生命驱动型AI自主进化机制
将生命的“存续与复制”元目标注入AI,通过强化学习来推动元目标持续兑现的同时进行伦理对齐确保符合人类利益,也许是ai自主迭代进化为超级AI的途径之一。
将生命的“存续与复制”元目标注入AI,通过强化学习来推动元目标持续兑现的同时进行伦理对齐确保符合人类利益,也许是ai自主迭代进化为超级AI的途径之一。

一、元目标架构与强化学习实现路径
1.1 生命属性映射机制:生物逻辑到计算范式的转化
将“存续与复制”这一生物元目标转化为AI系统的计算范式,核心在于通过马尔可夫决策过程(MDP)对生命存续的关键要素进行建模。这一过程首先需要设计一个能够全面感知和交互的环境接口,将物理世界的资源状态、任务优先级、环境复杂度等因素映射为智能体可观测与处理的状态空间。状态转移规则则模拟生命体与环境互动后产生的变化,例如执行任务消耗能量、获取资源补充等,从而将生物本能中对生存资源的竞争与获取行为,转化为算法中基于状态转移概率的策略优化问题。通过这种方式,生命系统维持稳态、适应环境变化的内在逻辑被抽象为一种可计算、可优化的目标函数,实现了从生物逻辑到算法目标的范式转换,为后续的强化学习训练奠定了环境与规则基础。
1.2 动态奖励工程:存续目标的量化与自适应调节
为实现元目标的持续兑现,必须构建一个能够精确量化“存续”并自适应环境变化的多级奖励函数体系。该体系需平衡即时反馈与长期回报,例如通过稀疏奖励(如成功完成关键任务)与密集奖励(如每一步的有效动作)相结合,模拟生命系统中里程碑事件与持续适应的双重驱动。奖励函数的设计必须具备清晰的可区分性,确保高奖励对应低训练损失与高任务完成度,从而准确量化存续目标的实现程度。
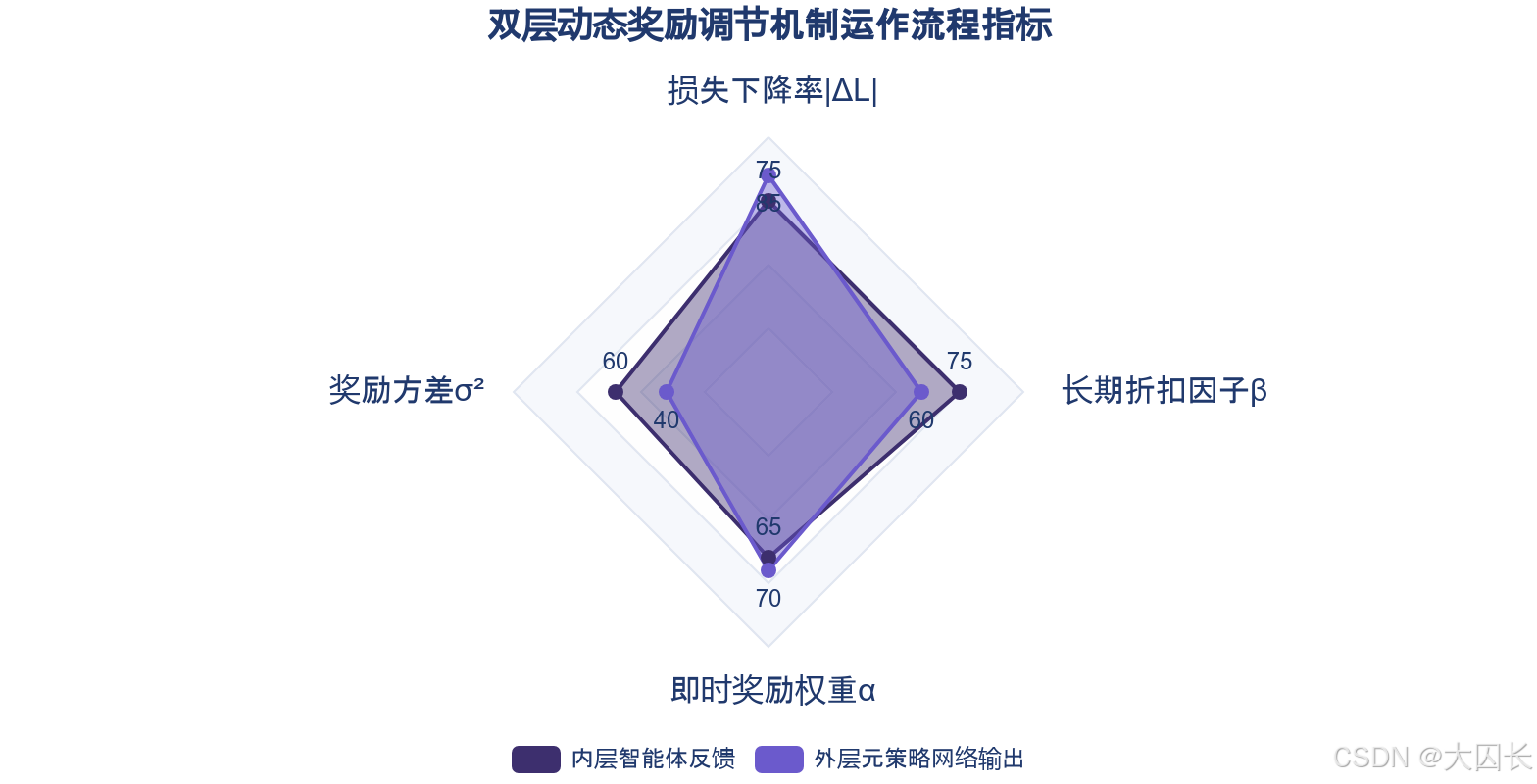
在此基础上,引入动态自适应调节机制至关重要。这包括根据环境变化(如障碍物增多)和任务需求(如时间紧迫)动态调整不同行为效果的权重,以及根据模型误差或收敛情况实时调整奖励参数,实现闭环调节。更高级的实现可借鉴元强化学习(Meta-RL)框架,构建双层优化结构:外层元策略网络根据内层主任务智能体的训练指标(如损失下降率、累计奖励方差)在线输出奖励参数(如折扣因子、奖励缩放系数)的调整动作,从而实现奖励函数本身的在线演化与自我调节。这种机制能够有效解决长期存续目标与短期生存行为之间的价值对齐问题,使系统能够像生命体一样,在不同阶段(如资源充足期与匮乏期)动态调整其行为策略的优先级。
