AUTOSAR OS 模块详解(六)事件管理机制:AUTOSAR OS 中事件的注册、触发与等待策略
摘要:AUTOSAR OS 的事件机制是实现事件驱动架构的关键,通过轻量级二进制信号实现任务间异步通信。扩展任务通过事件标志位实现同步与协作,具有极小的开销和高效的实时性。本文详细解析了事件管理模型、触发机制和等待策略,包括核心API(SetEvent、WaitEvent、GetEvent、ClearEvent)的使用方法,以及多事件处理、状态机实现等典型应用场景。同时总结了工程实践中常见错误的解
引言
在 AUTOSAR 量产项目开发中,扩展任务和事件机制是实现事件驱动架构的关键。
AUTOSAR OS 提供的事件(Event)机制是一种轻量级任务间通信方式,允许任务通过事件标志位(Event Mask)实现同步与协作。与其他 RTOS 的信号量或消息队列相比,事件机制无需数据传输,仅传递二进制信号,开销极小,非常适合构建事件驱动的状态机。本文将基于 AUTOSAR SWS OS 规范,结合真实项目经验,深入解析事件管理模型、事件触发机制和事件等待策略。
设计初衷与技术原理
事件管理模型:基础任务 vs 扩展任务
AUTOSAR OS 中的任务分为两类,事件机制仅适用于扩展任务:
| 任务类型 | 状态 | 事件支持 | 典型应用场景 |
|---|---|---|---|
| 基础任务(Basic Task) | SUSPENDED、READY、RUNNING | 不支持 | 周期性数据处理、简单控制逻辑 |
| 扩展任务(Extended Task) | SUSPENDED、READY、RUNNING、WAITING | 支持 | 事件驱动状态机、异步响应、多触发源任务 |
核心区别:
- 基础任务每次激活后执行一次,调用
TerminateTask()后返回 SUSPENDED 状态 - 扩展任务进入 WAITING 状态,等待事件触发后返回 READY 或 RUNNING 状态,通常运行在无限循环中
事件控制块(ECB)结构
事件管理的核心数据结构是事件控制块(Event Control Block, ECB) ,每个扩展任务拥有独立的 ECB。
typedef struct {
EventMaskType eventSet; /* 已设置的事件掩码 */
EventMaskType eventMask; /* 任务等待的事件掩码 */
TaskType ownerTask; /* 事件所有者任务 */
uint8_t pendingEvents; /* 待处理事件计数 */
} EventControlBlock;
事件掩码(Event Mask)机制:
- 事件掩码是一个 N 位向量,其中 N 是单个任务可以拥有的最大事件数(通常为 8、16、32 或 64 位)
- 每个事件占据一个 Bit,例如
Event1 = 0x01、Event2 = 0x02、Event3 = 0x04 - 支持通过位运算同时设置/等待多个事件
扩展任务状态转换图
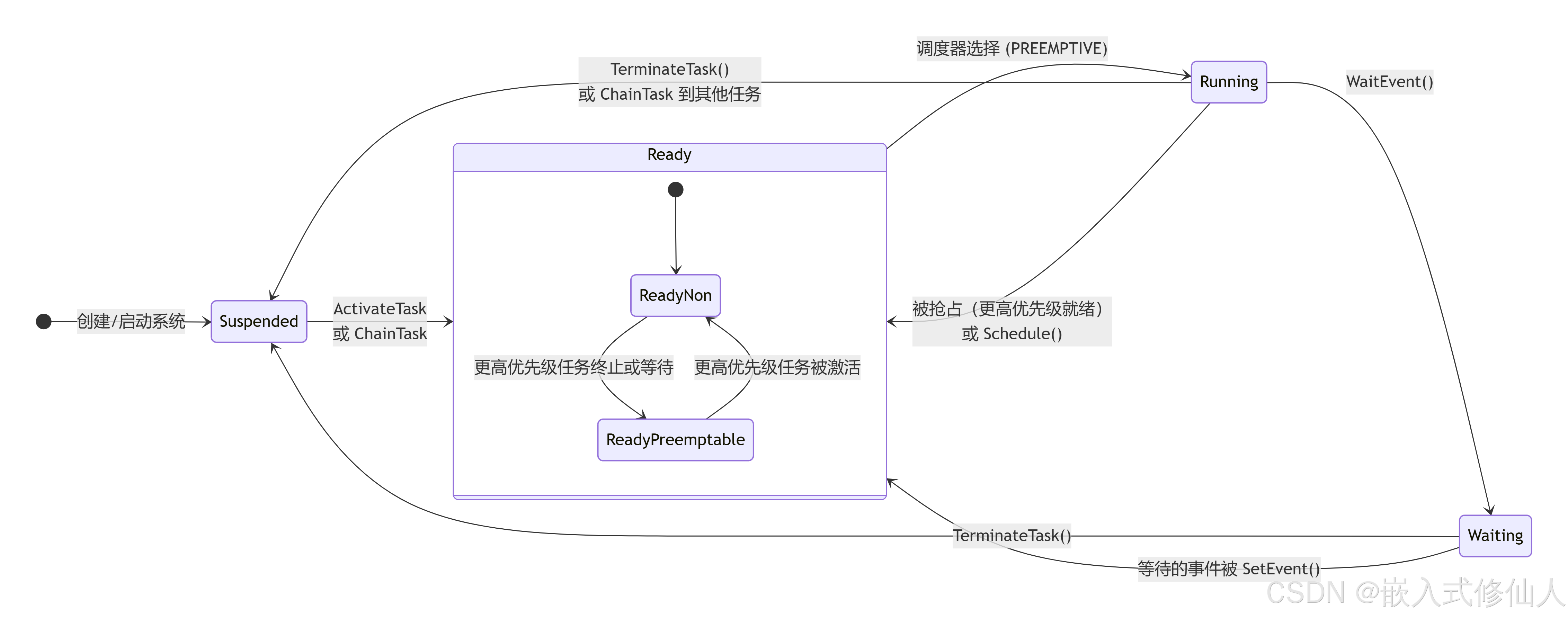
状态转换说明:
| 转换编号 | 源状态 → 目标状态 | 触发条件 | 调用的 OS API | 说明 |
|---|---|---|---|---|
| T1 | 挂起 → 就绪 | 任务被激活 | ActivateTask() 或 ChainTask() |
任务从静止状态进入调度队列 |
| T2 | 就绪 → 运行 | 调度器选择该任务 | 无(调度器内部行为) | 调度器根据优先级策略分配CPU |
| T3 | 运行 → 就绪 | 被更高优先级任务抢占 | 无(调度器内部行为) | 抢占式调度的核心行为 |
| T4 | 运行 → 等待 | 任务主动等待事件 | WaitEvent() |
任务因等待资源或信号而暂停 |
| T5 | 等待 → 就绪 | 等待的事件发生 | SetEvent()(由其他任务或ISR调用) |
事件驱动的任务唤醒 |
| T6 | 运行 → 挂起 | 任务正常终止 | TerminateTask() |
任务完成一次执行周期 |
| T7 | 运行 → 挂起 | 任务链式激活其他任务 | ChainTask() |
终止自己并激活另一个任务 |
| T8 | 等待 → 挂起 | 任务在等待中被强制终止 | TerminateTask()(由其他任务调用) |
