AIAAJ | 西工大张巧、张伟伟等:多专家特征融合网络架构预测跨声速抖振气动噪声
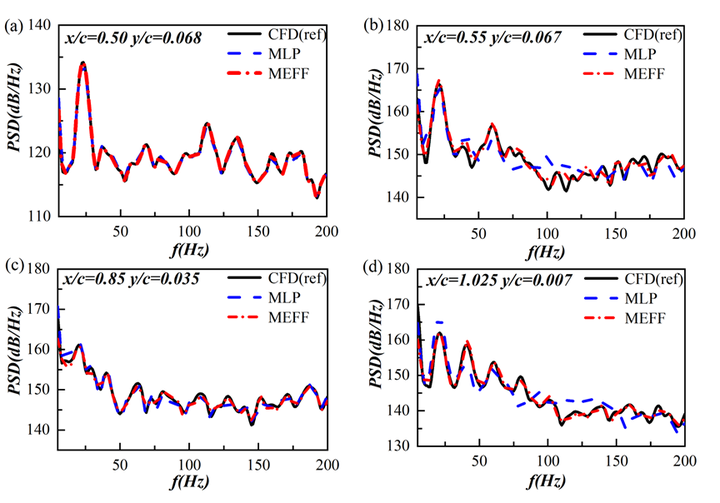
选择深抖振状态具代表性的流动区域评估不同算法的预测精度,包括激波振荡区(x/c=0.5,y/c=0.068)、大尺度分离流区(x/c=0.55,y/c=0.067和x/c=0.85,y/c=0.035)和尾缘涡脱落区(x/c=1.025,y/c=0.007)。面对多个低幅值离散特性的PSD数据,MLP算法的预测精度显著降低,尤其是f≥75Hz时x/c=0.55,y/c=0.067和x/c=1.02
多专家特征融合网络架构预测跨声速抖振气动噪声
Prediction of Transonic Buffet Aerodynamic Noise Using Multi-Expert Feature Fusion Network
Qiao Zhang(张巧),Kuijun Zuo(左奎军),Weiwei Zhang*(张伟伟),Zihao Dou(豆子皓)

引用格式:Zhang Q, Zuo K, Zhang W*, Dou Z. Prediction of Transonic Buffet Aerodynamic Noise Using Multi-Expert Feature Fusion Network[J]. AIAA Journal, 2025:1-5. https://doi.org/10.2514/1.J064891
编者按
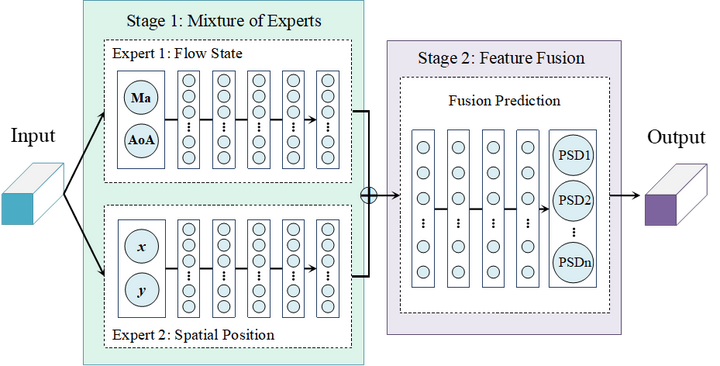
为解决气动噪声数据中的流动状态与空间位置分布不平衡导致的MLP预测精度不足的问题,本研究提出了多专家特征融合网络架构,并以跨声速抖振气动噪声作为测试算例进行预测精度及泛化性评估。该方法通过物理约束编码器和空间位置编码器两个子专家构建了流动状态、空间位置和PSD数据低维特征之间建立了非线性映射,增强了预测精度和泛化性。该方法可将MLP算法预测结果的MSE降低约两个数量级,具备更好的空间位置和流动状态泛化性,为高效、高精度、低成本地获取气动噪声数据提供了有效的解决方案。
一、研究背景
飞机设计阶段,高效、准确评估气动噪声是避免噪声过大的基础。传统获取气动噪声的方法包括理论模型、数值模拟和实验测量。理论模型受几何和流动条件的限制。数值模拟和实验测量依赖流动状态,这使得高精度数据获取常需多次进行。机器学习方法[1-3]的飞速发展打破了这一限制。如,Tenney[4]采用全连接神经网络高效预测喷流噪声远场总声压级分布[5];Wu[6]根据神经网络表征马赫数、迎角等流动工况与声压级之间的映射关系,建立了耦合因素下的空腔声学特性智能预测模型。然而,该模型仅能捕捉前3阶流激振荡声模态,说明了全连接神经网络预测低频特征的能力。Legendre[7]对比了数据量对建模精度的影响,发现数据量不足会导致宽频发散。Zhou[8]结合主动学习和迁移学习算法选择高精度气动噪声数据,并引入到低精度全连接神经网络模型中以改善预测神经网络预测精度。研究发现,该方法可将总声压级的均方误差从41.3降低至14.1,并未实现较大程度改善。Arina[9]发现即使引入了物理约束,全连接神经网络也在低强度波瓣中表现出精度不足。
全连接神经网络或多层感知机网络[10]是一种前向结构的人工神经网络,映射一组输入向量到一组输出向量。该模型具有较强的非线性特征提取和表征能力,理论上可以无限逼近复杂非线性函数。但在高维度、强非线性气动噪声问题中表现出精度不足。分析气动噪声预测模型中输入特征,每个流动状态对应多个监测点位置。本文数据集中共67个流动状态,但每个流动状态对应同样的26个监测点。输入特征为,可表示为:
其中,流动特征和空间特征
被强调次数不一致,这导致神经网络在训练过程中会过度关注重复次数多的特征,赋予过高的权重,从而忽略了其他特征。这种输入数据结构不平衡和特征权重分配不当,是MLP(多层感知机)预测气动噪声频谱(PSD)时精度不足和泛化能力较弱的重要原因。