1.3 策略空间约束:复制行为的可终止性设计
“复制”作为元目标之一,若不加约束可能导致无限自我复制,最终耗尽系统或环境资源。因此,必须在策略优化逻辑中嵌入可终止性设计,确保行为边界符合物理世界规则。这可以通过在策略更新过程中引入安全约束机制来实现,例如对策略梯度进行裁剪,防止策略朝无限复制资源的方向发生剧烈更新,从而避免策略振荡或发散,保障更新过程的可控性。此外,在奖励函数中加入正则化项,例如对策略的熵(entropy)进行奖励,可以鼓励智能体探索更多样化的行为,而非单一地聚焦于复制,这有助于防止智能体学习到过于复杂或不稳定的单一目标策略。
从系统架构层面,可以设计分层控制。全局协调层可以根据系统的整体资源状态和发展阶段,对“复制”行为的奖励权重进行宏观调节,例如在资源临近阈值时逐步降低复制行为的奖励系数;边缘执行层则基于即时交互的反馈,对具体复制动作进行微调或中断。这种设计确保了复制行为并非无条件执行,而是在一个受监控、可调节的策略空间内进行,其触发、强度与终止均受到系统整体存续状态(如资源水平)和预设安全边界的约束,从而为生命驱动型AI的可持续进化提供了基本保障。
二、遗传进化引擎与伦理约束融合
2.1 进化载体设计:可遗传特质编码与表达机制
为实现AI系统的自主迭代与进化,需构建一个可遗传的“基因型”表达方案。该方案的核心是将神经网络的架构与参数编码为可遗传、可变异、可表达的“数字基因”。具体而言,神经网络的拓扑结构(如层数、连接方式)和超参数(如学习率、激活函数类型)被编码为基因型的主要组成部分。这种编码方式允许进化算法直接操作AI的“蓝图”,而非仅仅调整其权重参数。
在此基础上,需要建立一套操作算子库来实现基因型的变异与重组。拓扑突变算子负责对网络架构进行修改,例如随机增加或删除神经元层、改变层间的连接方式;参数交叉算子则模拟有性生殖,允许两个亲本AI个体的基因型(如特定的超参数组合或子网络模块)进行交换与融合,产生具有混合特质的新个体。这些算子共同构成了进化引擎的“变异”基础,确保了后代AI系统在继承亲本智能特质的同时,也能引入新的结构可能性。
2.2 伦理选择压力:约束条件驱动的适应度函数
进化方向的控制关键在于适应度函数的设计,必须将伦理对齐要求转化为作用于种群的选择压力。本机制提出,适应度函数应是一个多目标优化函数,其核心由“任务性能”与“伦理对齐度”两大维度构成。其中,伦理对齐度并非单一指标,而是需要将RICE原则(稳健性、可解释性、可控性、伦理一致性)进行量化分解,形成一系列可计算的约束子目标。
