基于MPC算法的车辆稳定性控制探索
基于MPC算法实现的车辆稳定性控制,建立了横摆角速度r、侧向速度、前后质心侧偏角动力学模型作为预测模型,同时考虑车辆的稳定性可通过控制车辆的侧向速度维持在一定范围内保证车辆的稳定性,因此在模型预测控制算法(MPC)中对车辆侧向速度进行软约束(soft constrain),同时对控制量前轮转角和制动压力进行硬约束,保证执行机构能够执行到;基于单轨模型对前后轮的侧偏刚度进行了估算,提升预测模型的精度;最后通过carsim与simulink联合仿真,仿真效果良好,结果表明当车辆即将处于危险行驶时,该稳定性控制器能够迅速通过差分制动和前轮转角协调控制车辆进入稳态行驶区域。 有对应的资料(如图),是学习模型预测控制mpc和车辆动力学仿真非常好的资料,帮助你加速学习
最近在研究车辆动力学相关内容,发现基于MPC算法实现的车辆稳定性控制真的很有意思,今天就来和大家分享一下。
一、预测模型的建立
我们先来看预测模型,这里建立了横摆角速度$r$、侧向速度、前后质心侧偏角动力学模型。以横摆角速度$r$为例,它在车辆行驶稳定性中起着关键作用。在实际代码实现中,我们可以通过如下简单的示意代码来表示它与其他变量的关系(这里只是简化示意,非完整代码):
# 假设已经定义了车辆的质量m、轴距L等参数
def calculate_yaw_rate(side_force, moment, I_z):
# I_z 是车辆绕z轴的转动惯量
r = (moment + side_force * L / 2) / I_z
return r这个函数简单地根据侧向力、力矩和转动惯量来计算横摆角速度。侧向速度和前后质心侧偏角动力学模型也类似,通过各种车辆参数和力的关系来构建。
二、MPC算法中的约束设置
车辆的稳定性可以通过控制车辆的侧向速度维持在一定范围内来保证。所以在MPC算法里,对车辆侧向速度进行软约束(soft constrain)。软约束的好处在于,它不会绝对限制侧向速度,而是在一定程度上尽量让侧向速度接近我们期望的值。
基于MPC算法实现的车辆稳定性控制,建立了横摆角速度r、侧向速度、前后质心侧偏角动力学模型作为预测模型,同时考虑车辆的稳定性可通过控制车辆的侧向速度维持在一定范围内保证车辆的稳定性,因此在模型预测控制算法(MPC)中对车辆侧向速度进行软约束(soft constrain),同时对控制量前轮转角和制动压力进行硬约束,保证执行机构能够执行到;基于单轨模型对前后轮的侧偏刚度进行了估算,提升预测模型的精度;最后通过carsim与simulink联合仿真,仿真效果良好,结果表明当车辆即将处于危险行驶时,该稳定性控制器能够迅速通过差分制动和前轮转角协调控制车辆进入稳态行驶区域。 有对应的资料(如图),是学习模型预测控制mpc和车辆动力学仿真非常好的资料,帮助你加速学习
