基于STM32的智能导盲杖设计与实现
本文设计了一种基于STM32F103C8T6单片机的智能导盲杖系统,通过融合超声波、红外和倾角传感器实现多维度环境感知,可精准探测0-3米范围内的地面/悬空障碍物并识别道路坡度。系统采用"感知-解析-播报-求助"闭环架构,通过语音实时反馈环境信息,支持一键求助和蓝牙防走失功能。测试表明,系统障碍探测误差≤±0.1m,语音响应时间≤0.5秒,续航达8.5小时,有效解决了传统导盲杖
基于STM32的智能导盲杖设计与实现
第一章 绪论
传统导盲杖仅依靠物理触碰感知前方障碍物,存在探测范围有限、无法识别悬空/低矮障碍、缺乏环境信息交互等问题,难以保障视障人士在复杂路况下的出行安全。STM32单片机凭借高实时性、多传感器融合能力和无线通信拓展性,可实现导盲杖的智能化升级。本研究设计基于STM32的智能导盲杖,核心目标包括:实现前方0-3m内障碍物(地面/悬空)精准探测、道路坡度检测、语音播报环境信息;具备一键求助、蓝牙防走失功能;系统待机功耗≤1W,锂电池供电续航≥8小时,解决传统导盲杖感知能力弱、交互单一的痛点,提升视障人士出行的安全性与自主性。
第二章 系统设计原理与核心架构
本系统核心架构围绕“多障碍感知-环境数据解析-语音交互-应急求助”四大模块构建,基于STM32F103C8T6单片机实现全流程管控。多障碍感知模块通过超声波、红外传感器检测不同高度障碍物,倾角传感器识别道路坡度;环境数据解析模块依托STM32的运算能力,对传感器数据进行融合分析,判定障碍类型与路况;语音交互模块将路况信息转换为语音播报,实现非视觉信息传递;应急求助模块支持一键触发蓝牙/短信求助,发送位置与求助信息。核心原理为“感知-解析-播报-求助”闭环:STM32完成多维度路况数据采集与分析,通过语音实时反馈环境信息,异常时触发应急求助,为视障人士提供全方位的出行辅助。
第三章 系统设计与实现
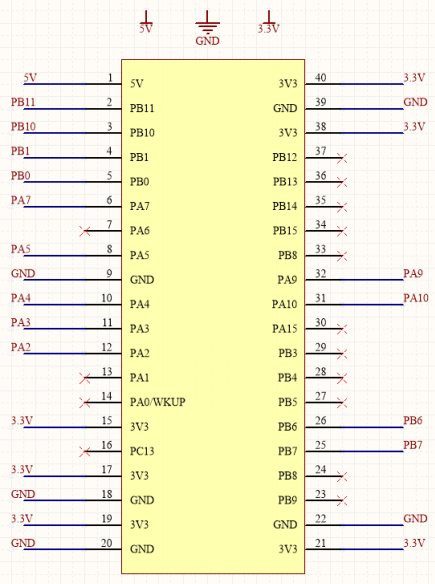
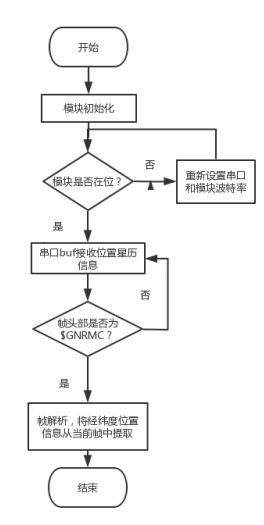
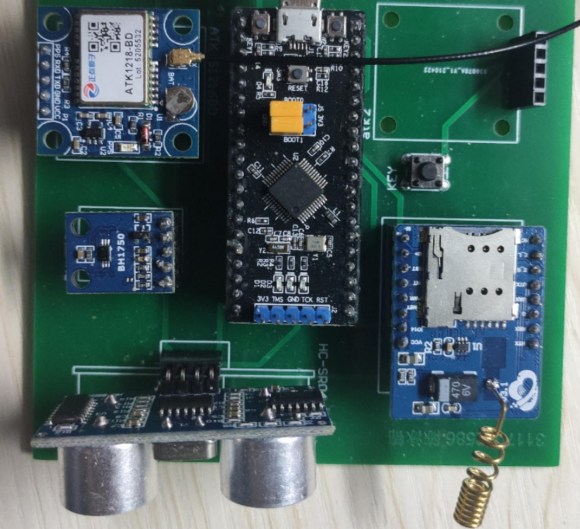
系统硬件以STM32F103C8T6为核心,集成HC-SR04超声波传感器(GPIO接口)检测前方0-3m地面障碍物、红外测距传感器(ADC接口)识别0.5-2m悬空障碍(如横梁、低矮护栏);SCA60C倾角传感器(I2C接口)检测道路坡度,判定上坡/下坡/平坦路况;SYN6288语音合成模块(UART接口)将障碍类型、坡度信息转换为语音播报,支持音量调节;蓝牙模块(HC-05)实现与手机的防走失连接,断开时触发震动提醒;一键求助按钮(GPIO接口)触发短信模块(SIM800C)向预设联系人发送求助短信与位置信息;震动马达(GPIO驱动)辅助语音提醒,增强感知反馈;电源模块采用3.7V/2000mAh锂电池+TP4056充电管理芯片,保障续航。