基于带领导者的一阶多智能体系统一致性matlab仿真分析
本文研究带领导者的一阶多智能体系统一致性控制问题。通过建立系统拓扑结构模型,设计基于邻居和领导者信息的控制率,使跟随者状态渐近收敛至领导者状态。理论分析表明,当拓扑连通时误差系统稳定。进一步引入状态预测器优化控制率,利用预测状态加快收敛速度。仿真结果显示,所提方法能有效实现多智能体系统的一致性跟踪。研究为多智能体协同控制提供了理论依据和实现方案。
目录
1.前言
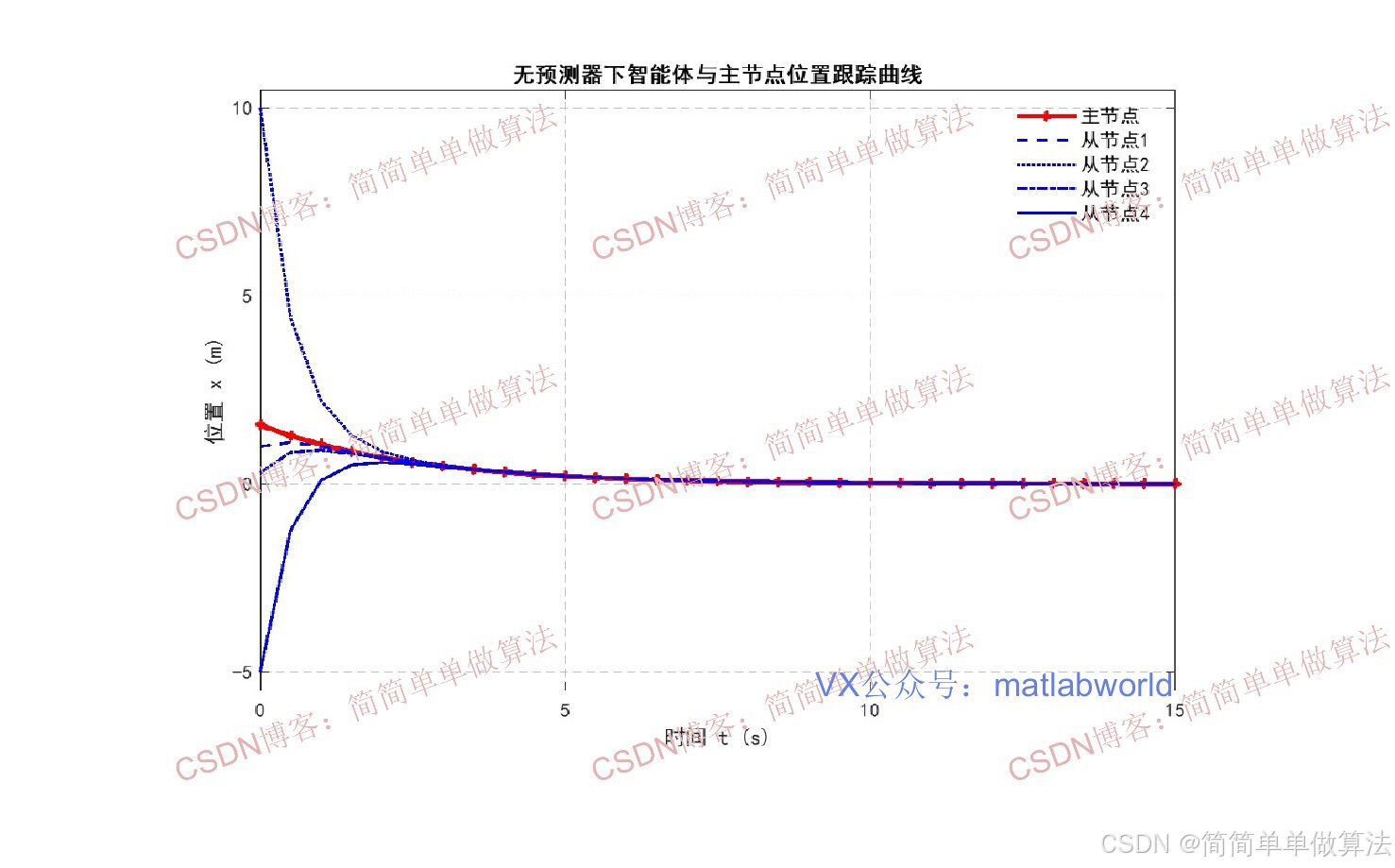
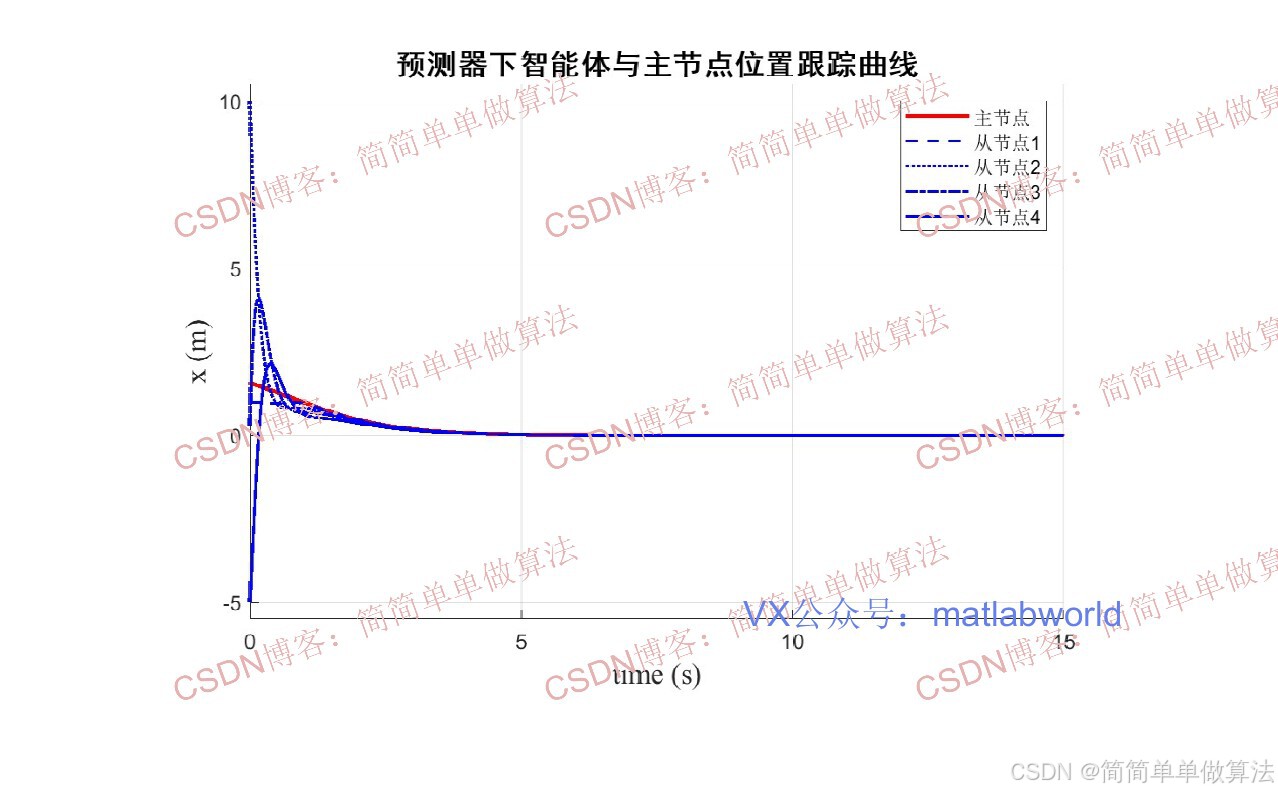
带领导者的一阶多智能体系统中,领导者为动态节点(状态持续变化),跟随者通过与邻居及领导者的信息交互调整自身状态,最终实现所有跟随者状态追踪领导者状态的一致性。核心是设计控制率使跟随者与领导者的状态误差渐近收敛至0,通过加入状态预测器可加快收敛速度,其本质是利用预测的邻居及自身状态优化控制输入,提升系统响应效率。
2.算法测试效果图预览
3.算法运行软件版本
matlab2022b
4.部分核心程序
(完整版代码包含中文注释和操作步骤视频)
.......................................................