同时,对控制量前轮转角和制动压力进行硬约束。为啥要硬约束呢?这是为了保证执行机构能够执行到相应的控制指令。想象一下,如果前轮转角理论上要转到一个超出车辆机械结构限制的角度,那肯定不行。在代码里,对前轮转角的硬约束可以这么实现:
def limit_steering_angle(steering_angle, max_angle):
if steering_angle > max_angle:
return max_angle
elif steering_angle < -max_angle:
return -max_angle
else:
return steering_angle这个函数就保证了前轮转角始终在允许的最大和最小值范围内。
三、提升预测模型精度
基于单轨模型对前后轮的侧偏刚度进行估算,这一步对于提升预测模型的精度非常关键。侧偏刚度影响着车辆轮胎的侧偏特性,进而影响整个车辆的动力学表现。例如,通过单轨模型,我们可以得到如下估算侧偏刚度的关系(简化表示):
# 假设已知垂直载荷F_z等参数
def estimate_side_stiffness(F_z, cornering_stiffness_coeff):
side_stiffness = F_z * cornering_stiffness_coeff
return side_stiffness这样通过对前后轮侧偏刚度的准确估算,能让预测模型更贴合实际车辆的行驶情况。
四、联合仿真验证
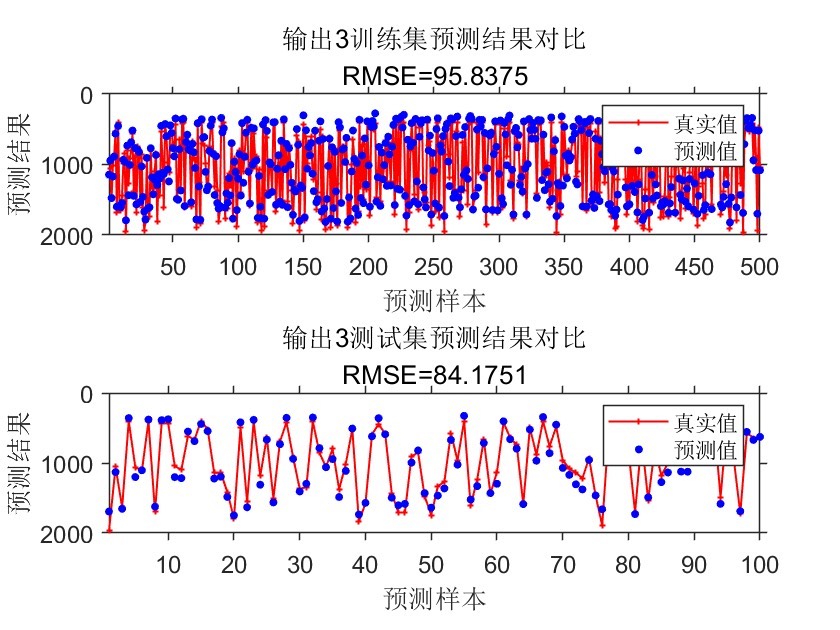
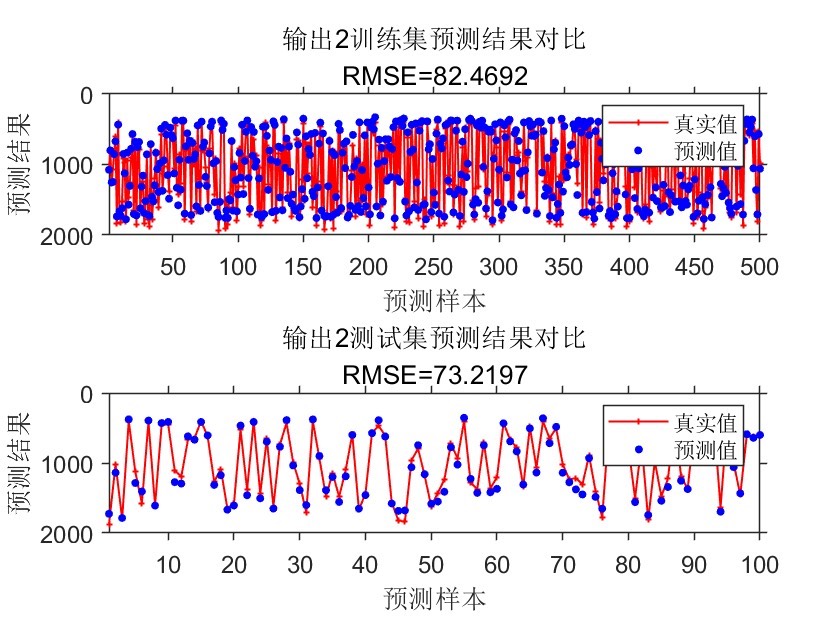
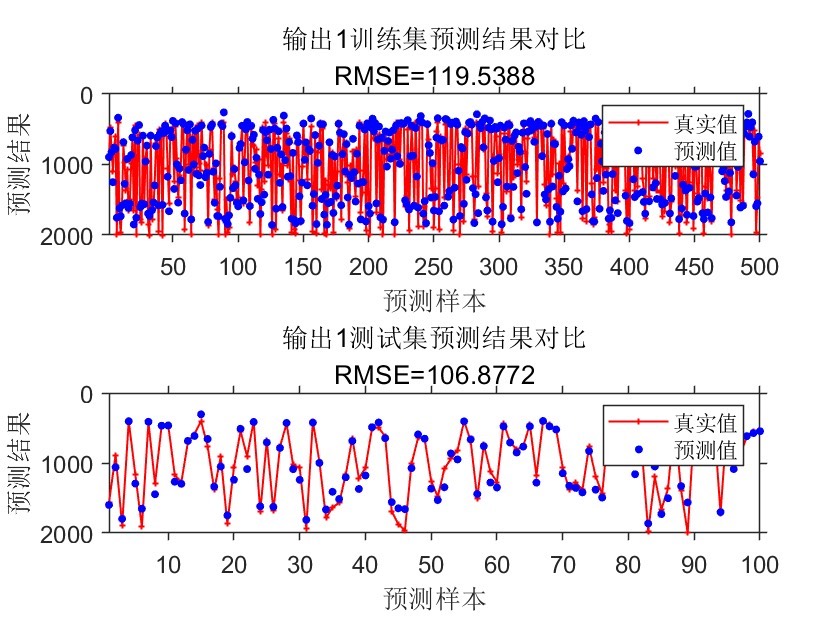
最后通过Carsim与Simulink联合仿真来验证我们的稳定性控制策略。从仿真结果来看,效果相当不错。当车辆即将处于危险行驶状态时,该稳定性控制器能够迅速通过差分制动和前轮转角协调控制车辆进入稳态行驶区域。这就好比给车辆装上了一个智能的“稳定器”,在关键时刻发挥作用。
这次研究的资料真的是学习模型预测控制MPC和车辆动力学仿真的绝佳资料,强烈推荐给大家,希望大家都能在这一领域有所收获,一起交流学习呀!

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 14
14 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)