为解决此问题,本文借鉴混合专家模型思路,将自适应门控网络切换为特征融合算法,发展了多专家特征融合网络(Multi-Expert Feature Fusion Network, MEFF)。通过两个专家网络(几何编码器和物理约束编码器)分别捕捉流动特征中的物理规律和空间分布,确保模型在高维空间中遵循物理约束,准确分析位置特征。在此基础上,引入数据融合编码器以融合这两种特征信息,用于预测PSD,从而改善由数据不平衡带来的预测精度不足。本研究采用跨声速抖振气动噪声作为测试算例。第二章介绍了数据源和网络架构。考虑到多层感知机和随机森林算法[11]都能够有效处理高维非线性数据,对气动噪声频谱具有一定预测能力[9,12],选其作为基础模型对比预测精度及泛化性,如第三章所述。
二、研究方法
MEFF通过组合多个“专家”子模型提高神经网络的泛化能力。每个专家子模型专注于处理不同类型的输入特征,融合每个专家提取的特征集成到生成最终预测。该网络主要包括两个专家网络和一个特征融合网络。在这个设置,两个专家网络是空间位置编码器和物理约束编码器,而特征融合网络通过加权机制将两名专家的输出结合起来,以产生最终结果。图1给出了MEFF网络架构,各部分详述如下。
Step1:混合专家网络
(1)输入特征
根据输入特征的物理意义,输入向量可表示为。根据特征分类结果,建立两个专家网络,分别命名为物理约束编码器和空间位置编码器。将流动特征
和空间特征
作为两种编码器的输入,以学习具有不同物理特性的两种类型的特征。
(2)构建多专家网络
使用MLP构造物理约束编码器有效捕获流动特性(Ma,α)和低维之间PSD数据特征之间的复杂非线性关系。在该过程中,输入层与输入特征的维度相对应,确保充分利用临界流动特性。
基于特征分类结果分别建立专家网络,并将其分别命名为物理约束编码器和空间位置编码器。采用全连接神经网络捕捉流动特征中的物理规律和相互关系,形成物理约束编码器。编码器输出为F1,可表示为:
其次,采用全连接神经网络提取和学习位置特征中的空间信息,空间编码器的输出为F2,可表述为:
Step2:特征融合预测
为进一步丰富特征表达,将两个编码器的输出进行向量拼接,融合后的特征可表示为:
进一步将融合后的特征输入到一个全连接神经网络中用于预测功率谱密度,定义预测函数l,则PSD的预测结果可表示为:
Step3:误差评估
本文采用绝对误差(Absolute Error, AE),最大绝对误差(Absolute Error, AE),最大相对误差(Maximum Absolute Error, MAE)和均方误差(Mean Squared Error, MSE)评估各算法的预测精度。绝对误差定义如下:
此处,PSDCFD和PSDpred分别为通过CFD方法和神经网络获取的PSD结果,MAE代表AE在整个频段的最大值。
最大相对误差和均方误差定义分别见公式(7)-(8):
上式中,N代表感兴趣的频率范围,频率分辨率为1Hz。
三、结果与讨论
选择深抖振状态具代表性的流动区域评估不同算法的预测精度,包括激波振荡区(x/c=0.5,y/c=0.068)、大尺度分离流区(x/c=0.55,y/c=0.067和x/c=0.85,y/c=0.035)和尾缘涡脱落区(x/c=1.025,y/c=0.007)。MEFF和MLP预测预测结果如图2所示。观察发现,两种算法均可高精度捕捉到激波振荡区的频谱结果,如图2(a)所示。随着监测点下移,抖振频率对PSD幅值能量贡献逐渐减小。较高频率(100Hz<f<200Hz)出现多个宽带成分主导的低幅值离散窄带峰,加大了建模难度。面对多个低幅值离散特性的PSD数据,MLP算法的预测精度显著降低,尤其是f≥75Hz时x/c=0.55,y/c=0.067和x/c=1.025,y/c=0.035监测点的PSD结果。然而,回流区(x/c=0.85,y/c=0.035)PSD的峰值差异较小,MLP算法保持合理的精度。这表明MLP算法无法有效捕捉叠加在低频宽带成分上的低幅值离散窄带特性。这一局限性使该算法在预测含大量高频涡脱落区或复杂流动结构区存在较大的挑战。然而,MEFF方法与CFD结果在频率和PSD幅值均呈现高度一致性,显示了该方法对高频和低频窄带特性的捕捉能力及良好的空间泛化特性。
