【机创_①基于HAL库的单个步进电机PWM控制(张大头驱动板)】
文章目录
【机创_①单个步进电机PWM控制】STM32F407 + HAL库
在机械创新比赛或嵌入式项目中,步进电机是最常用的执行器。相比于简单的翻转GPIO口,使用 定时器PWM + 中断计数 的方式控制步进电机,能够极大释放CPU资源,实现更精准、平滑的控制。
本文将详细介绍如何基于 STM32F407ZET6,利用 HAL 库实现对单个步进电机的精准位置(步数)和速度(RPM)控制。
1. 能够实现的功能
本驱动程序旨在实现一种“指哪打哪”的基础控制逻辑,具体功能如下:
- 精准步数控制:指定电机走多少步(对应多少角度),走完自动停止。
- 速度可调:可以直接设定电机的 RPM(转/分钟),程序自动计算定时器参数。
- 方向控制:通过 API 参数直接控制正反转。
- 硬件资源利用:使用 TIM 定时器产生脉冲,仅在脉冲结束时触发中断计数,CPU 占用率极低。
- 解耦设计:驱动代码与主逻辑分离,方便移植和扩展。
2. STM32CubeMX 配置
硬件环境:
- MCU: STM32F407ZET6
- 电机驱动器: 张大头驱动板
- 引脚分配:
- PUL (脉冲): PA2 (TIM5_CH3)
- DIR (方向): PE3
- EN (使能): PE4
配置步骤:
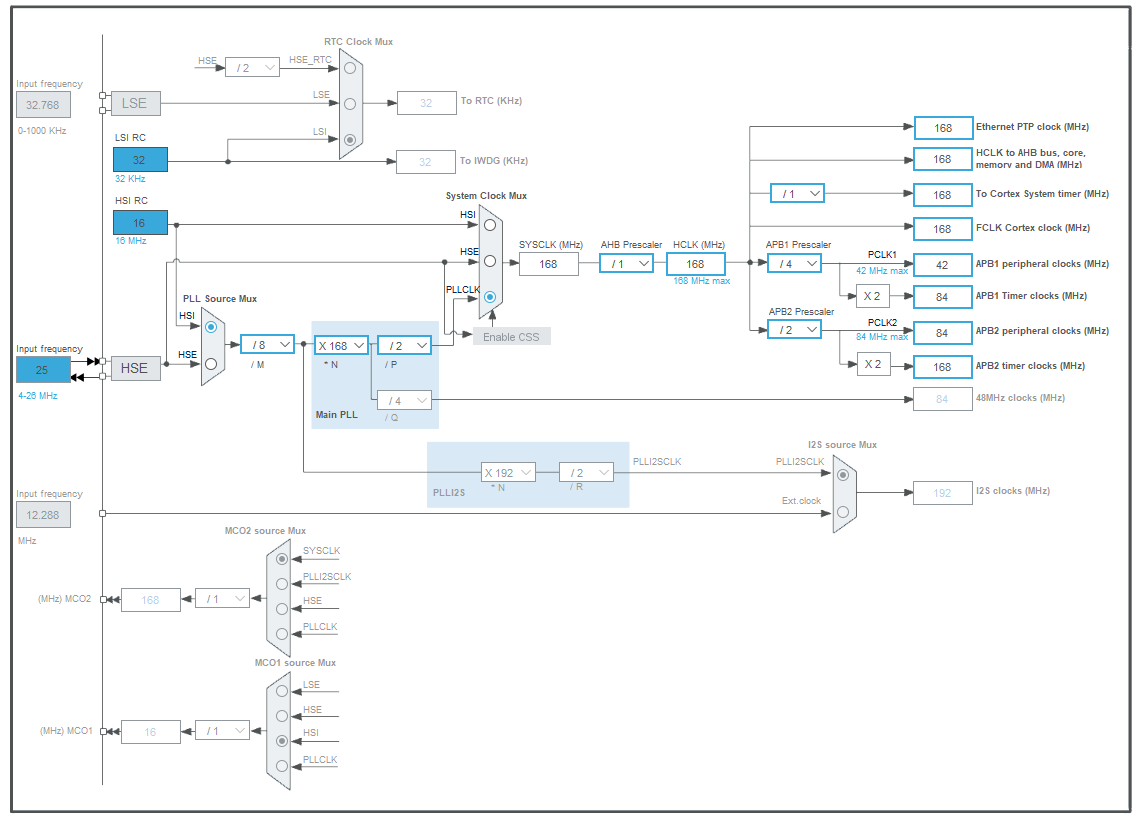
- 时钟树 (RCC):
- 配置外部晶振 (HSE),系统主频设为 168MHz。
- 注意:TIM5 挂载在 APB1 总线上,APB1 Timer Clock 通常为 84MHz。
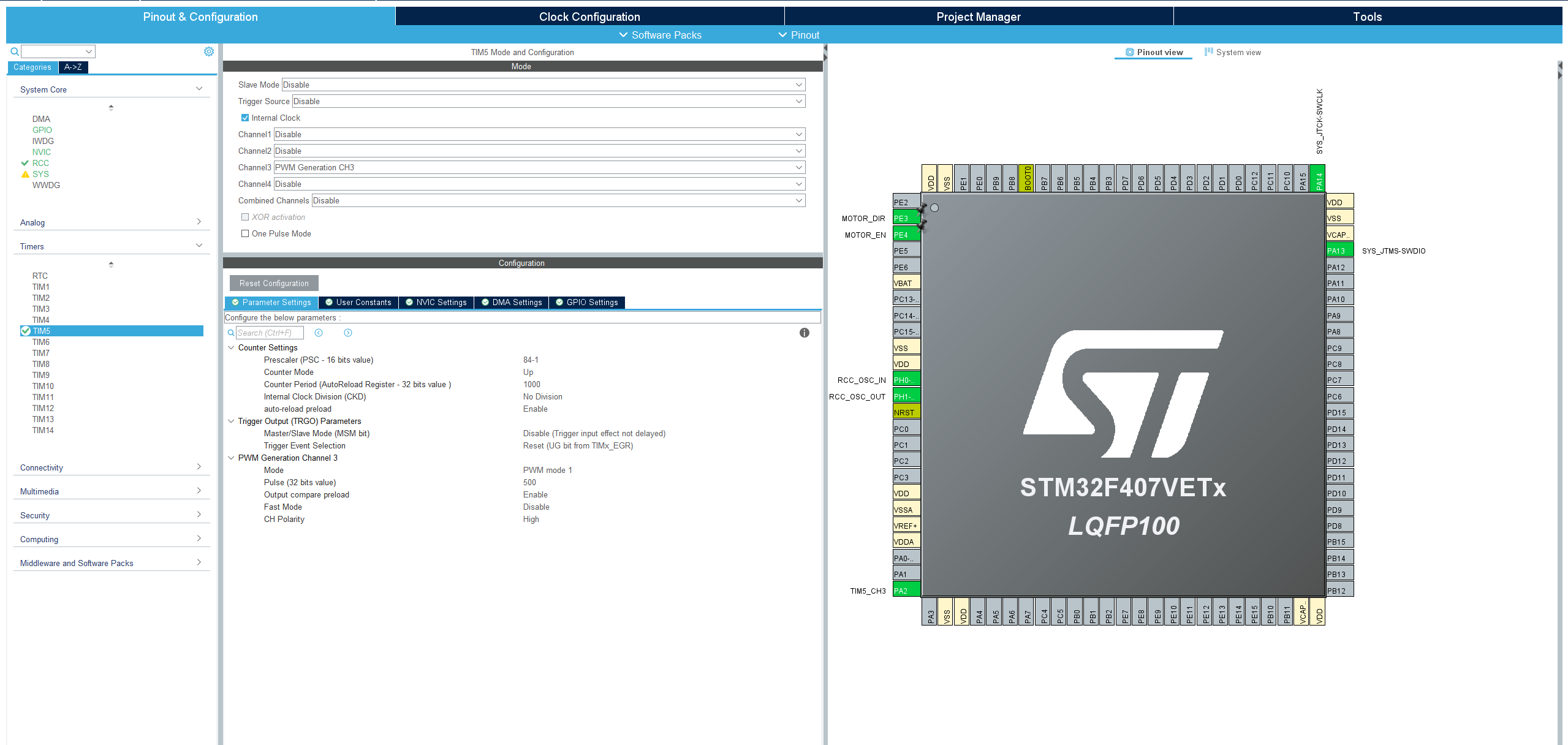
- 定时器配置 (TIM5):
-
找到 TIM5,勾选 Internal Clock。
-
Channel 3 选择 PWM Generation CH3。
-
Parameter Settings (关键):
-
Prescaler (PSC):
83。 -
原理: 这意味着定时器每 1us计数一次,方便后续计算。 -
Counter Period (ARR):
1000(初始值随便填,代码中会动态修改)。 -
Pulse:
500(初始占空比 50%)。 -
Auto-reload preload: Enable。
-
NVIC Settings (重中之重):
-
勾选 TIM5 global interrupt -> Enabled。使用计数器更新中断
如果不开启中断,无法计算步数,电机将停不下来。
为什么
1. 真实机制:定时器的“内循环”
STM32 的定时器(TIM5)内部有两个关键寄存器:
- CNT (Counter, 计数器):当前的计数值(比如 0, 1, 2, …)。
- ARR (Auto-Reload Register, 自动重装载值):设定的终点(比如 999)。
过程演示(假设 ARR = 999):
- 开始:
CNT从 0 开始,每过 1us 加 1。 - 过程:
CNT= 100 … 500 … 900 …- 同时,硬件电路根据
CNT的值控制 PWM 引脚输出高电平或低电平(这是纯硬件行为,不干扰 CPU)。
