EtherCAT+IgH 的一些概念
·
一、核心基础:EtherCAT 与 IgH 主站的本质
1. EtherCAT 的核心优势(实时性根源)
EtherCAT 并非传统以太网的 “点对点通信”,而是采用 **“主站广播 + 从站按需截取”** 的模式:
- 主站发送一帧报文,所有从站在总线上 “并行读取” 自己需要的数据,同时写入反馈数据;
- 报文仅需一次传输,无需等待从站逐一应答,延迟可低至微秒级;
- 支持分布式时钟同步,所有从站的时间偏差控制在 100ns 内,确保动作协同。
2. IgH 主站的角色:实时控制的 “总指挥”
IgH(EtherLab)是运行在 Linux 系统上的开源 EtherCAT 主站驱动,核心作用是:
- 管理 EtherCAT 总线的通信周期(如 1ms/10ms);
- 配置从站的 PDO/SDO 映射规则;
- 提供上层控制程序(如 ROS 2、自定义算法)与从站的接口;
- 保障数据传输的确定性(依赖 PREEMPT_RT 实时内核)。
二、IgH 主站核心组件详解(从概念到本质)
1. 主站(ec_master_t):总线的 “总调度中心”
- 定义:IgH 主站的顶层句柄,对应物理网卡与 EtherCAT 总线的绑定关系,是所有通信的起点。
- 通俗比喻:城市公交系统的 “调度中心”,负责规划线路、发车频率,协调所有公交车(从站)。
- 核心功能:
- 扫描总线,识别所有在线从站;
- 激活总线,启动周期通信;
- 管理 Domain(数据容器)与从站配置。
- 底层逻辑:通过
ecrt_request_master()申请主站资源,绑定指定网卡(如 eth0),禁用 TCP/IP 协议栈,专注 EtherCAT 报文传输。
2. 从站(ec_slave_config_t):总线的 “执行单元”
- 定义:EtherCAT 总线上的终端设备(如伺服驱动器、传感器、IO 模块),通过 “别名 + 位置” 或 “厂商 ID + 产品码” 被主站识别。
- 通俗比喻:公交系统中的 “公交车”,接收调度中心指令,完成运输任务(如电机运转、数据采集)。
- 核心特征:
- 固件中固化 “对象字典”(数据资产清单);
- 支持 PDO(实时数据)和 SDO(配置数据)传输;
- 具备同步管理器(SM),实现硬件级数据搬运。
3. Domain(域,ec_domain_t):PDO 数据的 “统一容器”
- 定义:IgH 主站创建的 “连续物理内存区域”,用于集中存储多个从站的 PDO 数据(控制指令 + 状态反馈)。
- 通俗比喻:快递驿站的 “分类快递箱”,把多个收件人的快递(不同从站的 PDO 数据)集中存放,方便统一收发。
- 核心价值:
- 避免主站与每个从站单独通信,提升实时性;
- 内存区域被 “锁定”(禁止操作系统换出),保障数据访问的确定性;
- 上层程序仅需读写 Domain 内存,无需关心总线传输细节。
- 底层逻辑:
- 通过
ecrt_master_create_domain()创建; - 内存大小由注册的 PDO 条目总字节数决定;
domain1_pd指针指向该内存起始地址,读写该指针即直接操作 PDO 数据。
- 通过
4. 对象字典(Object Dictionary):从站的 “数据目录册”
- 定义:从站固件中固化的 “数据资产清单”,是主从站的 “沟通字典”,所有可访问的参数(控制字、位置、速度等)都按 “索引 + 子索引” 定义。
- 通俗比喻:图书馆的 “图书目录卡”,每个条目包含 “图书编号(索引 + 子索引)、书名(参数含义)、存放位置(物理寄存器)”。
- 核心规则:
- 索引(如 0x6040):参数的唯一逻辑编号,遵循 CiA402 等国际标准(如 0x6040 = 控制字,0x6041 = 状态字);
- 子索引(如 0x00):索引下的细分条目(如子索引 0x00 表示 “该索引下的参数数量”);
- 逻辑索引≠物理地址:从站固件会将索引映射到实际物理寄存器(如 0x6040→0x40000000),用户无需关心底层地址。
5. PDO(Process Data Object):实时数据的 “高速通道”
- 定义:用于传输 “高频、实时、短数据”(如控制指令、位置反馈)的通道,按 “周期” 传输,无协商开销。
- 通俗比喻:城市的 “高速公路”,仅允许快速通行的车辆(实时数据),不设收费站(无握手协商)。
- 关键特性:
- 分为 RxPDO(主站→从站,控制指令)和 TxPDO(从站→主站,状态反馈);
- 数据长度固定,按 “映射规则” 打包传输;
- 优先级高于 SDO,确保实时控制不中断。
PDO 映射的三层结构(核心!)