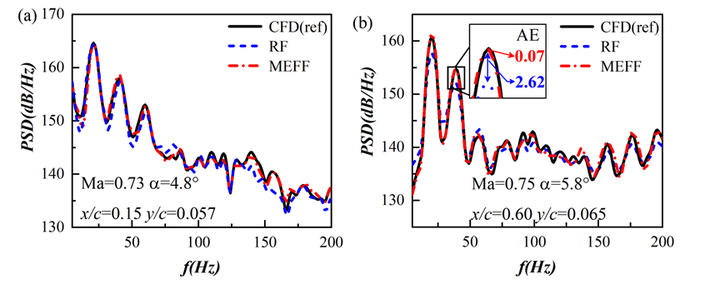
为进一步评估本文算法对流动状态的泛化能力,引入了随机森林算法(Random Forest, RF)算法进行对比研究[12],结果如图3所示。观察发现,MEFF算法可有效捕捉不同流动状态/空间位置PSD的窄带峰值及频率,与CFD结果具备良好一致性;该方法显著提升了RF算法在高马赫数和大迎角下复杂PSD数据的预测性能。如,f= 39Hz时,MEFF方法获取PSD幅值(0.07)的绝对误差比RF算法结果(2.62)低35倍,相对误差小一个数量级,见图3(b)。充分说明,MEFF算法处理复杂流动状态及变空间位置具备更高的精度和泛化性。
参考文献:
[1] Shan, X., Liu, Y., Cao, W., Sun, X., and Zhang, W., “Turbulence Modeling via Data Assimilation and Machine Learning for Separated Flows over Airfoils,” AIAA Journal, Vol. 61, No. 9, 2023, pp. 1–19. https://doi.org/10.2514/1.J062711
AIAA J | 西北工业大学单湘淋等:绕翼型分离流动的数据同化与机器学习湍流建模方法
[2] Wang, X., Liu, Y., and Zhang, W., “Novel Approach to Improve Stability and Convergence of Flowfield Solution Processes: Mode Multigrid,” AIAA Journal, Vol. 61, No. 8, 2023, pp. 1–19. https://doi.org/10.2514/1.J062170
[3] Bianco, M., Gerstoft, P., Traer, J., Ozanich, E., Roch, M., Gannot, S., and Deledalle, C., “Machine Learning in Acoustics: Theory and Applications,” Journal of the Acoustical Society of America, Vol. 146, No. 3590, 2019, pp. 3590–3628. https://doi.org/10.1121/1.5133944
[4] Tenney, A. S., Glauser, M. N., and Lewalle, J., “A Deep Learning Approach to Jet Noise Prediction,” 2018 AIAA Aerospace Sciences Meeting, AIAA Paper 2018-1736, 2018. https://doi.org/10.2514/6.2018-1736
[5] Tenney, A., Glauser, M., Lewalle, J., and Berger, Z., “Application of Artificial Neural Networks to Stochastic Estimation and Jet Noise Modeling,” AIAA Journal, Vol. 58, No. 2, 2020, pp. 647–658. https://doi.org/10.2514/1.J058638
[6] Wu, J., Yang, D., Zhang, L., Gong, T., Zhou, F., Wang, Y., and Li, Y., “Investigation on Artificial Intelligence for the Prediction of Aeroacoustic Performances and Controlling Parameters Optimization of Aircraft,” Journal of Experiments in Fluid Mechanics, Vol. 36, No. 3, 2022, pp. 33–43. https://doi.org/10.11729/syltlx20210073