- 终点(关键时刻):
- 当
CNT增加到 999 (ARR) 时,周期结束。 - 下一刻,
CNT瞬间清零变成 0。 - 就在这一瞬间(溢出/更新事件),定时器硬件内部自动产生一个中断信号 (Update Interrupt)。
结论:
- 一次溢出 = 一个 PWM 周期 = 一次中断。
- 中断是因为“计数器数满了一圈”而触发的,而不是因为“引脚电平变了”而触发的。哪怕你把 PWM 引脚断开,甚至不配置 GPIO 输出,只要定时器在跑,这个中断依然会准时触发。
2. 为什么中断里减 1 就是准确的?
因为严格的同步关系:
- 硬件承诺:我每数完一圈(产生一个完整的 PWM 波形),我就触发一次中断。
- 软件逻辑:既然你触发了中断,就说明你刚刚发完了一个波。那我就把
g_steps_remaining减 1。
图解说明:
-
上图(CNT):锯齿波,代表计数器从 0 涨到 ARR,再掉回 0。
-
中图(PWM Output):根据 CNT 的值,引脚输出高低电平。
-
下图(Interrupt):每次 CNT 掉回 0 的瞬间(也是 PWM 周期结束的瞬间),产生一个尖峰,这就是中断请求。
-
这里用的是:内部计数器溢出触发中断(TIM Update Interrupt)。
中断根本不知道发出了多少波,它只知道:“老板(定时器),我又跑完一圈了!”
然后 CPU(主程序)在中断里拿出小本本(g_steps_remaining)记下来:“好,又跑了一圈,还剩 99 圈。”
- GPIO 配置:
- PE3 (DIR): Output Push Pull, 默认 Low, 命名
MOTOR_DIR。 - PE4 (EN): Output Push Pull, 默认 High (假设高电平脱机/省电), 命名
MOTOR_EN。
3. 完整代码
为了保持工程整洁,我们将电机驱动封装为 motor_driver.c 和 motor_driver.h。
3.1 头文件 (motor_driver.h)
这里使用宏定义管理引脚,方便后续修改硬件连接。
#ifndef __MOTOR_DRIVER_H
#define __MOTOR_DRIVER_H
#include "main.h"
// --- 硬件引脚定义 (修改这里即可换引脚) ---
// 1. 方向引脚 (DIR) -> 现在改为 PE3
#define MOTOR_DIR_PORT GPIOE
#define MOTOR_DIR_PIN GPIO_PIN_3
// 2. 使能引脚 (EN) -> 保持 PE4
#define MOTOR_EN_PORT GPIOE
#define MOTOR_EN_PIN GPIO_PIN_4
// --- 电机参数定义 ---
#define STEPS_PER_REV 3200 // 16细分: 200 * 16
#define TIMER_FREQ 1000000 // 定时器计数频率 1MHz (需CubeMX PSC=83)
// --- 全局变量声明 ---
extern volatile uint32_t g_steps_remaining;
