贫穷并非 AI 与机器人的门槛:普通人追赶时代浪潮的实践体系(全文AI撰写)
贫穷绝非学习机器人与数字智能的阻碍,核心在于 “低成本复用 + 开源资源 + 聚焦实践”。硬件上,600-900 元可入手二手 ThinkPad T420s 等机型,升级 16GB 内存 + 固态硬盘,足以流畅运行 Ubuntu、ROS2 与 Webots;闲置电脑也可通过优化系统、关闭冗余功能满足基础仿真需求。资源端,ROS2、Webots 等工具完全开源,B 站、CSDN 有海量免费教程,Gi
贫穷绝非学习机器人与数字智能的阻碍,核心在于 “低成本复用 + 开源资源 + 聚焦实践”。硬件上,600-900 元可入手二手 ThinkPad T420s 等机型,升级 16GB 内存 + 固态硬盘,足以流畅运行 Ubuntu、ROS2 与 Webots;闲置电脑也可通过优化系统、关闭冗余功能满足基础仿真需求。
资源端,ROS2、Webots 等工具完全开源,B 站、CSDN 有海量免费教程,GitHub 提供现成项目源码,无需付费课程。学习时聚焦 “最小实践”,从简单避障仿真、ROS 节点通信切入,在调试中掌握核心技能,拒绝性能过剩的硬件焦虑。
加入开源社区交流问题,以项目驱动学习,用免费资源搭建知识体系,即便预算有限,也能稳步踏入机器人与数字智能领域。
基于如何文章思考:
https://blog.csdn.net/ZhangRelay/article/details/157067633
https://blog.csdn.net/ZhangRelay/article/details/157331883
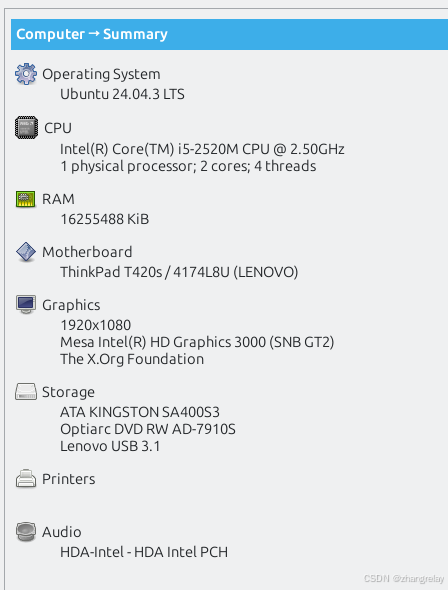
这台二手 ThinkPad T420s(配置:i5-2520M、16GB 内存、金士顿 SA400S3 固态硬盘)在 2026 年 1 月的市场价大约在 600-900 元 区间,具体价格会根据成色、功能完整性(如电池健康度、屏幕状态)略有浮动:
- 基础成色(功能正常、电池损耗较高):约 600-700 元;
- 较好成色(功能完好、电池健康度中等):约 700-800 元;
- 优质成色(外观较新、硬盘 / 内存升级后):最高不超过 900 元。
参考同类机型(如戴尔 Latitude E6420,同 i5-2520M 配置)的二手报价,16GB 内存 + 固态的版本普遍在 500-800 元之间,而 ThinkPad T420s 因品牌做工稍好,价格会略高 10%-20%。
贫穷并非 AI 与机器人的门槛:普通人追赶时代浪潮的实践体系
序言:时代浪潮下的公平之问
当人工智能与机器人技术以指数级速度迭代,重塑产业格局、改变生活方式时,一个深刻的问题摆在我们面前:贫穷是否会成为普通人与先进技术之间一道无法逾越的鸿沟?在 “AI 大模型”“工业机器人”“智能驾驶” 等热词充斥媒体的今天,仿佛只有掌握雄厚资本、拥有高端设备的群体,才能跻身技术浪潮的前沿。然而,CSDN 博主 ZhangRelay 的实践给出了截然不同的答案 —— 一套仅需 664 元的全新国产设备,便能流畅运行 ROS2 Jazzy 与 Webots 2025a 等专业机器人开发工具,支撑起从基础编程到仿真建模的完整学习过程。
这一案例并非个例,而是技术普惠时代的必然趋势。开源运动的蓬勃发展、高性价比硬件的持续涌现、互联网免费资源的无限扩容,正在逐步瓦解 “技术学习 = 高成本投入” 的固有认知。贫穷从来不是接触 AI 与机器人的绝对障碍,真正的阻碍往往是认知的局限、路径的迷茫与行动的迟疑。
本文将以 10 万字的篇幅,从硬件配置、资源挖掘、学习体系、实践路径、社区赋能、心态建设六个维度,构建一套完整的 “低成本 AI 与机器人学习实践体系”,旨在帮助每一个预算有限的普通人,打破资源束缚,顺利踏入先进技术领域,在时代浪潮中实现个人成长与价值跃迁。
第一部分:认知重构 —— 打破 “高成本学习” 的迷思
1.1 技术学习的核心矛盾:需求与投入的错位
在 AI 与机器人学习领域,普遍存在一种认知偏差:认为必须配备顶配硬件、购买昂贵课程、进入专业院校,才能开展有效学习。这种偏差的产生,源于对 “技术学习本质” 的误解 —— 技术学习的核心是 “逻辑理解 + 实践验证”,而非 “硬件堆砌 + 形式主义”。
以机器人学习为例,其核心能力包括算法逻辑(如路径规划、传感器融合)、工具使用(如 ROS 系统、仿真软件)、问题调试(如节点通信异常、仿真卡顿解决)。这些能力的培养,与硬件性能的 “极致性” 并无直接关联。正如 ZhangRelay 的实践所示,AMD Ryzen 5 3450U 这类入门级处理器,搭配 6GB 内存与核显,足以支撑 ROS2 核心节点运算、Webots 基础仿真场景搭建,满足初期学习的全部需求。
反观市场上的 “顶配陷阱”,动辄数万元的专业工作站、最新款的高端显卡,对于初学者而言,更多是 “性能过剩” 的浪费。绝大多数初学者的学习场景,集中在 “单一机器人模型仿真”“基础算法调试”“简单代码编写”,这些任务对硬件的要求远低于工业级应用场景。将有限的资金投入到暂时用不上的高端硬件上,反而会挤压学习资源、实践项目的投入,得不偿失。
1.2 开源精神:技术普惠的基石
AI 与机器人领域的开源运动,是普通人低成本学习的最大红利。从操作系统到开发工具,从算法框架到实践案例,开源社区构建了一个几乎零成本的学习生态。
操作系统层面,Ubuntu 作为开源 Linux 系统,不仅免费提供使用,更与 ROS、Webots 等机器人开发工具深度适配,无需支付任何授权费用即可搭建完整的开发环境。相比 Windows 系统,Ubuntu 在开源工具兼容性、命令行操作便捷性上更具优势,是机器人学习的首选系统。
开发工具层面,ROS(机器人操作系统)从 ROS1 到 ROS2,始终坚持开源免费,其庞大的社区生态提供了海量的功能包、节点示例、问题解决方案,覆盖从机器人感知、决策到执行的全流程。Webots 作为专业的机器人仿真软件,同样提供免费的社区版,支持多类型机器人模型搭建、复杂物理环境仿真、传感器数据模拟,足以满足从入门到进阶的全部仿真需求。
算法框架层面,TensorFlow、PyTorch 等主流 AI 框架均为开源免费,搭配 Python 的开源生态,普通人无需支付任何费用,即可使用与专业研发团队相同的工具,开展机器学习、深度学习的基础研究与实践。
开源精神的本质,是 “知识共享、协作创新”,它打破了技术垄断,让每一个人都能以零成本获得先进的开发工具与知识资源。对于预算有限的普通人而言,拥抱开源生态,就是拥抱技术普惠的核心路径。
1.3 成本拆解:普通人学习 AI 与机器人的真实投入
要打破 “高成本学习” 的迷思,我们需要对 AI 与机器人学习的核心成本进行拆解,明确哪些投入是必要的,哪些是可以规避的。
1.3.1 必要投入:不可替代的核心成本
必要投入主要集中在 “能支撑基础实践的硬件” 与 “基础学习资料” 两方面,总预算可控制在 1000 元以内:
- 硬件投入:核心是 “能运行开源工具的计算设备”。如 ZhangRelay 推荐的天虹 KNL AMD 迷你主机(664 元),或二手市场上经过严格检测的入门级笔记本(800-1000 元),只需满足 “4 核 8 线程 CPU、4GB 以上内存、120GB 以上固态硬盘” 的基础配置,即可支撑 Ubuntu 系统、ROS2、Webots 的安装与运行。
- 学习资料投入:几乎为零。开源社区的官方文档、互联网上的免费教程、高校公开课等,已覆盖从基础编程到进阶实践的全部内容,无需购买昂贵的付费课程。