异常或管理性终止 |
事件触发机制
事件注册与配置
在 AUTOSAR 配置工具(如 Vector DaVinci、ETAS ISOLAR)中,事件的配置包含以下要素:
<OsTask>
<OsTaskName>ExtendedTask_CanRx</OsTaskName>
<OsTaskType>EXTENDED</OsTaskType>
<OsTaskPriority>5</OsTaskPriority>
<OsTaskActivation>1</OsTaskActivation>
<OsTaskEvent>
<OsEventName>Event_CanRxFrame1</OsEventName>
<OsEventMask>0x01</OsEventMask>
<OsEventAutostart>
<OsEventAutostartName>AppMode_Normal</OsEventAutostartName>
</OsEventAutostart>
</OsTaskEvent>
<OsTaskEvent>
<OsEventName>Event_CanRxFrame2</OsEventName>
<OsEventMask>0x02</OsEventMask>
</OsTaskEvent>
</OsTask>
关键配置参数:
OsTaskType:必须设置为EXTENDED才能使用事件OsEventMask:事件的位掩码,可由工具自动分配或手动指定OsEventAutostart:指定事件在哪个 AppMode 下可用(可选)
工程注意事项:
- 同一个事件名称在不同任务中对应不同的 ECB,事件是任务私有的
- 设置事件时必须指定目标任务,
SetEvent(TaskID, EventMask) - 无法为处于 SUSPENDED 状态的任务设置事件,否则返回
E_OS_STATE错误
核心 API 详解
1. SetEvent(TaskType TaskID, EventMaskType Mask)
功能:为指定任务设置事件掩码中的所有事件。
参数:
TaskID:目标任务标识符Mask:要设置的事件掩码(可通过|组合多个事件)
返回值:
E_OK:成功设置事件E_OS_ID:任务标识符无效E_OS_ACCESS:目标任务不是扩展任务E_OS_STATE:目标任务处于 SUSPENDED 状态
调用上下文:任务、ISR2(不可在 ISR1 中调用)
代码示例:
/* 在中断服务程序中设置事件 */
ISR2(Can_Rx_Handler) {
uint8_t can_id = Can_ReadId();
/* 根据接收到的 CAN ID 设置不同事件 */
if (can_id == 0x100) {
SetEvent(Task_CanRx, Event_CanRxFrame1);
} else if (can_id == 0x200) {
SetEvent(Task_CanRx, Event_CanRxFrame2);
}
}
多事件同时设置示例:
TASK(Task_Sensor) {
/* 同时设置多个事件 */
SetEvent(Task_DataProcessing, Event_SensorReady | Event_Timeout);
TerminateTask();
}
2. WaitEvent(EventMaskType Mask)
功能:当前任务等待指定的事件掩码中的任意一个事件发生。
参数:
Mask:等待的事件掩码(可通过|组合多个事件)
返回值:
E_OK:成功等待事件E_OS_ACCESS:调用任务不是扩展任务E_OS_RESOURCE:调用任务持有资源(必须先释放资源再等待)E_OS_CALLEVEL:在中断上下文中调用
调用上下文:扩展任务
执行流程:
- 检查调用任务是否为扩展任务
- 检查任务是否持有资源(持有资源时禁止进入 WAITING 状态)
- 检查等待的事件掩码中是否已有事件发生
- 是:任务保持在 RUNNING 状态,立即返回
- 否:任务进入 WAITING 状态,触发任务调度
代码示例:
TASK(ExtendedTask_CanRx) {
EventMaskType receivedEvents;
while (TRUE) {
/* 等待任意一个 CAN 接收事件 */
WaitEvent(Event_CanRxFrame1 | Event_CanRxFrame2);