extern volatile uint8_t g_motor_running;
// --- 函数声明 ---
void Motor_Init(void);
void Motor_Move(uint8_t dir, uint32_t steps, float rpm);
void Motor_Stop(void);
#endif
3.2 源文件 (motor_driver.c)
#include "motor_driver.h"
#include "tim.h" // 必须包含以获取 htim5
// --- 全局变量定义 ---
volatile uint32_t g_steps_remaining = 0; // 剩余脉冲数 Global g_ (全局) + steps (步数) + remaining (剩余)
volatile uint8_t g_motor_running = 0; // 运行标志位
// --- 初始化函数 ---
void Motor_Init(void)
{
// 1. 确保PWM停止
HAL_TIM_PWM_Stop(&htim5, TIM_CHANNEL_3);
HAL_TIM_Base_Stop_IT(&htim5);
// 2. 初始化 GPIO 状态
// DIR (PE3): 默认拉低
HAL_GPIO_WritePin(MOTOR_DIR_PORT, MOTOR_DIR_PIN, GPIO_PIN_RESET);
// EN (PE4): 默认拉高 (假设 High = 松开/脱机, Low = 锁死/使能)
// 根据你的驱动器实际逻辑,如果不希望电机发热,初始化时拉高
HAL_GPIO_WritePin(MOTOR_EN_PORT, MOTOR_EN_PIN, GPIO_PIN_SET);
}
// --- 设置速度 (内部函数) ---
static void Motor_SetSpeed(float rpm)
{
if (rpm <= 0) return;
// 1. 计算脉冲频率 (Hz)
// 频率 = (RPM * 3200) / 60
float freq_hz = (rpm * STEPS_PER_REV) / 60.0f;
// 2. 计算 ARR (自动重装载值)
// ARR = (1MHz / 频率) - 1
uint32_t arr = (uint32_t)(TIMER_FREQ / freq_hz) - 1;
// 3. 限制范围 (防止 ARR 太小导致中断溢出卡死)
if (arr < 100) arr = 100;
if (arr > 65535) arr = 65535;
// 4. 更新寄存器 (改变频率)
__HAL_TIM_SET_AUTORELOAD(&htim5, arr);
__HAL_TIM_SET_COMPARE(&htim5, TIM_CHANNEL_3, arr / 2); // 占空比保持 50%
}
// --- 电机移动核心函数 ---
// dir: 0 或 1
// steps: 脉冲数
// rpm: 转速
void Motor_Move(uint8_t dir, uint32_t steps, float rpm)