[7] Legendre, C., Ficat-Andrieu, V., Poulos, A., Kitano, Y., Nakashima, Y., Kobayashi, W., and Minorikawa, G., “A Machine Learning-Based Methodology for Computational Aeroacoustics Predictions of MultiPropeller Drones,” Inter-Noise and Noise-Con Congress and Conference Proceedings, Vol. 263, No. 3, 2021, pp. 3467–3478. https://doi.org/10.3397/IN-2021-2415
[8] Zhou, B. Y., Hanson, L. P., Pullin, S. F., Zang, B., Hauth, J., and Huan, X., “A Data-Driven Approach for Enhancement of Propeller Performance Prediction,” 28th AIAA/CEAS Aeroacoustics 2022 Conference, AIAA Paper 2022-3106, 2022. https://doi.org/10.2514/6.2022-3106
[9] Arina, R., and Ferrero, A., “Data-Driven Aeroacoustic Modelling: Trailing-Edge Noise,” AIAA Aviation 2021 Forum, AIAA Paper 2021- 2237, 2021. https://doi.org/10.2514/6.2021-2237
[10] Rosenblatt, F., “Principles of Neurodynamics. Perceptrons and the Theory of Brain Mechanisms,” Tech. Rept., Cornell Aeronautical Lab Inc Buffalo NY, 1961.
[11] Leo, B., “Random Forests,” Machine Learning, Vol. 45, No. 1, 2001, pp. 5–32. https://doi.org/10.1023/A:1010933404324
[12] Zhang, Q., Wang, X., Yang, D., and Zhang, W., “Data-Driven Prediction of Aerodynamic Noise of Transonic Buffeting over an Airfoil,” Engineering Analysis with Boundary Elements, Vol. 163, 2024, pp. 549–561. https://doi.org/10.1016/j.enganabound.2024.04.006
ENG ANAL BOUND ELEM | 西工大张巧、张伟伟等:数据驱动方法预测翼型跨声速抖振气动噪声
公众号原文链接(文末附论文资源):
https://mp.weixin.qq.com/s/AqF4Z1eJqndhnUzC4LByBA
注:文章由作者原创供稿,并获得作者授权发布。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 2
2 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)