figure % 设置图窗位置和大小,避免拥挤
set(gcf, 'Color', 'w') % 图窗背景设为白色,导出无黑边
% 统一保持绘图状态,无需重复写hold on
hold on;
% 1. 主节点:加粗红色实线+轻微标记,突出核心,视觉更醒目
plot(t0:st:tf, q(:,1), 'r-', 'LineWidth', 2, 'Marker', '.', 'MarkerSize', 3, 'MarkerFaceColor', 'r');
% 2. 从节点:区分线条样式(避免单调重叠),统一蓝色系+适当加粗,提升可读性
plot(t0:st:tf, q(:,2), 'b--', 'LineWidth', 1.5); % 虚线
plot(t0:st:tf, q(:,3), 'b:', 'LineWidth', 1.5); % 点线
plot(t0:st:tf, q(:,4), 'b-.', 'LineWidth', 1.5); % 点划线
plot(t0:st:tf, q(:,5), 'b-', 'LineWidth', 1.5); % 实线(轻微透明,避免遮挡)
% 3. 坐标轴标签:统一Times New Roman字体、14号大小,修正重复设置问题
xlabel('time (s)', 'FontName', 'Times New Roman', 'FontSize', 14);
ylabel('x (m)', 'FontName', 'Times New Roman', 'FontSize', 14);
% 4. 标题:优化内容+统一字体,加粗提升层次感
% title('Predictor (预测器)-智能体位置跟踪曲线');
title('预测器下智能体与主节点位置跟踪曲线', 'FontSize', 14, 'FontName', 'SimHei', 'FontWeight', 'bold');
% 5. 图例:优化位置、字体、格式,补充从节点编号,避免遮挡
legend('主节点','从节点1', '从节点2', '从节点3', '从节点4');
grid on;
xlim([min(t0:st:tf), max(t0:st:tf)]);
ylim([min(q(:))-0.5, max(q(:))+0.5]); % 留少量边距,视觉更舒适
hold off;
05_122m5.算法理论概述
5.1 系统建模
定义拓扑结构:用有向图G=(V,E)描述系统,V={0,1,…,n}(0为领导者,1,…,n 为跟随者),E为边集合。子图Ḡ=(V̄,Ē) 表示跟随者间拓扑,邻接矩阵Ā中 a_ij=1((i,j)∈E),否则为0;对角矩阵 B=diag (b₁,…,bₙ) 描述主从节点连接,b_i=1(跟随者 i 与领导者连通),否则为0。
动力学方程: 领导者动态方程:ẋ₀=-k₀x₀+u₀(k₀>0 为位置反馈增益,x₀为领导者位置,u₀为其输入且有界、对跟随者不可知)
跟随者动态方程:ẋᵢ = -k₀xᵢ + uᵢ(xᵢ为跟随者 i 位置,uᵢ为控制输入)
5.2 控制率设计
设计跟随者控制率,使跟随者根据邻居及领导者状态调整输入:
uᵢ=-∑a_ij (xᵢ - xⱼ) - bᵢ(xᵢ - x₀) + k₀xᵢ
其中,∑a_ij (xᵢ - xⱼ)体现跟随者间状态协调,-bᵢ(xᵢ - x₀)实现对领导者的追踪,k₀xᵢ用于抵消动力学方程中的反馈项。
5.3 一致性分析
定义状态误差:令εᵢ=xᵢ - x₀(ε=[ε₁,…,εₙ]ᵀ为误差向量),一致性等价于t→∞时εᵢ→0。
误差动力学推导:
ẋᵢ - ẋ₀=[-k₀xᵢ + uᵢ] - [-k₀x₀ + u₀]
代入控制率化简得矩阵形式:
ε̇ =-(L + B)ε + (k₀x₀ - u₀)
其中L为跟随者拓扑的拉普拉斯矩阵,1为全1列向量。当图G连通时,矩阵H=L+B的特征值均为正,-(L+B)的特征值位于复平面左半平面,误差系统稳定,原系统实现一致。
5.4 加入状态预测器优化
状态预测器设计:xᵢᵖ = -(L + B) x + Bx₀1(xᵢᵖ为跟随者i的预测状态,x=[x₁,…,xₙ]ᵀ)
优化控制率:
uᵢ = -∑a_ij (xᵢ - xⱼ) + γ∑a_ij (xᵢᵖ - xⱼᵖ) - bᵢ(xᵢ - x₀) + γbᵢxᵢᵖ + k₀xᵢ
其中 γ 为预测器影响因子(常数)。
优化后误差动力学:
ε̇ = -[(L + B) + γ(L + B)²]ε + (k₀x₀ - u₀)
结合矩阵特征值性质,该误差系统仍稳定,且因引入预测项加快了收敛速度。
6.参考文献
[1]彭科.带领导者的多智能体系统中的一致性问题研究[D].上海交通大学,2009.DOI: CNKI:CDMD: 1.2010.113233.
[2]刘学良,胥布工.二阶多智能体系统的跟随者-多领导者聚集控制[J].华南理工大学学报:自然科学版, 2013(1):7.DOI:10.3969/j.issn.1000-565X.2013.01.002.
7.算法完整程序工程
OOOOO
OOO
O
关注GZH后输入自动回复码:0026
或输入自动回复码:多智能体

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 9
9 0
0- 0



 已为社区贡献24条内容
已为社区贡献24条内容

所有评论(0)