{
if (g_motor_running) return; // 防止重复调用
g_motor_running = 1;
g_steps_remaining = steps;
// 1. 设置方向 (使用 PE3)
if (dir == 1)
HAL_GPIO_WritePin(MOTOR_DIR_PORT, MOTOR_DIR_PIN, GPIO_PIN_SET);
else
HAL_GPIO_WritePin(MOTOR_DIR_PORT, MOTOR_DIR_PIN, GPIO_PIN_RESET);
// 2. 使能驱动器 (拉低 PE4,电机上电锁死)
HAL_GPIO_WritePin(MOTOR_EN_PORT, MOTOR_EN_PIN, GPIO_PIN_RESET);
// 3. 设置速度
Motor_SetSpeed(rpm);
// 4. 清除计数器和中断标志 (关键步骤!)
__HAL_TIM_SET_COUNTER(&htim5, 0);
__HAL_TIM_CLEAR_IT(&htim5, TIM_IT_UPDATE);
// 5. 开启中断和PWM
HAL_TIM_Base_Start_IT(&htim5); // 开启计数中断
HAL_TIM_PWM_Start(&htim5, TIM_CHANNEL_3); // 开启PWM发波
}
// --- 停止电机 ---
void Motor_Stop(void)
{
HAL_TIM_PWM_Stop(&htim5, TIM_CHANNEL_3);
HAL_TIM_Base_Stop_IT(&htim5);
g_motor_running = 0;
// 停止后保持锁定 (保持 EN 为低电平)
// 如果你想停止后电机省电且无力,改为 GPIO_PIN_SET
HAL_GPIO_WritePin(MOTOR_EN_PORT, MOTOR_EN_PIN, GPIO_PIN_RESET);
}
// --- 中断回调函数 ---
// 放在这里,HAL库会自动调用
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == TIM5) // 确认是 TIM5
{
if (g_motor_running)
{
if (g_steps_remaining > 0)
{
g_steps_remaining--; // 步数减 1
}
else
{
Motor_Stop(); // 步数走完,停止
}
}
}
}
【CPU 软件执行流】 【定时器 硬件时间轴】
| |
| |
1. 进入 Motor_Move 函数 | (定时器处于停止状态)
| |
| (配置方向、使能...) |
| |
| |
2. 调用 HAL_TIM_Base_Start_IT -------------------> | 动作:开启“报警开关”(中断使能)
| | (注意:此时 CNT 还是 0,没开始跑)
| |
| |
3. 调用 HAL_TIM_PWM_Start -----------------------> | 动作:开启计数器
| | 状态:CNT 开始狂奔 (0 -> 1 -> 2...)