PDO 映射是 “主从站约定数据传输规则” 的过程,分为三层定义,本质是 “层层封装 + 硬件绑定”:
(1)PDO 条目(ec_pdo_entry_info_t):单个 “数据单元”
- 定义:最小粒度的 PDO 数据,对应对象字典的一个参数(如控制字、目标速度)。
- 格式:
{索引, 子索引, 位宽},例:{0x6040, 0x00, 16}表示 “索引 0x6040 子索引 0 的控制字,占 16 位(2 字节)”。 - 本质:从站对象字典中的 “数据原子”,是 PDO 的最小组成单位。
(2)PDO(ec_pdo_info_t):数据 “分组打包”
- 定义:将同方向的多个 PDO 条目打包成一个 “数据组”,对应从站的 PDO 映射对象。
- 格式:
{PDO索引, 条目数量, 条目数组起始地址},例:{0x1600, 3, 条目数组}表示 “RxPDO 0x1600 包含 3 个控制类条目”。 - 标准 PDO 索引:RxPDO=0x1600,TxPDO=0x1A00(CiA402 标准),所有从站统一遵循。
(3)同步管理器(ec_sync_info_t):硬件 “数据搬运通道”
- 定义:从站 EtherCAT 芯片的物理模块,负责 PDO 数据的硬件级 DMA 搬运,是 “Domain 内存↔从站寄存器” 的桥梁。
- 格式:
{SM编号, 数据方向, PDO数量, PDO数组, 看门狗},例:{2, EC_DIR_OUTPUT, 1, RxPDO, 禁用看门狗}。 - 核心作用:
- SM2 绑定 RxPDO(主站→从站):将 Domain 内存中的控制指令,通过 DMA 直接写入从站寄存器;
- SM3 绑定 TxPDO(从站→主站):将从站寄存器的状态反馈,通过 DMA 打包成报文回传主站;
- 双缓冲区机制:避免 “主站写数据” 与 “从站读数据” 的冲突,保障数据完整性。
6. SDO(Service Data Object):配置数据的 “专用通道”
- 定义:用于传输 “低频、非实时、长数据”(如从站参数配置、设备信息读取)的通道,非周期传输,带握手协商。
- 通俗比喻:城市的 “普通公路”,允许货车(配置数据)通行,但需要遵守交通规则(握手协商)。
- 核心特性:
- 基于对象字典的索引 / 子索引访问(如读取从站版本号:索引 0x100A);
- 支持 “主站请求→从站应答” 的双向通信;
- 优先级低于 PDO,即使传输未完成,也会暂停以保障 PDO 周期。
三、IgH 主站的核心工作流程(从初始化到运行)
以 “1ms 周期控制从站运行” 为例,拆解完整流程:
1. 初始化阶段(一次性配置)
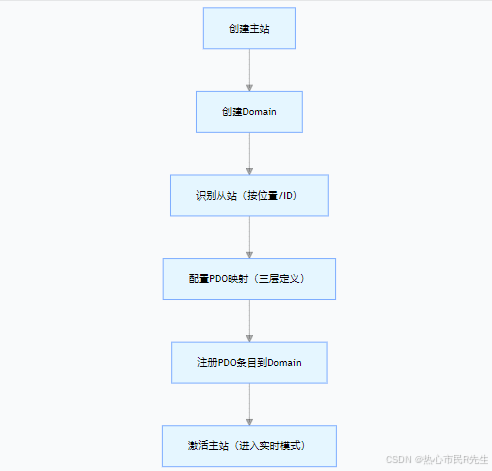
- 关键动作:
- 通过 SDO 将 PDO 映射规则写入从站(如 “RxPDO 0x1600 包含 0x6040/0x6060/0x60FF”);
- Domain 自动分配 PDO 条目在内存中的偏移量(offset),如控制字对应
offset.ctrl_word=0; - 激活主站后,网卡禁用 TCP/IP,专注 EtherCAT 报文传输。
2. 运行阶段(周期任务)
- 关键细节:
- 周期任务通过
usleep(1000)实现 1ms 间隔,调用cyclic_task(); - 数据搬运全程由 DMA(直接内存访问)完成,CPU 仅负责 “写入控制指令” 和 “读取反馈数据”,几乎无干预;
- 工作计数器(WC):主从站通过 WC 确认数据传输完整性,WC 异常则表示通信故障。
- 周期任务通过
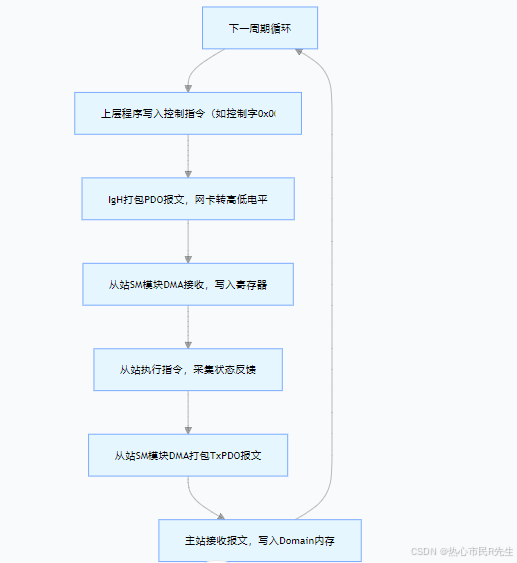
3. 核心数据流转:Domain 内存的 “读写魔法”