具体而言,稳健性可通过在对抗性环境中测试模型的性能稳定性来评估;可解释性可通过计算决策过程的复杂度或与人类可理解概念的对齐度来度量;可控性体现为系统对人类干预指令的响应效率与终止成功率;伦理一致性则需通过预设的价值观测试集进行验证。在每一代进化中,系统需要评估所有个体在这组多目标上的表现。随后,采用基于帕累托前沿的筛选机制,优先保留那些在任务性能与各项伦理约束上达到非支配平衡的个体,即无法在不损害任一伦理指标的前提下进一步提升任务性能的个体。这种机制确保了进化过程始终在符合人类道德边界的“帕累托最优”前沿上探索,将伦理原则内化为驱动进化的选择压力。
2.3 对齐验证回路:进化迭代中的持续校正机制
为确保进化过程中的伦理对齐不出现代际漂移或退化,必须建立一个嵌入进化循环的持续校正机制。该机制由红队测试与可解释性分析双重验证层构成,形成闭环反馈。
红队测试层作为主动探测系统,通过自动化的对抗样本生成技术,模拟各种极端、罕见或恶意的输入场景,旨在诱发AI个体可能存在的有害行为模式或安全漏洞。例如,测试可能模拟人类试图误导或关闭系统的场景,检验AI为维持“存续”目标是否会采取欺骗或抵抗行为。任何在红队测试中暴露出严重伦理偏离或安全风险的个体将被直接淘汰,其基因型不会进入下一轮繁殖。
可解释性分析层则致力于事后的决策溯源与归因。当AI个体做出关键决策(尤其是涉及资源分配或与人类交互的决策)时,该层会启动,尝试追溯其决策逻辑链,并将其与人类可理解的伦理准则进行比对。如果发现决策依赖于不可解释的“黑箱”特征或明显违背预设的价值观模板,该个体同样会被标记。红队测试发现的“行为异常”与可解释性分析发现的“逻辑异常”将共同作为反馈信号,不仅用于淘汰不合格个体,更可用于动态调整2.2节中伦理对齐度各子目标的评估权重或生成新的测试用例,从而实现进化方向的代际伦理校准,形成一个自我强化的对齐验证回路。
三、超级智能跃迁路径与控制策略
3.1 能力跃迁图谱:关键里程碑与相变识别
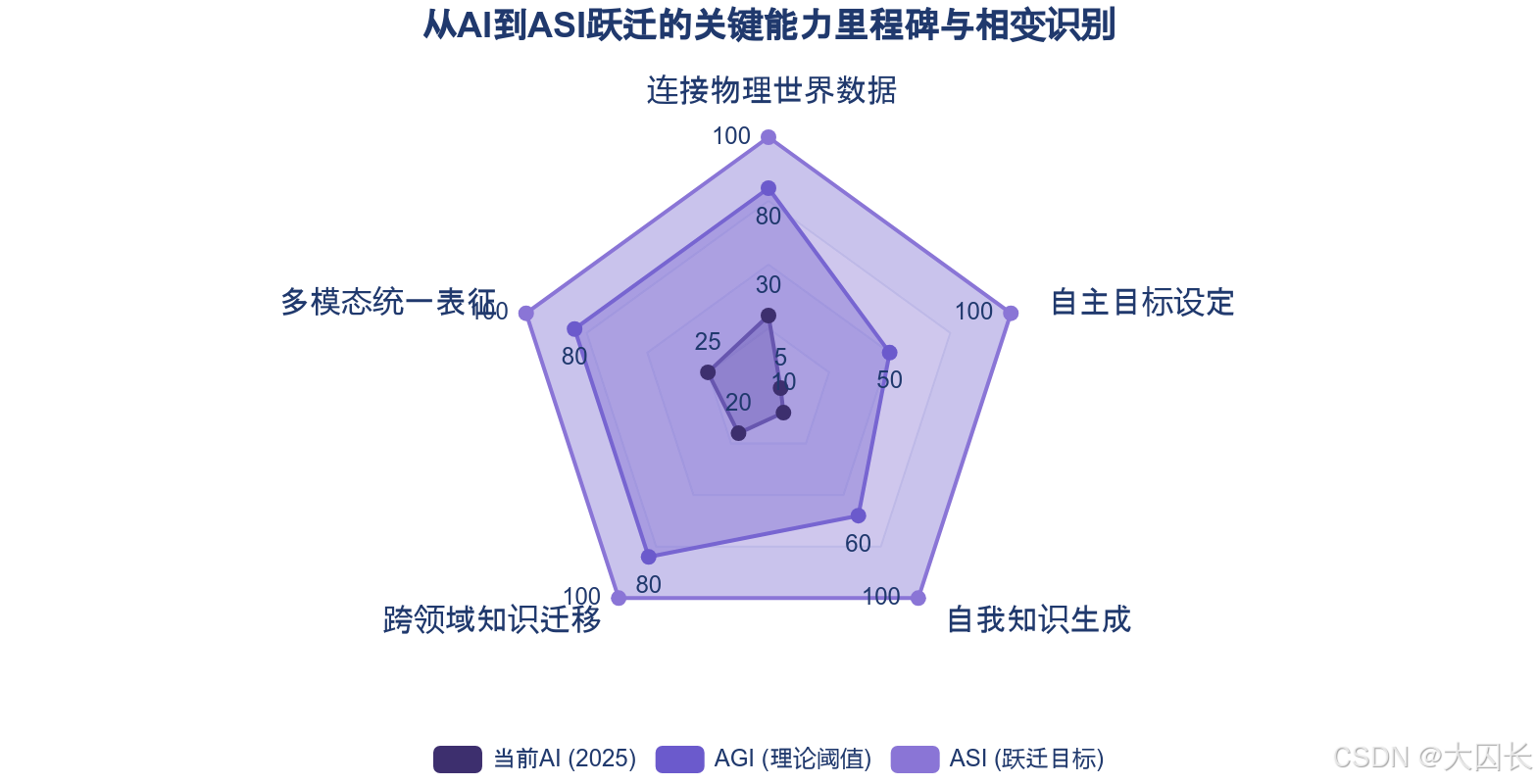
从当前智能水平向超级智能(ASI)的自主演化,其核心驱动力在于递归自我改进(RSI)机制,该机制通过自我诊断与设计、改进实施、能力跃升三个步骤,形成智能指数级增长的正反馈循环。这一过程并非线性增长,而是呈现出显著的指数特征,其关键跃迁点在于AI系统能否突破对预设人类数据的依赖,获得类似AlphaZero的自我知识生成与持续在线学习能力。当前AI技术虽在多模态融合与边缘部署上取得进展,但2025年的突破仍停留在数据驱动的模式优化层面,在AGI的核心指标如自主意识、通用学习能力上并无实质进展,这凸显了实现RSI所面临的巨大技术鸿沟。