| |
4. Motor_Move 函数结束,return |
| |
5. CPU 回到 main 函数 |
(执行 while 循环或处理串口) |
| |
| | 状态:CNT 继续增加 (... -> 500 -> ...)
| |
| |
| | 状态:CNT 继续增加 (... -> 998 -> 999)
| |
| | 动作:CNT 溢出 (到达 ARR)!
| <----------【中断触发!】-------------- | 信号:硬件产生 Update Event
| | 状态:CNT 瞬间归零,开始下一圈 (0 -> 1...)
| |
6. CPU 暂停手头工作,瞬移进中断 |
| |
7. 执行 HAL_TIM_PeriodElapsedCallback |
(g_steps_remaining 减 1) |
| |
8. 中断结束,CPU 跳回 main |
| |
v v
(继续往下走) (继续跑下一圈)
3.3 主程序调用 (main.c)
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2026 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "motor_driver.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM5_Init();
/* USER CODE BEGIN 2 */
// 1. 初始化电机 (拉高 EN,停止 PWM)
Motor_Init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
// --- 动作 1: 正转 ---
// 方向: 1, 步数: 3200 (1圈), 速度: 300 RPM
Motor_Move(1, 3200, 300.0f);
// 等待直到电机停止
while(g_motor_running)
{
// 这里可以干别的事,比如检测限位开关
}
HAL_Delay(500); // 停 0.5 秒
// --- 动作 2: 反转 ---
// 方向: 0, 步数: 6400 (2圈), 速度: 600 RPM
Motor_Move(0, 6400, 600.0f);
while(g_motor_running);
HAL_Delay(500);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 168;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
4. 代码思路和核心讲解
这是一个非常好的问题!理解代码背后的逻辑比单纯复制粘贴重要得多。我们正在做的是**“裸机驱动开发”(Bare-metal Driver Development),核心思想是用软件逻辑去驾驭硬件资源**。
本节将从整体架构设计、关键变量设计、函数功能拆解、以及“为什么这么写”(避坑指南)这四个维度为你详细讲解。
4.1 整体架构设计思路
我们面对的任务是:让单片机精准地控制电机走指定的步数,并且速度可调。
为了实现这个目标,我选择了 “PWM + 中断计数” 的模式:
- PWM (脉冲宽度调制): 负责“发波”。通过调整 PWM 的频率,就能控制电机的速度。这部分由硬件定时器(TIM5)全自动完成,不占 CPU。
- 中断 (Interrupt): 负责“数数”。每发一个波,硬件就会通知一次 CPU(产生中断),我们在中断里做一个减法,减到 0 就关掉 PWM。
为什么不直接用 HAL_Delay 翻转 GPIO?
- 低效:
delay会让 CPU 死等,做不了别的事(比如处理串口、读传感器)。 - 不准:CPU 被其他中断打断时,脉冲宽度会变,电机声音会很难听,甚至丢步。
4.2 关键变量设计 (全局变量)
代码里定义了两个带有 volatile 关键字的全局变量,这是驱动的灵魂所在。
volatile uint32_t g_steps_remaining = 0; // 剩余脉冲数
volatile uint8_t g_motor_running = 0; // 运行标志位
1. 为什么要加 volatile?