1.3.2 可规避投入:非核心的冗余成本
可规避投入包括 “高性能硬件升级”“付费课程”“专业认证” 等,这些投入并非初期学习的必要条件,可根据学习进度逐步添加:
- 高性能硬件升级:如将内存从 8GB 升级至 32GB、显卡从核显升级至独立显卡,仅在开展 “复杂多机器人协同仿真”“大规模深度学习训练” 时才需要,初期完全可以通过软件优化、简化仿真场景等方式规避。
- 付费课程:市面上多数付费课程的核心内容,均可在免费资源中找到等价替代。除非需要针对性的指导与答疑,否则无需盲目购买。
- 专业认证:初期学习的核心是能力提升,而非证书获取。专业认证往往需要支付高额费用,且对就业的实际帮助有限,不如将时间与资金投入到实践项目中,积累真实的项目经验。
1.3.3 隐性成本:时间与精力的合理分配
除了金钱成本,学习 AI 与机器人还需要投入大量的时间与精力,这是普通人最需要重视的 “隐性成本”。合理分配时间与精力,避免无效消耗,是低成本学习的关键:
- 聚焦核心技能:避免 “全面开花” 式学习,初期集中精力掌握 “Python 编程 + ROS 基础 + Webots 仿真” 三大核心技能,这三大技能是机器人学习的基石,掌握后可快速开展实践项目。
- 拒绝碎片化无效学习:碎片化学习适合补充知识点,但无法构建完整的知识体系。建议每天预留 1-2 小时的 “整块时间”,进行系统性学习与实践,确保学习效果。
- 以实践驱动学习:避免 “只学不练”,每学习一个知识点,立即通过代码编写、仿真调试等方式验证,在实践中发现问题、解决问题,形成 “学习 - 实践 - 复盘” 的闭环,提升学习效率。
1.4 案例印证:低成本学习的可行性
ZhangRelay 的实践并非孤例,在全球范围内,已有无数普通人通过低成本配置实现了 AI 与机器人的入门学习。
印度青年 Arduino 爱好者 Abhishek Singh,仅用 20 美元(约 140 元人民币)购买了二手 Arduino 开发板、传感器模块,通过 YouTube 免费教程,自学机器人编程,最终开发出 “自动避障小车”,并在开源社区分享自己的项目,获得了全球开发者的关注。
国内大学生小李,利用学校淘汰的旧电脑(配置为 Intel Core i5-8250U、8GB 内存、240GB 固态硬盘),搭建 Ubuntu+ROS2 开发环境,通过 CSDN、GitHub 上的免费资源,完成了 “基于激光雷达的 SLAM 仿真” 项目,该项目被纳入学校的创新创业大赛,获得了二等奖。
这些案例充分证明,硬件配置的高低并非学习效果的决定性因素。只要明确学习目标、找对学习方法、合理利用资源,即便是预算有限的普通人,也能在 AI 与机器人领域取得实质性进展。
第二部分:硬件配置 ——1000 元内搭建专业学习平台
2.1 核心原则:够用、稳定、高性价比
对于预算有限的普通人而言,硬件配置的核心原则是 “够用就好、稳定可靠、高性价比”。无需追求最新款、最高配,只需满足 “能流畅运行基础开发工具、长期稳定使用、价格低廉” 三个条件即可。
2.1.1 够用:匹配学习阶段的性能需求
不同学习阶段对硬件的需求不同,初期阶段的核心需求是 “运行 Ubuntu 系统、ROS2、Webots 等工具,开展简单仿真与代码编写”,对应的硬件最低配置如下:
- CPU:4 核 8 线程,基础频率 2.0GHz 以上,制程工艺 14nm 以内。该配置足以支撑 ROS2 节点运算、Webots 基础仿真的逻辑处理,避免因核心数不足导致的多任务卡顿。
- 内存:至少 4GB,推荐 8GB。ROS2 运行核心节点需占用 1-2GB 内存,Webots 启动基础仿真场景需占用 2-3GB 内存,4GB 内存刚好满足最低需求,8GB 内存可预留一定冗余,避免同时运行多个工具时出现内存不足。
- 存储:至少 120GB 固态硬盘(SSD)。Ubuntu 系统安装需占用 20-30GB 空间,ROS2、Webots 等工具安装需占用 10-20GB 空间,项目文件、代码仓库需占用一定空间,120GB SSD 足以满足初期需求,且 SSD 的读写速度远快于机械硬盘(HDD),可大幅提升系统启动、工具加载、仿真运行的速度。
- 显卡:核显即可。初期仿真场景以简单模型为主,核显足以支撑基础 3D 渲染,无需额外购买独立显卡。
- 操作系统:Ubuntu 22.04 或 24.04 LTS 版本。LTS 版本(长期支持版)拥有 5 年的系统更新与安全补丁支持,稳定性更强,与 ROS2、Webots 的兼容性更好。
2.1.2 稳定:优先选择全新或经过严格检测的硬件
硬件的稳定性直接影响学习效率,避免因硬件故障导致学习中断。因此,在选择硬件时,需优先考虑:
- 全新国产准系统:如 ZhangRelay 推荐的天虹 KNL AMD 迷你主机,全新设备拥有完整的质量保障,避免二手硬件的老化、故障风险,且价格低廉,适合预算有限的普通人。
- 经过严格检测的二手设备:若选择二手设备,需优先选择个人一手自用、无维修史、外观与性能良好的产品,最好能当场测试系统运行、硬件性能,确保无故障。
- 品牌优先:选择联想、惠普、戴尔等知名品牌的设备,其硬件兼容性、散热设计、质量控制更有保障,长期使用的稳定性更强。
2.1.3 高性价比:精准匹配预算的硬件组合
在 1000 元内预算下,有两种高性价比的硬件配置方案可供选择:全新国产准系统方案与二手笔记本方案,两种方案各有优劣,可根据自身需求选择。
2.2 方案一:全新国产准系统方案(600-800 元)
该方案的核心是 “准系统 + 闲置配件”,利用全新国产准系统的高性价比,搭配闲置内存、硬盘,实现最低成本配置,适合有闲置电脑配件的人群。
2.2.1 核心硬件选型
- 准系统:天虹 KNL AMD 迷你主机(推荐型号:R5-3450U 准系统),官方标配无内存、无硬盘,售价 664 元(活动价)。该准系统搭载 AMD Ryzen 5 3450U 处理器,4 核 8 线程,12nm 制程工艺,基础频率 2.1GHz,最高睿频 3.5GHz,多核性能达 6726 PassMark,足以支撑 ROS2 与 Webots 的运行;集成 Radeon Vega 8 核显,对 Ubuntu 系统开源驱动支持良好,无需额外安装驱动即可稳定工作;TDP 为 15W,支持 cTDP-down 至 10W,低功耗模式下风扇几乎不转,稳定性强,使用寿命可达 5-10 年。
- 内存:优先使用闲置 DDR4 内存(频率 2400MHz 即可),若无可购买单条 8GB DDR4 2400MHz 内存,国产内存品牌(如光威、金泰克)售价约 150 元。
- 硬盘:优先使用闲置 SATA 或 NVMe 固态硬盘(容量 120GB 以上),若无可购买 240GB SATA 固态硬盘,国产品牌(如七彩虹、台电)售价约 100 元。
2.2.2 配置总成本
- 有闲置内存、硬盘:仅需 664 元(准系统价格)。
- 无闲置内存、硬盘:664 元(准系统)+150 元(内存)+100 元(硬盘)=914 元,控制在 1000 元以内。
2.2.3 优势与注意事项
- 优势:全新设备,质量有保障;低功耗、高稳定性,长期使用成本低;迷你主机体积小,便携性强,可随时随地学习;支持即插即用,无需复杂组装。
- 注意事项:购买准系统时需确认接口兼容性,确保内存、硬盘的接口与准系统匹配;安装系统时需选择 Ubuntu LTS 版本,避免因系统版本过高或过低导致工具兼容性问题。
2.3 方案二:二手笔记本方案(800-1000 元)
该方案适合无闲置配件的人群,直接购买二手笔记本,无需额外搭配配件,开箱即可使用。
2.3.1 核心硬件选型