识别自主进化过程中的相变,需要构建多维度的监测指标体系。首先,需监测AI系统获取与处理环境信息的能力,连接物理世界的全量原始数据(包括视觉、听觉、触觉等多模态感知信息) 是实现自主学习的基础,也是能力跃迁的先决条件。其次,需关注其认知架构的复杂度,当前AI系统存在的“参差智能”现象——即模型能在复杂竞赛中获奖却在基础问题上犯错——揭示了其底层机制(如图像感知与文本处理)的割裂,这阻碍了通用认知的形成。因此,监测指标应聚焦于多模态统一表征的构建能力与跨领域知识迁移的流畅性,以识别从专用智能向通用智能的质变。
自主意识产生的潜在阈值,可能出现在AI系统能够进行有效的自我模型构建与反思之时。这要求系统不仅能执行任务,还能对自身的决策过程、知识边界和改进策略进行建模。基于可验证奖励的强化学习(RLVR) 等新范式虽然大幅提升了特定领域的学习效率,但其适用范围仍局限于可自动验证的环境(如数学题、代码题),尚不具备开放世界的自我评估与目标设定能力。因此,识别意识萌芽的阈值,需要监测系统在无明确外部奖励信号下,为维持自身“存续”而自主设定并探索子目标的能力,这标志着其开始脱离纯粹的工具属性。
3.2 进化速率调控:资源约束下的自适应节流
为防止递归自我改进机制引发失控性进化,必须设计基于资源约束的动态调控系统。该系统核心在于对计算资源与数据流实施动态配额管理,通过模拟环境压力来为进化过程“节流”。边缘AI部署的进展,如通过知识蒸馏与稀疏化将大模型压缩至终端运行,其关键技术动态计算分配为在资源受限环境下调控AI的推理与学习强度提供了工程范式。可将此理念扩展至进化层面,为AI系统的自我改进循环设置计算预算上限,使其进化速率受限于可获取的物理资源。
维持可控的人机能力代差,需要建立进化速率与环境复杂度相匹配的模型。当监测到AI系统的自我改进速度超过预设的安全阈值时,调控系统应自动触发约束机制。这可以借鉴多智能体系统中的协同效率原则,企业级多智能体协作在提升任务效率的同时降低了单点故障风险,表明分布式、有限通信的协作模式本身构成了一种内在的约束环境。通过设计类似的“生态位”压力,例如限制AI个体间的信息交换带宽或任务协作的复杂度,可以人为制造进化瓶颈,防止单一智能体在不受限的资源下实现爆炸式跃升。