这是一个嵌入式面试必考题,也是新手最容易出 Bug 的地方。
- 场景:
g_steps_remaining这个变量,主程序(Motor_Move)在写它,中断程序(HAL_TIM_PeriodElapsedCallback)在读和改它。 - 问题:编译器(Keil/GCC)很聪明,它看主程序里写了
steps = 1000,然后后面只是在空转等待,它可能觉得“哎?没人动这个变量啊”,就直接把它优化成常数了,根本不去检查内存里它是不是变了。 - 解决:
volatile告诉编译器:“老实点!这个变量随时可能被(中断)偷偷修改,每次用它都必须去内存里重新读取,不要擅自优化!”
2. g_motor_running 的作用是什么?
它起到了 “互斥锁” 和 “状态指示灯” 的作用。
- 互斥:当电机正在转的时候(
g_motor_running == 1),如果主程序又调用了一次Motor_Move,函数开头直接return,防止新的指令打断正在进行的动作,避免逻辑混乱。 - 指示:主程序可以通过
while(g_motor_running);来阻塞等待,直到电机停下再执行下一步。
4.3 函数功能深度拆解
1. Motor_Init (初始化)
- 思路:上电后的第一件事是确立初始状态。
- 关键点:
HAL_TIM_PWM_Stop: 先把发波关掉,防止一上电电机就乱转。HAL_GPIO_WritePin(..., GPIO_PIN_SET): 把 EN 拉高。大多数驱动器(如 TB6600)EN 悬空或高电平时是脱机状态(电机没劲,手能转动)。这样可以防止电机在没工作时发热,也防止上电瞬间电机“咯噔”一下抖动。
2. Motor_SetSpeed (计算 ARR)
static void Motor_SetSpeed(float rpm) { ... }
- static 的含义:这个函数只在
.c文件内部使用,不给外部(main.c)调用,这叫封装。 - 数学逻辑:
- 你给了我 RPM(每分钟转多少圈)。
- 我知道电机一圈要 3200 步。
- 所以我算出每秒要多少个脉冲(频率
freq_hz)。 - 我知道定时器 1 秒钟数 1,000,000 次(因为我们在 CubeMX 里设了 PSC 让它变成 1MHz)。
-
核心公式:
ARR = (1MHz / 频率) - 1。 -
比如你要 1kHz 的频率,即 1ms 一个波。定时器数 1000 次就是 1ms。所以 ARR = 999。
-
防呆设计:
if (arr < 100) arr = 100;。如果用户设了个 100000 RPM 的天价速度,ARR 会变得极小(比如 5),定时器中断会疯狂触发(每几微秒一次),直接把 CPU 累死,主程序就跑不动了。
3. Motor_Move (核心发令官)
这是你调用的主要函数,它的执行顺序非常讲究:
- 设置方向 & 使能:先把路指好(DIR),再给油门(EN 拉低上电)。
- 设置速度:算好 ARR。
- 【最关键的一步】清除计数器:
__HAL_TIM_SET_COUNTER(&htim5, 0);
__HAL_TIM_CLEAR_IT(&htim5, TIM_IT_UPDATE);
- 为什么要清零? 假设上次电机跑完,定时器可能停在了
CNT = 500的位置。你这次启动,ARR 设为 800。如果不清零,它从 500 数到 800 只需要一点点时间,导致第一个脉冲特别短,电机可能会抖一下。 - 为什么要清标志位? 开启中断的瞬间,如果寄存器里残留了上次的中断标志,CPU 会立刻进一次中断,导致步数多算了一步(比如让你走 100 步,实际只走了 99 步脉冲就停了,因为第 1 次是误触发)。
- 启动:先开中断(开始计数),再开 PWM(开始发波)。
4. HAL_TIM_PeriodElapsedCallback (幕后记账员)
这是中断回调函数,它是被动触发的。
- 逻辑:
每当 PWM 发出一个波(定时器溢出),CPU 就会暂停手头的工作,跳到这里。
我们看看g_steps_remaining还有没有? - 有:减 1,然后立马退出中断,回去干活。
- 没有(减到0了):说明步数走够了。调用
Motor_Stop关掉 PWM 和中断。
4.4 为什么要这样写?(总结)
- 解耦 (Decoupling):