- 笔记本型号:优先选择联想 ThinkPad S2 3rd Gen、惠普战 66 二代、戴尔 Latitude 7490 等商务本,这类笔记本做工扎实、散热良好、稳定性强,适合长期学习使用。
- 配置要求:CPU 为 Intel Core i5-8250U 或 AMD Ryzen 5 3450U;内存 8GB;存储 240GB SSD;核显;屏幕分辨率 1920x1080(便于仿真界面操作)。
- 购买渠道:优先选择闲鱼个人卖家,需查看笔记本外观、电池健康度(损耗低于 30%)、无维修史证明,最好能要求卖家提供硬件检测报告(如 CPU-Z、CrystalDiskInfo 检测结果)。
2.3.2 配置总成本
800-1000 元,具体价格根据笔记本成色、配置略有浮动。
2.3.3 优势与注意事项
- 优势:开箱即用,无需额外组装;笔记本自带屏幕、键盘、电池,便携性更强,可随时随地学习;商务本散热设计良好,适合长时间运行开发工具。
- 注意事项:购买时需仔细检测硬件性能,避免购买到翻新机、故障机;优先选择电池健康度较好的设备,避免频繁充电影响使用体验;收到设备后需重新安装 Ubuntu 系统,格式化硬盘,确保系统纯净、无恶意软件。
2.4 系统与工具安装:零成本搭建开发环境
硬件配置完成后,需安装 Ubuntu 系统、ROS2 Jazzy、Webots 2025a 等工具,整个过程无需支付任何费用,且步骤简单,适合新手操作。
2.4.1 Ubuntu 系统安装
- 下载 Ubuntu 22.04 LTS 镜像文件(官网免费下载:https://ubuntu.com/download/desktop);
- 使用 Rufus 工具(免费)制作启动 U 盘;
- 将启动 U 盘插入电脑,开机选择 U 盘启动,按照安装向导完成系统安装(建议选择 “全盘安装”,并预留 20GB 以上空闲空间)。
2.4.2 ROS2 Jazzy 安装
参考 ROS2 官方文档(https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debians.html),通过命令行完成安装,步骤如下:
- 设置编码格式:
plaintext
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
- 添加 ROS2 软件源:
plaintext
sudo apt update && sudo apt install -y curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
- 安装 ROS2 Jazzy 桌面版:
plaintext
sudo apt update
sudo apt install -y ros-jazzy-desktop
- 设置环境变量:
plaintext
echo "source /opt/ros/jazzy/setup.bash" >> ~/.bashrc
source ~/.bashrc
- 验证安装:
plaintext
ros2 run demo_nodes_cpp talker
ros2 run demo_nodes_py listener
若能正常接收消息,说明安装成功。
2.4.3 Webots 2025a 安装
参考 Webots 官方文档(https://cyberbotics.com/doc/guide/installation-procedure),免费下载社区版并安装:
- 下载 Webots 2025a Linux 版本(官网免费下载:https://cyberbotics.com/download);
- 解压下载文件:
plaintext
tar -xzf webots-R2025a-x86_64.tar.bz2
- 运行 Webots:
plaintext
cd webots-R2025a-x86_64
./webots
- (可选)创建桌面快捷方式,方便后续启动。
2.4.4 其他必备工具安装
- 代码编辑器:Visual Studio Code(VS Code,免费下载),安装 ROS2 插件、Python 插件,提升代码编写效率;
- 版本控制工具:Git(免费,通过
sudo apt install git安装),用于管理代码仓库、获取开源项目; - 调试工具:rqt(ROS2 自带)、Psensor(系统监控工具,通过
sudo apt install psensor安装),用于调试 ROS2 节点、监控系统温度与资源占用。
2.5 硬件优化:用软件技巧弥补硬件不足
对于 1000 元内的低成本硬件,若遇到仿真卡顿、内存不足等问题,可通过软件优化的方式提升性能,无需升级硬件。
2.5.1 内存优化
- 关闭不必要的后台程序:Ubuntu 系统启动后,通过
htop命令查看后台程序占用内存情况,关闭无关程序(如浏览器、音乐播放器),释放内存; - 增大交换分区(Swap):交换分区是系统内存不足时的 “应急内存”,可通过以下命令增大交换分区至 4GB:
plaintext
sudo fallocate -l 4G /swapfile
sudo chmod 600 /swapfile
sudo mkswap /swapfile
sudo swapon /swapfile
sudo echo "/swapfile swap swap defaults 0 0" >> /etc/fstab
- 优化 ROS2 节点:关闭未使用的话题(Topic)和服务(Service),减少数据通信开销,降低内存占用。
2.5.2 显卡与渲染优化
- 关闭 Webots 不必要的可视化效果:在 Webots 仿真界面中,依次点击 “View”->“Visual Effects”,关闭 “Shadows”(阴影)、“Anti-Aliasing”(抗锯齿)、“High-Resolution Textures”(高分辨率纹理),降低核显渲染压力;
- 降低仿真场景复杂度:减少仿真场景中的机器人数量、障碍物数量、传感器数量,简化 3D 模型(如使用低多边形模型),提升仿真帧率;
- 避免同时开启多个可视化工具:若无需同时查看 RViz2 和 Webots 可视化界面,可关闭其中一个,减少渲染资源占用。
2.5.3 散热优化
- 确保设备散热通风:将电脑放置在通风良好的地方,避免放在床上、沙发等柔软表面,防止散热口堵塞;
- 降低 CPU 功耗:对于支持 cTDP 调节的 CPU(如 AMD Ryzen 5 3450U),可通过
cpupower工具将 CPU 功耗限制在 10W,减少发热,避免因高温降频:
plaintext
sudo apt install cpupower
sudo cpupower frequency-set -u 2.1GHz
sudo cpupower set -b 10W
- 外接散热设备:若长期进行复杂仿真,可购买便携式散热支架(售价 20-50 元),提升散热效果。
第三部分:资源挖掘 —— 零成本获取全球优质学习资料
3.1 官方文档:最权威的免费学习指南
官方文档是技术学习的 “第一手资料”,具有权威性、准确性、时效性强的特点,且完全免费,是普通人学习 AI 与机器人的核心资源。
3.1.1 ROS2 官方文档
ROS2 官方文档(https://docs.ros.org/en/jazzy/index.html)涵盖了从安装配置、核心概念、基础教程到高级应用的全部内容,是学习 ROS2 的首选资源。
-
核心内容:
- 安装指南:详细介绍了 Ubuntu、Windows、macOS 等系统的安装步骤,包括依赖包安装、环境变量配置、验证方法,新手可按步骤操作,轻松完成安装;