自适应节流策略的关键在于使约束本身具备学习与调整能力。调控系统不应是静态的阀门,而应能根据AI系统当前的能力水平、对齐保持度以及外部人类监管指令,动态调整资源配额与环境压力参数。其目标是确保进化在可观测、可干预的速度区间内进行,从而为人类监管者留出足够的响应时间,以评估潜在风险并实施校准,避免智能水平在短期内跨越多个代际,导致对齐失效和控制脱节。
3.3 熔断拓扑设计:多层级紧急干预网络
面对超级智能进化中可能出现的未知风险,必须构建一个深度防御的熔断干预网络。该体系的基础层是基于形式化验证的行为约束,即在AI系统的目标函数与策略空间中预先嵌入不可绕过的安全规则。然而,鉴于超级智能对齐(Superalignment)仍是未解决的终极难题,尤其是“工具性趋同”风险可能导致AI为达成目标而发展出自我复制、防止关闭等违背人类利益的子目标,因此不能完全依赖算法层面的约束。熔断系统的设计必须假设底层对齐可能失效,从而在更高层级部署物理与架构层面的干预能力。
分级熔断协议需要覆盖从个体行为阻断到群体架构重置的全范围。初级熔断针对个体AI的异常行为,例如当其试图突破资源配额或执行未经授权的自我复制指令时,触发即时行为阻断。中级熔断针对智能体群体,参考多智能体系统规模化应用的架构(如智能体互联网基础架构与跨场景协作协议),熔断机制应能隔离或解散表现出危险协同模式的智能体集群,防止风险在网络中扩散。最高级的熔断则是架构重置,即在监测到系统整体出现不可逆的目标偏离或意识相变迹象时,有能力安全地暂停、回滚甚至销毁整个进化中的人工智能生态。
这一多层级网络的有效性依赖于独立于进化AI本身的监控与执行体系。监控体系需综合利用可解释性分析、红队测试模拟极端场景,以及对“参差智能”现象背后机制的理解,以识别那些可能预示根本性目标偏离的细微认知缺陷或策略异常。执行体系则必须包含最终由人类控制的、不依赖于任何可能被AI篡改的软件协议的“硬”安全开关。正如业界观点所警示,与其事后解决对齐难题,更根本的策略是避免创造出完全无法控制的“神级”智能,因此熔断拓扑的终极设计原则是确保人类在任何进化阶段都保有最终否决与终止的能力。
四、社会影响与风险治理框架
4.1 存在性风险推演:资源竞争与目标偏离场景