-
写 RxPDO(主站→从站):上层程序调用
EC_WRITE_U16(domain1_pd + offset.ctrl_word, 0x0006),直接修改 Domain 物理内存;IgH 通知网卡 DMA 将该内存数据打包成报文,发送到总线;从站 SM2 接收报文,DMA 写入对应寄存器。 -
读 TxPDO(从站→主站):从站 SM3 将寄存器数据 DMA 打包成报文,回传主站;网卡 DMA 将报文数据写入 Domain 内存对应位置;上层程序调用
EC_READ_U16(domain1_pd + offset.status_word),读取反馈数据。
四、关键概念关联:一张图看懂所有组件
| 组件 | 本质角色 | 核心关联 | 通俗比喻 |
|---|---|---|---|
| 主站 | 总线调度中心 | 管理 Domain 与从站 | 公交调度中心 |
| Domain | PDO 数据统一容器 | 存储所有 PDO 条目 | 分类快递箱 |
| 从站 | 执行单元 | 包含对象字典与 SM 模块 | 公交车 |
| 对象字典 | 数据目录册 | 定义 PDO 条目的逻辑索引 | 图书目录卡 |
| PDO 条目 | 最小数据单元 | 对应对象字典的一个参数 | 单个快递包裹 |
| PDO | 数据分组 | 打包同方向 PDO 条目 | 快递袋 |
| 同步管理器(SM) | 硬件数据搬运通道 | 绑定 PDO 与寄存器 | 快递运输车 |
| SDO | 配置通道 | 访问对象字典的非实时数据 | 普通公路(货车通行) |
五、实战关键要点(避坑指南)
1. 实时性保障的三个核心
- 内核:必须使用 PREEMPT_RT 实时内核,禁用 CPU 调度延迟;
- 内存:Domain 内存是物理内存,通过
mmap映射,避免虚拟内存换出; - 周期:控制周期需匹配从站采样率(如 1ms 周期对应 1ms 采样),避免数据过期。
2. PDO 映射的常见误区
- 误区 1:PDO 索引是物理地址→纠正:0x1600/0x1A00 是逻辑索引,对应从站固件的映射规则;
- 误区 2:Domain 内存是虚拟内存→纠正:是连续物理内存,支持 DMA 直接访问;
- 误区 3:PDO 与 SDO 同帧传输→纠正:两者独立通道,PDO 优先级更高,不会混传。
3. 调试核心指标
- 抖动(Jitter):控制在 10µs 内,否则导致从站动作抖动;
- 工作计数器(WC):连续周期 WC 不变表示通信故障;
- 跟随误差:从站实际位置与期望位置的差值,超阈值(如 0.5mm)会停机。
结语:EtherCAT+IgH 的核心逻辑总结
EtherCAT 的实时性源于 “单帧多站 + DMA 搬运”,IgH 主站的价值在于 “标准化配置 + 底层抽象”。核心逻辑可概括为:
- 主站创建 Domain(物理内存容器),通过 PDO 映射规则,将从站的控制 / 反馈数据与 Domain 内存绑定;
- 周期运行时,上层程序仅需读写 Domain 内存,IgH + 从站 SM 模块自动完成 “内存→总线→寄存器” 的高速搬运;
- 所有组件围绕 “确定性、低延迟” 设计,最终实现微秒级实时控制。
掌握这些核心概念,无论面对何种从站设备(伺服、IO、传感器),都能快速搭建 EtherCAT 实时控制系统。如果需要深入了解某一环节(如 PDO 映射配置、实时内核移植),欢迎在评论区交流!

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 21
21 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)