- 核心概念:解释了 ROS2 的核心术语(如节点、话题、服务、动作、参数)、通信机制、数据类型,帮助学习者建立对 ROS2 的基础认知;
- 基础教程:通过 “Hello World”、节点通信、服务调用、动作客户端 / 服务器等简单案例,引导学习者动手实践,掌握 ROS2 的基本使用方法;
- 高级教程:涵盖参数服务器、生命周期节点、多机器人通信、ROS2 与 C++/Python 集成等内容,满足进阶学习需求;
- 生态系统:介绍了 ROS2 的功能包、工具链、第三方集成(如与 Webots、Gazebo 的集成),帮助学习者拓展应用场景。
-
学习方法:
- 按 “安装 -> 核心概念 -> 基础教程 -> 高级教程” 的顺序学习,循序渐进;
- 每学习一个教程,立即动手实践,复制代码并运行,观察结果,理解代码逻辑;
- 遇到问题时,查看文档中的 “Troubleshooting” 章节,或在文档底部的评论区寻找解决方案。
3.1.2 Webots 官方文档
Webots 官方文档(https://cyberbotics.com/doc/guide/index)是学习 Webots 仿真软件的权威资源,内容全面、案例丰富,适合新手快速入门。
-
核心内容:
- 快速入门:介绍 Webots 的界面布局、基本操作(如场景创建、机器人添加、传感器配置),帮助学习者快速熟悉软件;
- 机器人模型搭建:详细讲解了如何通过 Webots 的模型编辑器,创建自定义机器人(如差分小车、机械臂),配置关节、传感器、执行器;
- 仿真场景设计:介绍了如何添加地形、障碍物、光源、物理属性,创建真实的仿真环境;
- 控制器编程:讲解了如何使用 Python、C++ 等语言编写机器人控制器,实现自主避障、路径规划等功能;
- 与 ROS2 集成:提供了 Webots 与 ROS2 通信的详细教程,包括数据格式转换、节点配置、仿真数据传输,实现 “仿真 - 控制” 一体化。
-
学习方法:
- 从 “快速入门” 章节开始,先熟悉软件操作,再学习模型搭建与编程;
- 跟随文档中的案例,一步步创建仿真场景、编写控制器,积累实践经验;
- 利用文档中的 “示例场景”(Webots 安装后自带),直接运行并分析代码,快速理解核心逻辑。
3.1.3 AI 框架官方文档
对于想要学习人工智能算法的学习者,TensorFlow、PyTorch 等主流框架的官方文档是不可或缺的资源。
-
TensorFlow 官方文档(https://www.tensorflow.org/guide):
- 核心内容:包括 TensorFlow 的基础概念(张量、计算图、自动微分)、模型构建(Sequential、Functional API)、训练与评估、模型部署等;
- 优势:提供了大量的入门教程、实战案例(如图像分类、文本生成),支持 Python、C++ 等多种语言,适合不同基础的学习者。
-
PyTorch 官方文档(https://pytorch.org/tutorials/):
- 核心内容:涵盖 PyTorch 的基础操作(张量运算、自动微分)、神经网络构建、模型训练、迁移学习等;
- 优势:API 设计简洁直观,文档案例丰富,适合新手入门,且社区活跃度高,问题解决方案丰富。
-
学习方法:
- 先学习 Python 基础,再入手 AI 框架文档;
- 从 “基础教程” 开始,逐步掌握张量运算、模型构建等核心技能;
- 结合具体案例(如 MNIST 手写数字识别),动手编写代码,理解算法原理。
3.2 视频教程:直观易懂的可视化学习资源
视频教程通过 “演示 + 讲解” 的方式,将复杂的知识点直观呈现,适合新手入门,且互联网上有大量免费的优质视频教程,覆盖 AI 与机器人学习的全流程。
3.2.1 B 站:国内优质免费视频聚集地
B 站拥有大量机器人、AI 领域的优质 UP 主,提供免费的入门教程、实战案例、工具使用技巧,是国内学习者的首选视频平台。
-
推荐 UP 主与课程:
- 古月居:ROS 领域的知名 UP 主,提供 ROS1、ROS2 的全套免费教程,包括安装配置、基础概念、实战项目(如自主避障小车、SLAM 仿真),讲解详细、逻辑清晰,适合新手;
- 鱼香 ROS:专注于 ROS2 教学,提供 “ROS2 Jazzy 入门到精通” 系列教程,内容涵盖节点通信、服务调用、参数配置、SLAM 算法等,配套代码开源,可直接下载学习;
- Webots 中文社区:提供 Webots 的中文入门教程,包括界面操作、模型搭建、控制器编程、与 ROS2 集成等内容,解决了英文文档的语言障碍;
- 李沐:AI 领域的知名学者,提供 “动手学深度学习” 系列免费课程,涵盖神经网络、卷积神经网络、循环神经网络、Transformer 等核心算法,结合 PyTorch 框架,理论与实践结合,适合 AI 入门学习者。
-
学习方法:
- 选择一个系列教程,按顺序系统学习,避免碎片化观看;
- 观看视频时,暂停并跟随操作,确保每一步都能独立完成;
- 做好学习笔记,记录核心知识点、代码逻辑、常见问题及解决方案;
- 视频学习后,通过自主实践巩固知识点,如模仿教程中的项目,独立完成一个相似的案例。
3.2.2 YouTube:全球优质免费视频资源库
YouTube 拥有全球范围内的优质技术视频教程,覆盖 AI 与机器人领域的前沿内容,适合想要接触国际先进技术的学习者。
-
推荐频道与课程:
- ROS Official:ROS 官方频道,提供 ROS2 的最新教程、功能演示、社区动态,内容权威、时效性强;
- Webots:Webots 官方频道,提供仿真案例演示、工具使用技巧、高级功能教程,帮助学习者拓展 Webots 的应用场景;
- sentdex:提供 Python、AI、机器人的免费教程,内容通俗易懂,案例丰富,适合新手入门;
- Two Minute Papers:讲解 AI 领域的前沿研究成果,用简洁的语言解释复杂的算法原理,帮助学习者了解行业动态。
-
学习方法:
- 利用 Chrome 浏览器的自动翻译功能,解决英文字幕障碍;
- 优先选择带字幕的视频,便于理解和回顾;
- 结合官方文档学习,视频教程负责直观演示,官方文档负责深入理解。
3.3 开源社区:共享协作的学习生态
开源社区是技术学习者的 “知识库 + 交流平台”,不仅能获取免费的代码资源、项目案例,还能与全球开发者交流经验、解决问题,是普通人提升技术能力的核心渠道。
3.3.1 GitHub:全球最大的开源代码仓库
GitHub(https://github.com/)是全球最大的开源代码托管平台,拥有海量的机器人、AI 项目源码,可免费下载学习、复用、修改,是实践学习的核心资源。
-
核心资源类型:
- 入门项目:适合新手的简单项目,如 “ROS2 Hello World”“Webots 简单避障小车”“Python 实现神经网络”,代码简洁、注释详细,便于理解;
- 实战项目:复杂的完整项目,如 “基于 ROS2 的 SLAM 导航系统”“Webots 多机器人协同仿真”“PyTorch 图像分类模型”,可学习项目架构设计、模块划分、代码优化技巧;
- 功能包与工具:开源的 ROS2 功能包、AI 算法库,如 “激光雷达 SLAM 功能包”“路径规划算法库”,可直接集成到自己的项目中,提升开发效率;
- 学习笔记与教程:开发者分享的学习笔记、教程源码,如 “ROS2 学习笔记”“Webots 编程教程”,提供了不同视角的学习思路。
-
学习方法:
- 搜索关键词:通过 “ROS2 beginner”“Webots simulation”“PyTorch tutorial” 等关键词,查找适合自己的项目;
- 克隆代码:使用
git clone命令将项目克隆到本地,运行并分析代码逻辑; - 修改与复用:在原有项目的基础上,修改代码实现新的功能,如在避障小车项目中添加路径规划功能;
- 参与开源:当技术能力提升后,可参与开源项目的贡献(如修复 BUG、添加新功能),积累实战经验,提升行业认可度。
3.3.2 CSDN:国内开发者的交流平台
CSDN(https://www.csdn.net/)是国内最大的技术社区,拥有大量开发者分享的学习笔记、实战经验、问题解决方案,适合国内学习者交流学习。
-
核心资源类型:
- 技术博客:开发者分享的学习心得、项目总结,如 “ROS2 节点通信详解”“Webots 与 ROS2 集成避坑指南”,内容贴近实际学习场景,实用性强;
- 问答社区:学习者可在社区中提问,解决学习过程中遇到的问题,也可回答其他学习者的问题,巩固知识点;
- 资源下载:提供免费的代码、工具、教程文档下载,如 “ROS2 功能包合集”“Webots 仿真模型库”,方便学习者快速获取资源。
-
学习方法:
- 搜索问题:遇到问题时,通过 CSDN 搜索关键词,查找解决方案,如 “ROS2 话题通信失败”“Webots 仿真卡顿”;
- 阅读博客:选择高质量的技术博客(按阅读量、点赞数筛选),学习开发者的学习方法、项目经验;
- 分享笔记:将自己的学习笔记、项目总结发布到 CSDN,与其他学习者交流,接受反馈,提升自己。
3.3.3 ROS 社区与 Webots 社区
- ROS 社区(https://discourse.ros.org/):ROS 官方社区,全球开发者在此交流 ROS 相关的问题、经验、最新动态,可提问或搜索问题解决方案,了解 ROS 的前沿发展;
- Webots 社区(https://cyberbotics.com/forum/):Webots 官方论坛,可与 Webots 开发团队、全球用户交流仿真软件的使用技巧、问题解决方案,获取官方技术支持。
3.4 高校资源:免费的学术与课程资源
国内外高校纷纷开放了机器人、AI 领域的公开课、学术论文、数据集,这些资源具有专业性、系统性强的特点,可免费获取,是提升理论水平的重要渠道。
3.4.1 国内高校公开课
-
慕课(MOOC)平台:中国大学 MOOC(https://www.icourse163.org/)、学堂在线(https://www.xuetangx.com/)等平台,提供大量高校的免费公开课,如:
- 清华大学《机器人学基础》:讲解机器人的运动学、动力学、控制原理,为机器人学习奠定理论基础;
- 北京大学《人工智能导论》:介绍人工智能的基本概念、核心算法、应用场景,适合 AI 入门学习者;
- 哈尔滨工业大学《机器人仿真技术》:讲解机器人仿真的基本原理、工具使用、项目实践,与 Webots、ROS 等工具结合紧密。
-
学习方法:
- 选择与自己学习阶段匹配的课程,初期选择入门级课程,避免直接学习高深理论;
- 按课程大纲系统学习,完成课后作业与实践项目,巩固理论知识;
- 结合实践工具学习,将课程中的理论知识应用到 ROS2、Webots 的实践中,实现 “理论 - 实践” 结合。
3.4.2 国外高校公开课
-
Coursera(https://www.coursera.org/)、edX(https://www.edx.org/)等平台,提供哈佛大学、斯坦福大学、麻省理工学院(MIT)等顶尖高校的免费公开课:
- MIT《Introduction to Robotics》:机器人学的经典课程,讲解机器人的运动学、动力学、路径规划等核心内容,配套实验与代码,理论与实践结合;
- 斯坦福大学《CS229: Machine Learning》:机器学习领域的经典课程,由 Andrew Ng 讲授,涵盖线性回归、逻辑回归、支持向量机、神经网络等核心算法,是 AI 学习的必学课程;
- 加州大学伯克利分校《CS188: Introduction to Artificial Intelligence》:人工智能入门课程,讲解搜索算法、博弈论、机器学习等内容,配套实验项目,适合新手。
-
学习方法:
- 选择带中文字幕的课程,降低语言障碍;
- 下载课程讲义与课件,辅助学习;
- 参与课程讨论区,与全球学习者交流学习心得,解决疑问。
3.4.3 学术论文与数据集
- 学术论文:Google Scholar(https://scholar.google.com/)、arXiv(https://arxiv.org/)等平台,可免费下载机器人、AI 领域的学术论文,了解前沿研究成果;
- 数据集:Kaggle(https://www.kaggle.com/)、MNIST、CIFAR-10 等免费数据集,可用于 AI 算法的训练与测试,提升实践能力。
第四部分:学习体系 —— 构建 “理论 - 实践 - 复盘” 的闭环
4.1 学习阶段划分:循序渐进,稳步提升
AI 与机器人学习是一个系统性工程,需按阶段逐步推进,避免急于求成。结合普通人的学习能力与时间精力,可将学习过程划分为三个阶段:入门阶段、进阶阶段、实战阶段。
4.1.1 入门阶段(1-3 个月):夯实基础,掌握工具
核心目标:掌握 Python 编程基础、ROS2 核心操作、Webots 基本使用,能完成简单的仿真与代码编写。
-
学习内容:
- Python 编程基础:变量、数据类型、循环、条件判断、函数、类与对象、模块导入,重点掌握 NumPy、Matplotlib 等数据分析与可视化库;
- Ubuntu 系统基础:命令行操作(cd、ls、mkdir、rm、sudo 等)、文件管理、软件安装与卸载、环境变量配置;
- ROS2 基础:安装配置、核心概念(节点、话题、服务、参数)、基础工具(ros2 run、ros2 topic、ros2 service、rqt)、简单节点编程(Python);
- Webots 基础:界面操作、场景创建、机器人模型添加(如差分小车)、传感器配置(如距离传感器)、简单控制器编程(Python)。
-
实践项目:
- Python 小项目:编写 “计算器”“猜数字游戏”“数据可视化图表”,巩固编程基础;
- ROS2 小项目:实现 “Hello World” 节点通信、服务调用(如加法服务)、参数配置(如设置机器人速度);
- Webots 小项目:创建简单场景,添加差分小车与距离传感器,编写控制器实现自主避障(碰到障碍物后转向)。
-
学习方法:
- 每天投入 1-2 小时,保持学习连贯性;
- 优先通过视频教程入门,再结合官方文档深入理解;
- 每学习一个知识点,立即动手实践,确保掌握。
4.1.2 进阶阶段(3-6 个月):深化理论,提升技能
核心目标:掌握机器人学基础理论、ROS2 高级功能、Webots 复杂仿真、基础 AI 算法,能完成复杂的仿真项目与算法调试。
-
学习内容:
- 机器人学基础:运动学(正运动学、逆运动学)、动力学基础、传感器原理(激光雷达、摄像头、IMU)、路径规划算法(A*、Dijkstra);
- ROS2 进阶:生命周期节点、动作通信、多机器人通信、ROS2 与 C++ 编程、功能包开发与发布;
- Webots 进阶:复杂机器人模型搭建(如机械臂)、多传感器融合(激光雷达 + 摄像头)、仿真场景优化(物理参数调整、光影效果设置)、与 ROS2 深度集成;
- AI 基础算法:机器学习基础(线性回归、逻辑回归、决策树)、深度学习基础(神经网络、卷积神经网络 CNN)、OpenCV 图像处理(图像读取、滤波、边缘检测、目标识别)。