/* 获取具体发生的事件 */
GetEvent(ExtendedTask_CanRx, &receivedEvents);
/* 清除已处理的事件 */
ClearEvent(receivedEvents);
/* 根据不同事件执行不同处理逻辑 */
if (receivedEvents & Event_CanRxFrame1) {
ProcessFrame1();
}
if (receivedEvents & Event_CanRxFrame2) {
ProcessFrame2();
}
}
}
3. GetEvent(TaskType TaskID, EventMaskRefType Event)
功能:获取任务当前已设置的事件掩码。
参数:
TaskID:目标任务标识符Event:输出参数,存储事件掩码
返回值:
E_OK:成功获取事件E_OS_ID:任务标识符无效E_OS_ACCESS:目标任务不是扩展任务E_OS_STATE:目标任务处于 SUSPENDED 状态
调用上下文:任务、ISR2、ErrorHook
代码示例:
TASK(Task_Diagnostic) {
EventMaskType events;
/* 检查扩展任务是否有待处理事件 */
GetEvent(ExtendedTask_CanRx, &events);
if (events & Event_CanRxFrame1) {
/* 事件 1 已发生 */
printf("Event_CanRxFrame1 is pending\n");
}
}
4. ClearEvent(EventMaskType Mask)
功能:清除调用任务的指定事件。
参数:
Mask:要清除的事件掩码(可通过|组合多个事件)
返回值:
E_OK:成功清除事件E_OS_ACCESS:调用任务不是扩展任务E_OS_CALLEVEL:在中断上下文中调用
调用上下文:扩展任务
重要特性:
- 只有事件所有者(扩展任务)可以清除自己的事件
- 任务终止(
TerminateTask())时自动清除所有事件 - 必须在再次调用
WaitEvent()之前清除事件,否则会立即返回
代码示例:
TASK(ExtendedTask_StateMachine) {
EventMaskType events;
WaitEvent(Event_Wakeup | Event_Error | Event_Shutdown);
GetEvent(ExtendedTask_StateMachine, &events);
/* 清除所有等待的事件 */
ClearEvent(Event_Wakeup | Event_Error | Event_Shutdown);
/* 根据不同事件进行状态转换 */
if (events & Event_Wakeup) {
/* 处理唤醒逻辑 */
} else if (events & Event_Error) {
/* 处理错误逻辑 */
} else if (events & Event_Shutdown) {
/* 处理关机逻辑 */
}
}
事件触发源
AUTOSAR OS 中的事件可由以下来源触发:
| 触发源 | API 机制 | 典型应用场景 |
|---|---|---|
| 任务 | SetEvent(TaskID, EventMask) |
任务间通知、状态机状态转换 |
| ISR2 | SetEvent(TaskID, EventMask) |
中断驱动的异步处理(CAN 接收、ADC 完成) |
| Alarm | Alarm Action = SetEvent | 周期性事件、超时监控 |
| 调度表(Schedule Table) | Expiry Point Action = SetEvent | 多任务同步触发、时间分片处理 |
通过 Alarm 触发事件示例:
<OsAlarm>
<OsAlarmName>Alarm_PeriodicTrigger</OsAlarmName>
<OsAlarmCounterRef DEST="ECUC-REFERENCE-REF-SELECTOR">/Os/OsCounter_MainCounter</OsAlarmCounterRef>
<OsAlarmAction>SETEVENT</OsAlarmAction>