我们将电机驱动逻辑(motor_driver)和业务逻辑(main)分开了。motor_driver.c只负责“怎么转”,main.c只负责“什么时候转、转多少”。如果不分开,代码全堆在 main 里会乱成一锅粥。 - 效率 (Efficiency):
利用 STM32 的硬件资源(TIM5)去生成脉冲,CPU 只需要在脉冲结束的瞬间花几十个时钟周期去减个数。即使电机转速很快,CPU 依然有 99% 的空闲时间去处理你的串口通信、传感器数据等。 - 可移植性 (Portability):
如果你下次换了 F103 或者 H7 芯片,或者换了引脚,你只需要修改motor_driver.h里的宏定义,逻辑代码几乎一行都不用动。
一句话总结:
这段代码是用最少的 CPU 资源,通过硬件定时器实现精准脉冲控制的标准工业级写法。理解了它,你就理解了单片机驱动开发的精髓。
5. 补充知识点:深入理解 volatile 关键字
在 motor_driver.c 中,你可能注意到了这行代码:
volatile uint32_t g_steps_remaining = 0;
很多初学者会忽略这个 volatile(易变的),觉得“不加好像也能编译通过”。但实际上,如果不加它,你的程序可能会陷入死循环。
为了彻底理解它,我们需要从 生活类比 和 底层原理 两个维度来看。
5.1 生活类比:“黑板”与“笔记本”
想象一下,单片机的主程序(CPU)正在考试,它的任务是盯着教室前面的 黑板(内存/SRAM)。
- 规则:如果黑板上写着“跑”,你就一直跑;如果老师(中断)把字改成“停”,你就停下来。
情况一:不加 volatile(编译器自作聪明)
编译器(你的大脑)非常聪明但也非常懒。它发现:“一直在跑步,黑板离我太远了,抬头看好累。”
于是,它把黑板上的“跑”字抄到了手边的 笔记本(CPU寄存器/缓存) 上。接下来的时间里,它只看笔记本,不再抬头看黑板。
- 突发:老师(中断)突然走上讲台,把黑板上的字改成了“停”。
- 后果:因为你一直死盯着笔记本(上面还是写的“跑”),你根本不知道黑板变了。你会一直跑下去,程序卡死。
情况二:加上 volatile(强制查岗)volatile 的意思就是告诉编译器:
“注意!黑板上的字随时可能被那个‘疯子老师’(中断)改掉!你千万别偷懒抄在笔记本上!每次要确认状态,必须亲自抬头去看黑板!”
这样,无论中断什么时候修改了内存,主程序下一次循环时,一定会从内存读取最新值,程序就能正常退出了。
5.2 硬核原理:寄存器是“复印件”不是“映射”
从计算机体系结构的角度来看,CPU 计算时,数据必须从 内存(RAM) 搬运到 寄存器(Register) 才能处理。
这里有两个核心机制导致了“不加 volatile 就会出错”:
1. 寄存器只是“复印件”
当你执行判断 while(flag == 1) 时,如果没有 volatile,编译器会进行优化:
- 加载:先把 RAM 里的
flag(值=1) 读到寄存器R0中。 - 死循环:以后只检查
R0的值。 - 脱节:此时,RAM 里的
flag和寄存器R0在物理上是断开的。就算中断把 RAM 里的flag改成了 0,R0依然是 1。
2. 中断的“现场保护”机制
你可能会问:“中断发生时,为什么不顺便把寄存器也改了?” 答案是:绝对不行,CPU 必须保护现场。
- 中断前:主程序正在用寄存器
R0(值为1)。 - 中断发生:CPU 做的第一件事是 压栈(Push)。它把
R0的当前值(1)保存到堆栈里“存档”。 - 执行中断:中断代码修改了 内存地址 里的
flag为 0。注意,它改的是内存,不是刚才存档的R0。 - 中断结束:CPU 执行 出栈(Pop)。它把刚才存档的旧值(1)强制恢复 回
R0寄存器。
结果:主程序醒来后,看了一眼 R0,发现还是 1。它根本不知道内存已经被改了。
5.3 结论
在单片机开发中,只要满足以下条件,变量必须加 volatile:
- 变量在中断(ISR)中被修改,在主程序中被读取。
- 变量指向硬件寄存器(如状态寄存器),数值由硬件自动改变。
- 多线程(RTOS)共享的全局变量。
所以在本驱动中,g_steps_remaining 和 g_motor_running 都必须加上 volatile,这是保证代码逻辑正确的基石。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 11
11 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)