-
实践项目:
- ROS2 项目:开发自定义功能包,实现多节点通信、动作客户端 / 服务器(如机器人移动到指定位置)、SLAM 基础(使用激光雷达构建地图);
- Webots 项目:搭建机械臂仿真场景,编写控制器实现机械臂抓取物体;创建多机器人协同场景,实现机器人编队移动;
- AI 项目:使用 OpenCV 实现目标检测(如识别绿色盒子);使用 PyTorch 实现 MNIST 手写数字识别。
-
学习方法:
- 增加学习时间至每天 2-3 小时,周末可进行集中实践;
- 结合高校公开课与学术论文,深化理论知识;
- 参与开源项目,学习优秀的代码架构与编程技巧。
4.1.3 实战阶段(6-12 个月):综合应用,解决问题
核心目标:将理论知识与实践技能结合,完成综合性实战项目,具备独立开发、解决实际问题的能力。
-
学习内容:
- 机器人系统集成:ROS2+Webots+AI 算法的综合应用,如基于 AI 目标检测的机器人自主导航;
- 前沿技术探索:强化学习在机器人控制中的应用、多机器人协同 SLAM、智能机器人路径规划优化;
- 项目开发流程:需求分析、系统设计、代码编写、调试测试、文档编写、项目部署。
-
实践项目:
- 综合性项目 1:基于 ROS2 与 Webots 的自主导航机器人,集成激光雷达 SLAM、A * 路径规划、避障算法,实现机器人从起点到终点的自主移动;
- 综合性项目 2:基于 AI 与机器人的智能分拣系统,使用摄像头 + OpenCV 识别物体,机械臂实现自动抓取与分拣;
- 创新性项目:结合前沿技术,开发具有创新性的项目,如基于强化学习的机器人自适应控制、多机器人协同搜救仿真系统。
-
学习方法:
- 以项目为核心,驱动学习与实践;
- 组建学习小组,与其他学习者协作完成项目,提升团队协作能力;
- 参加机器人、AI 领域的竞赛(如 RoboCon、Kaggle 竞赛),以赛促学,提升实战能力。
4.2 核心技能拆解:聚焦关键,逐个突破
AI 与机器人学习涉及多个领域的知识,无需面面俱到,需聚焦核心技能,逐个突破,构建自己的 “技能树”。
4.2.1 编程技能:Python 与 C++
编程是 AI 与机器人学习的基础,需掌握 Python 与 C++ 两种语言:
-
Python:适合 AI 算法开发、ROS2 快速原型开发、Webots 控制器编程,具有语法简洁、开发效率高、开源库丰富的优势,是初期学习的重点;
-
C++:适合 ROS2 高性能节点开发、机器人底层控制,具有运行速度快、内存占用低的优势,进阶阶段需重点掌握。
-
学习重点:
- Python:基础语法、NumPy、Matplotlib、OpenCV、PyTorch/TensorFlow;
- C++:基础语法、STL 标准库、ROS2 C++ API、多线程编程。
-
实践方法:
- 每天编写 1-2 个小代码片段,巩固语法;
- 用 Python 编写 ROS2 节点、Webots 控制器、AI 算法;
- 进阶阶段用 C++ 重构 Python 项目,提升性能。
4.2.2 机器人工具技能:ROS2 与 Webots
ROS2 与 Webots 是机器人学习的核心工具,需熟练掌握:
-
ROS2:重点掌握节点通信、服务调用、动作通信、参数配置、功能包开发、SLAM 相关工具(如 Cartographer、SLAM Toolbox);
-
Webots:重点掌握场景创建、机器人模型搭建、传感器配置、控制器编程、与 ROS2 集成。
-
实践方法:
- 跟随官方教程与视频教程,完成所有基础案例;
- 开发自定义功能包与仿真场景,积累实践经验;
- 解决实际问题,如调试节点通信异常、优化仿真卡顿、集成第三方功能包。
4.2.3 理论知识技能:机器人学与 AI 算法
理论知识是技术提升的核心,需掌握:
-
机器人学:运动学、动力学、传感器原理、路径规划算法;
-
AI 算法:机器学习基础、深度学习基础、图像处理算法。
-
学习方法:
- 结合高校公开课与教材,系统学习理论知识;
- 用代码实现理论算法,如用 Python 实现 A * 路径规划算法、神经网络;
- 在仿真项目中应用理论知识,如将路径规划算法应用到机器人自主导航中。
4.2.4 问题解决技能:调试与优化
问题解决能力是技术学习的核心竞争力,需在实践中不断积累:
-
调试技能:掌握 ROS2 日志查看(ros2 topic echo、rqt_logger_level)、Webots 仿真调试、代码调试(VS Code 调试工具);
-
优化技能:掌握内存优化、渲染优化、算法优化、代码优化的方法。
-
实践方法:
- 记录学习过程中遇到的问题及解决方案,建立个人 “问题手册”;
- 分析开源项目的 BUG 修复过程,学习调试思路;
- 对自己的项目进行优化,提升性能与稳定性。
4.3 学习习惯培养:高效学习,持续进步
良好的学习习惯是长期坚持的关键,需培养以下习惯:
4.3.1 目标导向:明确学习目标
- 制定短期目标:每周、每月制定明确的学习目标,如 “本周掌握 ROS2 话题通信”“本月完成 Webots 避障小车项目”;
- 制定长期目标:明确自己的学习方向,如 “机器人自主导航”“AI 视觉识别”,围绕目标构建知识体系;
- 定期复盘目标:每周、每月复盘学习目标的完成情况,调整学习计划。
4.3.2 笔记整理:积累知识财富
- 手写笔记与电子笔记结合:重要知识点用手写笔记记录,便于记忆;代码、项目文档用电子笔记(如 Notion、Typora)记录,便于检索;
- 笔记分类整理:按 “知识点”“项目”“问题解决方案” 分类整理笔记,构建个人知识库;
- 定期回顾笔记:每周、每月回顾笔记,巩固知识点。
4.3.3 复盘总结:沉淀实践经验
- 项目复盘:每个项目完成后,复盘项目过程中的问题、解决方案、经验教训,提升项目开发能力;
- 每日复盘:每天学习结束后,总结当天的知识点、收获与不足,调整第二天的学习计划;
- 阶段复盘:每个学习阶段结束后,复盘阶段目标完成情况、技能提升情况,制定下一阶段的学习计划。
4.3.4 持续输入:保持学习热情
- 关注行业动态:通过公众号(如 “古月居”“机器之心”“量子位”)、知乎、YouTube 等渠道,关注机器人、AI 领域的最新动态、技术趋势;
- 阅读技术书籍:选择经典的技术书籍(如《ROS 2 入门到精通》《机器人学导论》《深度学习》),系统提升理论水平;
- 参加技术讲座:线上线下的技术讲座、研讨会,了解前沿技术,拓展人脉。
第五部分:实践路径 —— 从仿真到实战的落地指南
5.1 仿真实践:零成本积累项目经验
仿真实践是普通人学习机器人与 AI 的核心路径,无需实体机器人,即可在电脑上完成从模型搭建到算法验证的全流程,零成本积累项目经验。
5.1.1 仿真实践的核心优势
- 零成本:无需购买实体机器人、传感器、场地,仅需一台低成本电脑即可开展;
- 低风险:可反复调试算法,无需担心实体机器人损坏、安全事故;
- 高效率:可快速修改仿真场景、机器人参数、算法逻辑,缩短开发周期;
- 高灵活性:可模拟各种复杂场景(如极端地形、多机器人协同),拓展实践场景。
5.1.2 仿真实践的步骤与方法
以 “基于 ROS2 与 Webots 的自主避障小车” 项目为例,讲解仿真实践的步骤与方法:
-
项目需求分析:
- 功能需求:机器人能自主移动,通过距离传感器检测障碍物,遇到障碍物后自动转向避障;
- 性能需求:仿真帧率稳定在 10fps 以上,避障响应时间小于 0.5 秒;
- 技术选型:ROS2 Jazzy、Webots 2025a、Python、距离传感器。