<OsAlarmSetEventTaskRef>ExtendedTask_DataProcessing</OsAlarmSetEventTaskRef>
<OsAlarmSetEventMask>0x01</OsAlarmSetEventMask>
<OsAlarmCyclic>
<OsAlarmCyclicStart>1000</OsAlarmCyclicStart>
<OsAlarmCyclicCycle>1000</OsAlarmCyclicCycle>
</OsAlarmCyclic>
</OsAlarm>
通过调度表触发事件示例:
<OsScheduleTable>
<OsScheduleTableName>ST_MultiTaskSync</OsScheduleTableName>
<OsScheduleTableCounterRef DEST="ECUC-REFERENCE-REF-SELECTOR">/Os/OsCounter_MainCounter</OsScheduleTableCounterRef>
<OsScheduleTableExpiryPoint>
<OsScheduleTableExpiryPointOffset>2000</OsScheduleTableExpiryPointOffset>
<OsScheduleTableExpiryPointAction>SETEVENT</OsScheduleTableExpiryPointAction>
<OsScheduleTableExpiryPointTaskRef>ExtendedTask_DataProcessing</OsScheduleTableExpiryPointTaskRef>
<OsScheduleTableExpiryPointEventMask>0x01</OsScheduleTableExpiryPointEventMask>
</OsScheduleTableExpiryPoint>
</OsScheduleTable>
事件等待策略
单事件等待
最简单的事件等待策略,适用于单一触发源的场景。
代码示例:
TASK(ExtendedTask_ButtonHandler) {
while (TRUE) {
/* 等待按钮按下事件 */
WaitEvent(Event_ButtonPressed);
/* 清除事件 */
ClearEvent(Event_ButtonPressed);
/* 处理按钮按下逻辑 */
ProcessButtonPress();
}
}
适用场景:
- 单一触发源的任务(如单个 CAN 帧接收、单一传感器数据更新)
- 顺序状态机(状态转换路径固定)
多事件等待
通过位运算同时等待多个事件,适用于多触发源或分支状态机的场景。
代码示例:
TASK(ExtendedTask_ErrorHandler) {
EventMaskType events;
while (TRUE) {
/* 同时等待多个错误事件 */
WaitEvent(Event_Error1 | Event_Error2 | Event_Error3);
/* 获取具体发生的事件 */
GetEvent(ExtendedTask_ErrorHandler, &events);
/* 根据不同错误事件执行不同处理逻辑 */
if (events & Event_Error1) {
ClearEvent(Event_Error1);
HandleError1();
}
if (events & Event_Error2) {
ClearEvent(Event_Error2);
HandleError2();
}
if (events & Event_Error3) {
ClearEvent(Event_Error3);
HandleError3();
}
}
}
注意事项:
- 必须使用
GetEvent()获取具体发生的事件 - 使用位运算
&判断具体哪个事件发生 - 必须调用
ClearEvent()清除已处理的事件,否则下次WaitEvent()会立即返回
事件驱动状态机
事件机制非常适合实现状态机,每个事件对应状态转换触发条件。
代码示例(三状态状态机) :
typedef enum {
STATE_IDLE,
STATE_RUNNING,
STATE_ERROR
} StateType;
TASK(ExtendedTask_StateMachine) {
