Matlab 基于蚁群算法的二维路径规划算法探索
·
Matlab基于蚁群算法的二维路径规划算法 路径规划算法是指在有障碍物的工作环境中寻找一条从起点到终点的、无碰撞地绕过所有障碍物的运动路径的算法。 代码可正常运行
在复杂的二维空间里,当存在诸多障碍物时,如何让一个智能体从起点顺利抵达终点,且不与任何障碍物发生碰撞呢?这就需要路径规划算法大显身手啦。今天咱们就来聊聊基于蚁群算法的二维路径规划,并用 Matlab 实现它。
蚁群算法原理简单唠唠
蚁群算法受到自然界蚂蚁觅食行为的启发。蚂蚁在寻找食物的过程中,会在走过的路径上留下信息素。其他蚂蚁倾向于选择信息素浓度高的路径,这样随着时间推移,蚂蚁们就会逐渐找到从蚁巢到食物源的最短路径。在路径规划里,我们把起点和终点类比为蚁巢和食物源,把空间里的路径看作蚂蚁可能走过的路线,信息素浓度则指引着最优路径的发现。
Matlab 代码实现
% 初始化参数
n = 50; % 蚂蚁数量
alpha = 1; % 信息素重要程度因子
beta = 5; % 启发函数重要程度因子
rho = 0.1; % 信息素挥发系数
Q = 100; % 信息素强度
iter_max = 100; % 最大迭代次数
m = 100; % 空间维度(假设是100*100的二维空间)
obstacle_num = 20; % 障碍物数量
% 生成障碍物
obstacle = zeros(m,m);
for i = 1:obstacle_num
x = randi([1,m - 10]);
y = randi([1,m - 10]);
obstacle(x:x + 5,y:y + 5) = 1;
end
% 起点和终点
start = [1,1];
end_point = [m,m];
% 初始化信息素矩阵
tau = ones(m,m);
for iter = 1:iter_max
ant_path = zeros(n,2);
for k = 1:n
ant_path(k,:) = start;
while ~isequal(ant_path(k,end - 1:end),end_point)
current = ant_path(k,end - 1:end);
available = [];
% 寻找当前位置可移动的方向
for i = -1:1
for j = -1:1
new_x = current(1)+i;
new_y = current(2)+j;
if new_x >= 1 && new_x <= m && new_y >= 1 && new_y <= m && ~obstacle(new_x,new_y)
available = [available;new_x,new_y];
end
end
end
if isempty(available)
break;
end
% 计算选择各个可移动方向的概率
eta = 1./sqrt((available(:,1)-end_point(1)).^2+(available(:,2)-end_point(2)).^2);
p = tau(sub2ind([m,m],available(:,1),available(:,2))).^alpha.*eta.^beta;
p = p/sum(p);
% 轮盘赌选择下一个位置
next_index = find(rand <= cumsum(p),1);
ant_path(k,end + 1:end + 2) = available(next_index,:);
end
end
% 更新信息素
delta_tau = zeros(m,m);
for k = 1:n
if isequal(ant_path(k,end - 1:end),end_point)
path = ant_path(k,1:end - 1:2);
for i = 1:size(path,1)-1
x1 = path(i,1);
y1 = path(i,2);
x2 = path(i + 1,1);
y2 = path(i + 1,2);
delta_tau(x1,y1) = delta_tau(x1,y1)+Q/sqrt((x2 - x1)^2+(y2 - y1)^2);