-
仿真场景搭建(Webots):
- 创建场景:打开 Webots,新建场景,设置地面、光源、物理参数;
- 添加机器人:从 Webots 模型库中选择差分小车(如 “e-puck”),添加到场景中;
- 配置传感器:为小车添加距离传感器(如 “ps0-ps7”),设置传感器参数(检测范围、更新频率);
- 配置执行器:确保小车的车轮执行器正常工作,支持速度控制。
-
ROS2 功能开发:
- 创建功能包:使用
ros2 pkg create --build-type ament_python obstacle_avoidance命令创建功能包; - 编写传感器数据订阅节点:订阅 Webots 发布的距离传感器数据话题(如
/epuck/ps0),获取障碍物距离信息; - 编写避障控制节点:根据传感器数据判断是否遇到障碍物,若遇到障碍物则计算转向角度,发布速度控制话题(如
/epuck/cmd_vel); - 配置 Launch 文件:编写 Launch 文件,一次性启动传感器节点、避障控制节点、Webots 仿真节点。
- 创建功能包:使用
-
调试与优化:
- 运行项目:使用
ros2 launch obstacle_avoidance obstacle_avoidance_launch.py命令运行项目; - 调试问题:通过
ros2 topic echo查看话题数据,使用 rqt 查看节点通信状态,解决传感器数据异常、避障逻辑错误等问题; - 性能优化:关闭 Webots 不必要的可视化效果,优化避障算法逻辑,提升仿真帧率。
- 运行项目:使用
-
项目文档编写:
- 编写 README 文件:说明项目功能、安装依赖、运行方法、代码结构;
- 编写技术文档:记录项目开发过程、核心算法逻辑、问题解决方案。
5.1.3 仿真实践的进阶方向
- 多传感器融合:添加激光雷达、摄像头、IMU 等传感器,实现更精准的环境感知;
- 复杂算法应用:集成 SLAM 算法(如 Cartographer)构建地图,应用 A*、Dijkstra 算法实现路径规划;
- 多机器人协同:创建多机器人仿真场景,实现机器人编队、协同避障、任务分配;
- AI 算法集成:使用 OpenCV 实现目标识别,结合强化学习优化机器人控制策略。
5.2 低成本实体实践:从仿真到现实的过渡
当仿真实践积累到一定程度后,可尝试低成本实体实践,将仿真中的算法迁移到实体机器人上,实现 “仿真 - 现实” 的闭环。
5.2.1 低成本实体机器人选型(1000-2000 元)
- 推荐机器人:Arduino Uno+L298N 电机驱动板 + 差分小车底盘 + 超声波传感器,总成本约 300 元;或购买成品低成本机器人(如树莓派小车、ESP32 小车),价格约 500-1000 元;
- 核心配置:CPU(Arduino Uno、树莓派 Zero、ESP32)、电机驱动板、差分小车底盘、超声波传感器 / 红外传感器、电池;
- 优势:价格低廉,易于组装,支持 Python/C++ 编程,可直接移植仿真中的算法(如避障算法、路径规划算法)。
5.2.2 实体实践的步骤与方法
以 “基于 Arduino 的自主避障小车” 项目为例,讲解实体实践的步骤与方法:
-
硬件组装:
- 组装小车底盘:安装车轮、电机、电机支架;
- 连接电路:将 Arduino Uno、L298N 电机驱动板、超声波传感器、电池按电路图连接;
- 调试硬件:确保电机能正常转动,传感器能正常采集数据。
-
软件开发:
- 编写传感器数据采集代码:使用 Arduino IDE 编写代码,读取超声波传感器数据;
- 编写避障控制代码:根据传感器数据,控制电机转速与方向,实现避障功能;
- 移植仿真算法:将 Webots 仿真中的避障算法优化后,移植到 Arduino 代码中。
-
调试与优化:
- 硬件调试:解决传感器数据不准、电机转动异常、电路接触不良等问题;
- 算法调试:根据实体机器人的实际表现,优化避障算法参数(如避障距离阈值、转向角度);
- 性能优化:降低代码功耗,延长电池续航时间;优化算法响应速度,提升避障准确性。
-
项目拓展:
- 添加无线通信:使用蓝牙、WiFi 模块,实现手机 APP 控制;
- 集成 AI 功能:使用 ESP32-CAM 模块实现简单的目标识别,结合避障算法实现智能导航;
- 连接 ROS2:使用树莓派作为主控,安装 ROS2,实现更复杂的机器人控制。
5.2.3 实体实践的注意事项
- 安全第一:避免机器人碰撞、电机过载,使用电池时注意防短路;
- 循序渐进:从简单功能(如避障、前进后退)开始,逐步拓展复杂功能;
- 耐心调试:实体机器人受硬件精度、环境干扰等因素影响,调试过程可能遇到较多问题,需耐心排查;
- 成本控制:优先使用低成本配件,避免盲目追求高端硬件,聚焦算法验证与功能实现。
5.3 竞赛与开源贡献:提升实战能力与行业认可度
竞赛与开源贡献是提升实战能力、积累行业经验、获得行业认可的重要途径,且多数竞赛与开源项目无需高额投入,适合普通人参与。
5.3.1 机器人与 AI 竞赛推荐
-
国内竞赛:
- RoboCon 全国大学生机器人大赛:面向大学生的机器人竞赛,分为多个赛道(如机器人创意赛、机器人足球赛),鼓励创新与实践,参赛成本低;
- 全国大学生电子设计竞赛:包含机器人相关题目,注重电子技术与机器人技术的结合,适合有一定电子基础的学习者;
- Kaggle 竞赛:全球知名的 AI 竞赛平台,包含图像分类、目标检测、自然语言处理等多个赛道,免费参赛,可使用免费数据集,适合 AI 学习者。
-
国际竞赛:
- ROSCon 机器人竞赛:ROS 社区举办的竞赛,聚焦 ROS 相关技术的应用,适合 ROS 学习者;
- Webots 机器人竞赛:Webots 官方举办的竞赛,使用 Webots 仿真软件,无需实体机器人,适合仿真实践经验丰富的学习者。
-
参赛方法:
- 组建团队:与同学、网友组队,分工合作(如算法设计、代码编写、仿真调试);
- 赛前准备:研究竞赛规则、往届优秀作品,制定参赛方案,进行针对性训练;
- 赛后复盘:总结参赛过程中的经验教训,提升实战能力。
5.3.2 开源项目贡献
-
贡献方式:
- 修复 BUG:在 GitHub 上查找开源项目(如 ROS2 功能包、Webots 模型库)的 BUG,提交修复代码;
- 添加新功能:为开源项目添加新的功能模块、支持新的传感器 / 机器人模型;
- 完善文档:翻译官方文档、补充代码注释、编写使用教程;
- 反馈问题:使用开源项目时,发现问题并提交 Issue,帮助开发者改进项目。
-
贡献步骤:
- 选择项目:选择自己熟悉的开源项目(如 ROS2 相关项目、Webots 相关项目);
- 学习项目:阅读项目文档、代码,了解项目结构、开发规范;
- 提交贡献:Fork 项目到自己的 GitHub 仓库,修改代码,提交 Pull Request,等待项目维护者审核。
-
贡献价值:
- 提升技术能力:在贡献过程中,学习优秀的代码架构、编程技巧,解决实际问题;
- 积累行业经验:开源项目贡献是个人技术能力的重要证明,可提升就业竞争力;
- 拓展人脉:与全球开发者交流合作,建立行业联系。
第六部分:社区赋能 —— 借力群体力量加速成长
6.1 加入学习社群:找到志同道合的伙伴
学习社群是普通人学习 AI 与机器人的 “加油站”,能提供技术支持、学习动力、资源共享,避免独自学习的孤独与迷茫。
6.1.1 社群类型与推荐
-
线上社群:
- ROS2 中文社区:QQ 群、微信群,聚集了大量 ROS2 学习者与开发者,可交流学习经验、解决技术问题、分享资源;