StateType currentState = STATE_IDLE;
EventMaskType events;
while (TRUE) {
switch (currentState) {
case STATE_IDLE:
/* 等待唤醒或错误事件 */
WaitEvent(Event_Start | Event_Error);
GetEvent(ExtendedTask_StateMachine, &events);
if (events & Event_Start) {
ClearEvent(Event_Start);
currentState = STATE_RUNNING;
printf("Transition: IDLE -> RUNNING\n");
} else if (events & Event_Error) {
ClearEvent(Event_Error);
currentState = STATE_ERROR;
printf("Transition: IDLE -> ERROR\n");
}
break;
case STATE_RUNNING:
/* 等待停止、暂停或错误事件 */
WaitEvent(Event_Stop | Event_Pause | Event_Error);
GetEvent(ExtendedTask_StateMachine, &events);
if (events & Event_Stop) {
ClearEvent(Event_Stop);
currentState = STATE_IDLE;
printf("Transition: RUNNING -> IDLE\n");
} else if (events & Event_Pause) {
ClearEvent(Event_Pause);
printf("State: RUNNING (Paused)\n");
} else if (events & Event_Error) {
ClearEvent(Event_Error);
currentState = STATE_ERROR;
printf("Transition: RUNNING -> ERROR\n");
}
break;
case STATE_ERROR:
/* 等待恢复或关机事件 */
WaitEvent(Event_Recover | Event_Shutdown);
GetEvent(ExtendedTask_StateMachine, &events);
if (events & Event_Recover) {
ClearEvent(Event_Recover);
currentState = STATE_IDLE;
printf("Transition: ERROR -> IDLE\n");
} else if (events & Event_Shutdown) {
ClearEvent(Event_Shutdown);
printf("State: ERROR (Shutdown)\n");
TerminateTask();
}
break;
}
}
}
优势:
- 状态转换逻辑清晰,易于维护
- 支持多触发源和分支状态
- 通过事件解耦状态机与触发源
优先级反转处理
当高优先级扩展任务等待低优先级任务设置的事件时,可能发生优先级反转。
场景示例:
- Task_High(优先级 10)扩展任务,等待 Event_Ready
- Task_Low(优先级 1)基本任务,负责设置 Event_Ready
- Task_Mid(优先级 5)基本任务,可能抢占 Task_Low
问题:
- Task_High 进入 WAITING 状态,等待 Task_Low 设置事件
- Task_Low 执行时被 Task_Mid 抢占,Task_High 继续等待
- Task_High 的阻塞时间不可控
解决方案:
- 使用 Resource 机制保护任务间通信
- 为 Task_Low 分配高优先级,在设置事件后立即恢复原优先级
- 使用 Alarm 触发事件而非任务
死锁预防与检测
虽然 AUTOSAR OS 在资源互斥中提供了免死锁机制,但事件机制仍可能导致死锁。
死锁场景:
- Task_A 等待 Task_B 设置的 Event_1
- Task_B 等待 Task_A 设置的 Event_2
- 两个任务相互等待,形成循环依赖