end
end
end
tau = (1 - rho).*tau+delta_tau;
end
% 绘制结果
figure;
imagesc(obstacle);
colormap([0 0 0;1 1 1]);
hold on;
[best_iter,~] = min(cellfun(@(x) size(x,1),mat2cell(ant_path(:,1:end - 1:2),ones(n,1),2)));
plot(ant_path(best_iter,1:end - 1:2),ant_path(best_iter,2:end:2),'r','LineWidth',2);
plot(start(1),start(2),'go','MarkerSize',10);
plot(end_point(1),end_point(2),'ro','MarkerSize',10);代码分析
- 参数初始化部分:
- 定义了蚂蚁数量n、信息素和启发函数的重要程度因子alpha和beta、信息素挥发系数rho、信息素强度Q以及最大迭代次数itermax等关键参数。这些参数的取值会影响算法的收敛速度和寻优效果。比如alpha较大时,蚂蚁更倾向于选择信息素浓度高的路径,可能加快收敛,但也容易陷入局部最优;而beta较大时,启发函数(这里用的是与终点的距离)的作用更显著,蚂蚁会更积极地向终点探索。
- 设定了二维空间的维度m和障碍物数量obstaclenum,并通过循环随机生成障碍物在空间中的位置。这里简单地生成了一些小方块作为障碍物。 - 生成障碍物部分:
- 使用randi函数在空间内随机确定障碍物的左上角坐标,然后将一定范围内的网格设为障碍物(这里是5*5的小方块),通过修改obstacle矩阵来标记障碍物位置。 - 初始化信息素矩阵部分:
- 信息素矩阵tau初始化为全 1 矩阵,意味着一开始所有路径对于蚂蚁来说吸引力是相同的,随着迭代进行,信息素会根据蚂蚁的路径选择而发生变化。 - 迭代寻路部分:
- 外循环for iter = 1:iter_max控制迭代次数。在每次迭代中,每只蚂蚁从起点出发开始寻找路径。
- 内循环for k = 1:n对每只蚂蚁进行路径探索。蚂蚁每次从当前位置寻找可移动的方向,通过检查周围网格是否在空间范围内且不是障碍物来确定可移动方向,将这些方向存储在available矩阵中。
- 如果没有可移动方向,蚂蚁的路径探索提前结束(可能是陷入死胡同了)。否则,计算选择各个可移动方向的概率p,这里利用了信息素浓度和启发函数(与终点的距离的倒数)。然后通过轮盘赌选择下一个位置,更新蚂蚁的路径。 - 更新信息素部分:
- 每只蚂蚁完成路径探索后,根据蚂蚁是否成功到达终点来更新信息素。如果蚂蚁到达终点,沿着它走过的路径更新信息素矩阵delta_tau,走过的路径上信息素会增加,增加量与路径长度有关(长度越短,信息素增加越多)。最后,整体更新信息素矩阵tau,考虑了信息素的挥发(乘以1 - rho)和新增加的信息素。 - 绘制结果部分:
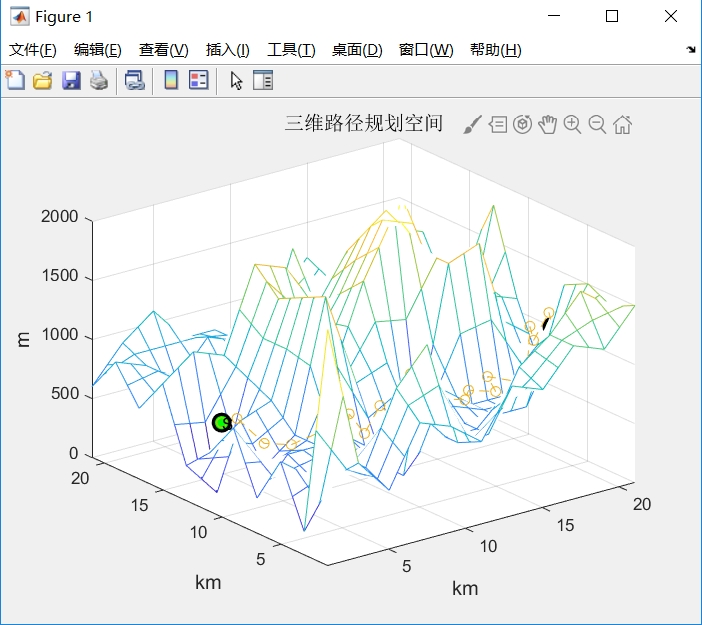
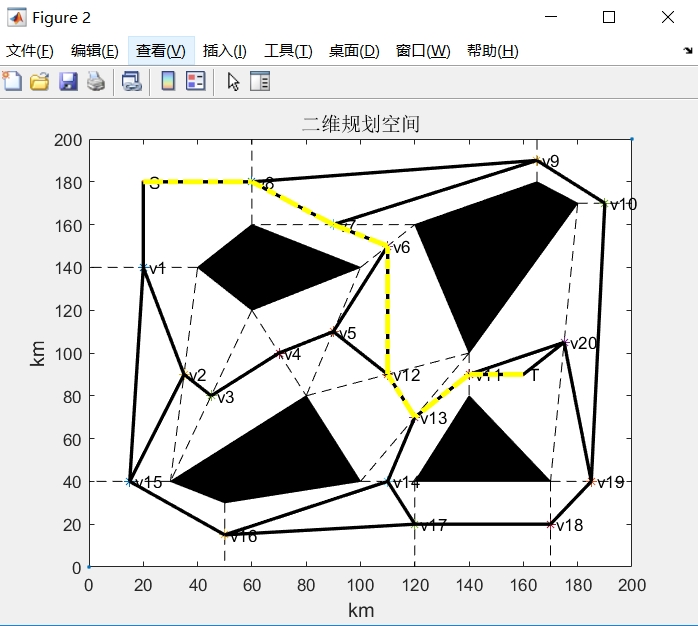
- 使用imagesc函数绘制障碍物的分布,用colormap设置颜色(这里黑色表示障碍物,白色表示可通行区域)。然后绘制找到的最优路径(长度最短的路径),并标记出起点和终点。
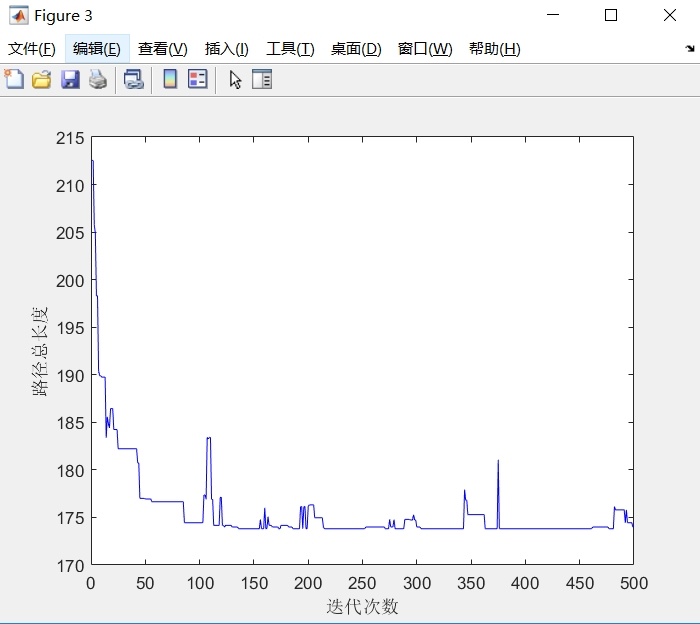
通过这样的代码实现和参数调整,蚁群算法可以在有障碍物的二维空间里为我们找到一条从起点到终点的可行路径,并且随着迭代的进行,路径会逐渐优化。大家可以自己调整参数,看看对路径规划结果有什么影响哦。
Matlab基于蚁群算法的二维路径规划算法 路径规划算法是指在有障碍物的工作环境中寻找一条从起点到终点的、无碰撞地绕过所有障碍物的运动路径的算法。 代码可正常运行

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 31
31 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)