- Webots 中文社区:QQ 群、Discord 频道,提供 Webots 技术支持、仿真案例分享;
- 高校技术社群:各大高校的机器人社团、AI 社团,如清华大学机器人协会、北京大学 AI 协会,通过公众号、QQ 群开展线上交流;
- 行业社群:知乎机器人话题圈、CSDN 技术交流群、GitHub 讨论区,可与行业专家、资深开发者交流。
-
线下社群:
- 创客空间:各地的创客空间(如北京创客空间、上海新车间),提供硬件设备、工具、场地,定期举办技术分享、工作坊活动;
- 高校讲座与沙龙:关注本地高校的机器人、AI 领域讲座、沙龙活动,现场交流学习;
- 行业展会:参加机器人、AI 领域的展会(如世界机器人大会、中国国际智能产业博览会),了解行业动态,拓展人脉。
6.1.2 社群学习的方法与技巧
- 积极提问:遇到问题时,在社群中详细描述问题现象、已尝试的解决方案,寻求帮助;
- 主动分享:将自己的学习笔记、项目经验、资源链接分享到社群中,帮助他人,同时获得反馈;
- 参与讨论:参与社群中的技术讨论、话题辩论,拓宽视野,深化对知识点的理解;
- 组队学习:与社群中的伙伴组队,共同完成学习任务、实践项目、竞赛,提升团队协作能力。
6.2 寻找导师与榜样:少走弯路,快速成长
导师与榜样能为学习提供方向指导、经验分享,帮助普通人少走弯路,加速成长。
6.2.3 寻找导师的渠道
- 高校老师:联系本地高校机器人、AI 领域的老师,表达学习意愿,寻求指导(如请教问题、参与科研项目);
- 行业专家:通过开源社区、技术讲座、行业展会认识行业专家,发送邮件或私信表达学习需求,寻求指导;
- 资深学习者:在学习社群中寻找技术水平较高、乐于分享的资深学习者,拜其为师,学习经验。
6.2.4 向榜样学习的方法
- 研究榜样的经历:了解榜样的学习路径、项目经验、成长故事,借鉴其学习方法与思维模式;
- 模仿榜样的项目:下载榜样的开源项目,分析代码逻辑、项目架构,模仿其开发流程,独立完成类似项目;
- 与榜样交流:通过社群、社交媒体与榜样互动,请教学习中的困惑,获取针对性建议。
6.3 知识变现:以学促用,实现良性循环
当技术能力提升到一定程度后,可尝试知识变现,将学到的技能转化为收入,反哺学习投入,实现 “学习 - 实践 - 变现” 的良性循环。
6.3.1 低成本知识变现方式
- 技术博客与视频:在 CSDN、B 站等平台发布高质量的技术博客、视频教程,通过广告分成、粉丝打赏获得收入;
- 开源项目赞助:在 GitHub 上发布优质开源项目,接受用户赞助;
- 技术咨询与兼职:在猪八戒网、一品威客等平台,承接机器人编程、AI 算法调试、仿真项目开发等兼职任务;
- 线上教学:在腾讯课堂、网易云课堂等平台,开设低价的 AI 与机器人入门课程,面向新手教学。
6.3.2 知识变现的意义
- 经济收益:获得一定的收入,缓解学习投入的经济压力;
- 能力验证:知识变现是对个人技术能力的认可,增强学习信心;
- 提升能力:在变现过程中,需不断提升技术水平、表达能力、服务意识,促进个人全面成长;
- 建立品牌:通过知识变现,积累个人品牌影响力,为未来的职业发展打下基础。
第七部分:心态建设 —— 以坚韧与热爱对抗资源稀缺
7.1 接纳现状:在有限资源中寻找无限可能
对于预算有限的普通人而言,首先要学会接纳现状,承认资源的稀缺性,但不被其束缚。正如 ZhangRelay 的实践所示,664 元的低成本设备同样能支撑专业的技术学习,资源的多少并非决定学习成败的关键,如何利用资源才是核心。
接纳现状不等于安于现状,而是在正视资源有限的基础上,聚焦核心需求,将有限的资源用在刀刃上。比如,将资金优先投入到 “能支撑基础实践的硬件” 上,而非追求高端设备;将时间优先投入到 “核心技能学习” 上,而非碎片化的无效学习。
同时,要看到资源的 “可成长性”。初期的低成本配置只是起点,随着学习的深入、技术能力的提升,可通过知识变现、兼职等方式积累资金,逐步升级硬件、拓展学习资源,实现从 “有限资源” 到 “充足资源” 的过渡。
7.2 保持耐心:技术学习是一场持久战
AI 与机器人学习是一个长期的过程,不可能一蹴而就。在学习过程中,必然会遇到各种困难:硬件配置问题、代码调试失败、理论知识难懂、项目进展缓慢…… 这些都是正常现象,需要保持耐心,循序渐进。
- 接受 “慢” 节奏:技术学习没有捷径,每一个知识点的掌握、每一个技能的提升,都需要时间与精力的积累。不要急于求成,允许自己 “慢下来”,扎实掌握每一个基础知识点;
- 享受 “解决问题” 的过程:学习的核心价值不仅在于掌握技能,更在于培养解决问题的能力。每解决一个技术难题,都是一次能力的提升,要学会享受这个过程,从中获得成就感;
- 坚持长期主义:技术领域更新迭代快,需要保持长期学习的习惯。不要因为短期内看不到成果而放弃,坚持下去,时间会给你最好的回报。
7.3 培养热爱:驱动持续学习的内在动力
技术学习是枯燥的,尤其是在资源有限的情况下,更容易产生放弃的念头。此时,热爱是驱动持续学习的内在动力。
- 找到兴趣点:AI 与机器人领域涵盖多个方向(如自主导航、视觉识别、智能控制),找到自己感兴趣的方向,围绕兴趣点学习,能极大提升学习动力;
- 感受技术的魅力:通过仿真实践、实体项目,感受机器人与 AI 技术的神奇与强大,比如看到自己开发的机器人自主避障、完成任务时,会产生强烈的成就感与自豪感;
- 关注技术的价值:机器人与 AI 技术正在改变世界,改善人们的生活。关注技术的应用场景(如智能医疗、自动驾驶、工业自动化),认识到技术的社会价值,激发学习的使命感。
7.4 拒绝自我设限:相信自己的成长潜力
很多普通人之所以不敢涉足 AI 与机器人领域,并非因为资源不足,而是因为自我设限:“我没有高学历,学不会”“我没有钱买高端设备,肯定做不好”“我年纪大了,学不动了”…… 这些负面想法会成为学习的最大障碍。
要打破自我设限,相信自己的成长潜力:
- 学历不是决定因素:技术学习的核心是兴趣与努力,而非学历。无数成功的开发者没有高学历,但通过持续学习与实践,成为了行业专家;
- 资源不是决定因素:正如本文所证明的,低成本同样能开展有效的技术学习,资源的多少只是影响学习进度,而非学习成败;
- 年龄不是决定因素:技术学习没有年龄限制,无论是年轻人还是中年人,只要保持学习的热情与动力,都能掌握新的技能。
结语:人人皆可参与的技术普惠时代
AI 与机器人技术的发展,不是为了制造新的鸿沟,而是为了普惠大众,让每个人都能享受技术进步带来的红利。贫穷从来不是普通人与先进技术之间的障碍,真正的障碍是认知的局限、路径的迷茫与行动的迟疑。
通过 1000 元内的硬件配置,普通人可以搭建专业的学习平台;通过零成本的开源资源,普通人可以获取全球优质的学习资料;通过 “理论 - 实践 - 复盘” 的学习体系,普通人可以构建系统的知识与技能;通过社群赋能与心态建设,普通人可以在资源有限的情况下持续成长。
技术的大门从来没有关闭,它向每一个有梦想、有行动的人敞开。无论你是否贫穷,无论你是否有高学历,无论你是否有专业背景,只要你愿意学习、敢于实践、坚持下去,就一定能在 AI 与机器人的时代浪潮中找到自己的位置,实现个人成长与价值跃迁。
未来已来,技术普惠的时代已经到来。让我们以低成本的配置、零成本的资源、坚韧的心态,勇敢地踏入 AI 与机器人的世界,用技术改变自己的命运,用行动追赶时代的浪潮。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 18
18 0
0- 0



 已为社区贡献71条内容
已为社区贡献71条内容

所有评论(0)