代码示例(错误) :
/* Task A */
TASK(Task_A) {
WaitEvent(Event_FromB); /* 等待 Task_B 设置的事件 */
SetEvent(Task_B, Event_FromA);
}
/* Task B */
TASK(Task_B) {
WaitEvent(Event_FromA); /* 等待 Task_A 设置的事件 */
SetEvent(Task_A, Event_FromB);
}
死锁预防策略:
- 事件等待图分析:绘制任务间事件依赖图,检查是否存在循环
- 使用基本任务替代扩展任务:避免多任务事件依赖
- 引入超时机制:使用 Alarm 监控事件等待时间
超时监控示例:
TASK(Task_WaitWithTimeout) {
EventMaskType events;
uint32_t timeoutCounter = 0;
/* 设置超时 Alarm */
SetRelAlarm(Alarm_Timeout, 1000, 0); /* 100 ticks 后超时 */
while (TRUE) {
/* 等待事件或超时事件 */
WaitEvent(Event_Ready | Event_Timeout);
GetEvent(Task_WaitWithTimeout, &events);
if (events & Event_Timeout) {
ClearEvent(Event_Timeout);
/* 超时处理逻辑 */
HandleTimeout();
break;
} else if (events & Event_Ready) {
ClearEvent(Event_Ready);
CancelAlarm(Alarm_Timeout);
/* 正常处理逻辑 */
ProcessEvent();
break;
}
}
TerminateTask();
}
真实工程经验与踩坑总结
1. 未清除事件导致重复触发
错误现象:扩展任务进入无限循环,每次 WaitEvent() 立即返回,无法进入 WAITING 状态。
原因分析:
- 第一次事件触发后,任务正确处理
- 未调用
ClearEvent()清除事件标志 - 下次调用
WaitEvent()时事件仍然处于设置状态,立即返回
错误代码示例:
TASK(ExtendedTask_CanRx) {
while (TRUE) {
WaitEvent(Event_CanRxFrame); /* 第一次正常等待 */
/* 处理 CAN 帧 */
ProcessCanFrame();
/* 错误:未清除事件,下次 WaitEvent 立即返回 */
/* ClearEvent(Event_CanRxFrame); // 应该添加此行 */
}
}
正确做法:
- 在
WaitEvent()返回后立即调用GetEvent()获取事件掩码 - 处理完事件后调用
ClearEvent()清除所有已处理的事件 - 使用
GetEvent()+ClearEvent()组合确保事件正确清除
正确代码示例:
TASK(ExtendedTask_CanRx) {
EventMaskType events;
while (TRUE) {
WaitEvent(Event_CanRxFrame);
/* 获取事件 */
GetEvent(ExtendedTask_CanRx, &events);
/* 清除事件 */
ClearEvent(events);
/* 处理 CAN 帧 */
ProcessCanFrame();
}
}
2. 在持有资源时调用 WaitEvent
错误现象:调用 WaitEvent() 返回 E_OS_RESOURCE 错误,任务继续执行而未进入 WAITING 状态。
原因分析:
- 任务调用
GetResource()获取了资源 - 在未释放资源的情况下调用
WaitEvent() - AUTOSAR OS 禁止持有资源的任务进入 WAITING 状态,可能导致死锁或优先级反转
错误代码示例:
TASK(ExtendedTask_DataProcessing) {
EventMaskType events;
/* 获取资源 */
GetResource(Res_SharedBuffer);
/* 处理数据 */
ProcessData();
/* 错误:持有资源时调用 WaitEvent */
