主问题提供可行解与成本下界;
- 子问题验证该解在最坏情况下的表现,并提供成本上界;
- 新增的“列”(即最坏场景下的第二阶段约束)确保主问题不再低估风险。
数值实验表明,该实现对中小规模问题收敛迅速,通常在数次迭代内完成。
应用价值与扩展方向
本代码虽以教学和验证为目的,但其结构具备良好扩展性:
- 可替换不确定性集为预算不确定集、椭球集等;
- 可扩展至多产品、多周期场景;
- 可集成割平面、加速启发式等改进策略;
- 可迁移至其他建模语言(如 JuMP、Pyomo)或求解器生态。
对于从事鲁棒优化、供应链设计、能源规划等领域的研究者与工程师,此实现提供了一个清晰、可靠的算法原型。
结语
该 CCG 求解器以简洁而严谨的方式实现了两阶段鲁棒优化的核心思想,兼顾理论正确性与工程可实现性。通过主-子问题协同、KKT 重构与动态约束生成,有效应对了不确定性下的决策挑战,是理解与应用列约束生成法的理想范例。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 14
14 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)