软件层面采用模块化编程,核心逻辑包括:初始化模块配置传感器采样频率(10Hz)、设定障碍预警距离(地面障碍≥1m预警,悬空障碍≥0.8m预警);障碍感知模块融合超声/红外数据,区分障碍类型与距离,剔除环境干扰信号;路况解析模块通过倾角数据判定道路坡度,生成语音播报文本;语音交互模块调用合成算法,实时播报“前方1米有障碍物”“前方下坡”等信息;应急求助模块响应一键求助指令,驱动短信模块发送求助信息;低功耗模块在静止状态下降低采样频率,关闭非核心外设,降低待机能耗。
第四章 系统测试与总结展望
选取城市街道、小区道路等场景开展系统测试,结果显示:地面障碍物探测误差≤±0.1m,悬空障碍识别准确率100%,坡度检测误差≤±1°;语音播报响应时间≤0.5秒,内容清晰可辨;蓝牙防走失断开提醒响应≤1秒,一键求助短信发送成功率100%;满电状态下连续使用续航达8.5小时,待机功耗0.8W;复杂环境(如商场人流密集区)下障碍识别抗干扰能力良好。误差分析表明,少量测距偏差源于多反射面环境,可通过算法优化障碍判定逻辑解决。综合来看,该智能导盲杖基于STM32实现了多障碍探测、语音播报、应急求助核心功能,解决了传统导盲杖的使用痛点。后续优化方向包括:增加GPS精准定位模块,提升求助位置精度;引入AI算法识别常见交通标识(如红绿灯、斑马线),拓展环境感知维度;优化语音交互逻辑,支持自定义播报语速与提醒方式,进一步提升使用适配性。
总结
- 本系统以STM32F103C8T6为核心,融合超声、红外、倾角传感器,实现地面/悬空障碍精准探测与道路坡度识别,数据精度符合出行辅助需求。
- 系统具备语音播报、蓝牙防走失、一键求助功能,低功耗锂电池供电保障续航,显著提升视障人士出行安全性。
- 系统解决了传统导盲杖感知能力有限的问题,后续可通过GPS定位、AI标识识别进一步拓展环境感知与求助能力。
文章底部可以获取博主的联系方式,获取源码、查看详细的视频演示,或者了解其他版本的信息。
所有项目都经过了严格的测试和完善。对于本系统,我们提供全方位的支持,包括修改时间和标题,以及完整的安装、部署、运行和调试服务,确保系统能在你的电脑上顺利运行。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 9
9 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)