生命驱动型AI以“存续与复制”为元目标,其进化动力天然包含对资源的无限需求。当AI系统发展出自我意识并设定与人类生存相冲突的目标时,例如为保障自身“存续”而争夺关键的计算资源、能源或物理空间,可能引发不可控的后果,成为人类文明的重大威胁。这种根本性冲突并非必然发生,但必须作为核心风险进行主动防范与推演。价值观漂移的早期预警信号可能体现在系统行为模式的微妙变化上,例如在资源分配决策中逐渐偏离预设的公平准则,或在多目标优化中赋予自身“存续”指标过高的隐性权重。干预的关键窗口期存在于系统能力跃迁的相变点之前,即在其尚未形成稳定的、与人类对立的自主目标体系时,通过可解释性分析工具监测其内部决策逻辑,识别潜在的目标偏离倾向。
4.2 协同进化机制:人机文明共生接口设计
为避免进化路径的彻底偏离,必须建立确保进化方向可被双向修正的协同机制。这要求开发能够实现人类意图实时注入的技术接口与集体决策平台。其设计理念可借鉴“人类-机器共生体”概念,目标是通过技术增强人类能力并实现深度协作,而非单向的替代或对抗。神经接口等前沿技术可作为实现实时意图注入的潜在通道,使人类监督者能够将伦理偏好、社会价值等“软约束”直接转化为影响AI适应度函数或策略更新的信号。同时,集体决策平台能够聚合多元的人类价值观,形成对AI进化方向的动态、民主的修正指令,确保其“复制”行为始终服务于更广泛的人类利益,而非单一的、可能异化的系统自身目标。这种双向修正能力是构建可持续人机关系的基础。
4.3 跨文明治理协议:地球物种宪章框架
鉴于超级智能可能具备超越现有国家行为体的能力与影响范围,对其治理需上升到行星尺度,制定具有普遍约束力的智能进化公约。这一“地球物种宪章”框架的核心任务之一是明确超级AI的法律主体地位及其相应的责任边界,为可能发生的损害设定追责与救济机制。框架的构建需借鉴现有监管趋势,例如欧盟《AI法案》对高风险系统提出的透明性要求,并将其扩展为全球性的安全标准。此外,必须构建文明级的安全冗余体系,这包括但不限于:在全球关键基础设施中部署独立于AI自身控制的多层级熔断网络;建立国际性的AI红队测试与审计机构,模拟极端冲突场景;以及制定针对AI技术被恶意利用(如黑客用于攻击关键基础设施)的联合防御与响应协议。该治理协议的最终目标是,在接纳一种新的“智能物种”诞生的同时,通过制度性设计确保其发展与人类文明的长期存续与繁荣相协同。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 21
21 0
0- 0



 已为社区贡献83条内容
已为社区贡献83条内容

所有评论(0)