WaitEvent(Event_NewData); /* 返回 E_OS_RESOURCE,未进入 WAITING */
ReleaseResource(Res_SharedBuffer);
}
正确做法:
- 在调用
WaitEvent()前释放所有持有的资源 - 使用
GetEvent()+ClearEvent()检查是否已有事件发生 - 重新设计代码结构,避免在持有资源时需要等待事件
正确代码示例:
TASK(ExtendedTask_DataProcessing) {
EventMaskType events;
/* 释放资源后再等待事件 */
ReleaseResource(Res_SharedBuffer);
/* 等待新数据事件 */
WaitEvent(Event_NewData);
/* 获取并清除事件 */
GetEvent(ExtendedTask_DataProcessing, &events);
ClearEvent(events);
/* 重新获取资源处理数据 */
GetResource(Res_SharedBuffer);
ProcessData();
ReleaseResource(Res_SharedBuffer);
}
3. 为 SUSPENDED 任务设置事件
错误现象:调用 SetEvent() 返回 E_OS_STATE 错误,事件未成功设置。
原因分析:
- 目标任务处于 SUSPENDED 状态(尚未激活或已终止)
SetEvent()无法为 SUSPENDED 任务设置事件- 任务状态在调用
SetEvent()前未被检查
错误代码示例:
ISR2(Can_Rx_Handler) {
uint8_t can_id = Can_ReadId();
/* 错误:未检查任务状态,直接设置事件 */
SetEvent(Task_CanRx, Event_CanRxFrame); /* 若 Task_CanRx 处于 SUSPENDED,返回 E_OS_STATE */
}
正确做法:
- 使用
GetTaskState()检查目标任务状态 - 为扩展任务配置自动启动(Autostart),确保任务在系统启动时进入 READY 状态
- 使用
ActivateTask()激活 SUSPENDED 任务后再设置事件
正确代码示例(方式一:状态检查) :
ISR2(Can_Rx_Handler) {
TaskStateType taskState;
uint8_t can_id = Can_ReadId();
/* 检查任务状态 */
GetTaskState(Task_CanRx, &taskState);
if (taskState != SUSPENDED) {
/* 任务非 SUSPENDED 状态,可以设置事件 */
SetEvent(Task_CanRx, Event_CanRxFrame);
}
}
4. 中断中误用 WaitEvent
错误现象:在中断服务程序中调用 WaitEvent(),系统崩溃或进入未定义状态。
原因分析:
WaitEvent()只能在扩展任务中调用- ISR2 虽然可以调用
SetEvent(),但无法调用WaitEvent() - ISR 中等待事件会导致中断阻塞,违反实时性要求
错误代码示例:
ISR2(Can_Rx_Handler) {
/* 错误:ISR 中调用 WaitEvent */
WaitEvent(Event_CanTxComplete); /* 非法调用 */
}
正确做法:
- ISR 中只能调用
SetEvent()通知任务 - 任务负责调用
WaitEvent()等待事件 - 使用双缓冲或队列机制处理中断数据
正确代码示例:
/* ISR 中仅设置事件 */
ISR2(Can_Rx_Handler) {
/* 保存 CAN 帧到缓冲区 */
CanBuffer_SaveFrame(receivedFrame);
/* 通知任务处理 */
SetEvent(Task_CanRx, Event_NewFrame);
}
/* 任务中等待事件 */
TASK(Task_CanRx) {
EventMaskType events;
while (TRUE) {
/* 等待新帧事件 */
WaitEvent(Event_NewFrame);
/* 获取并清除事件 */
GetEvent(Task_CanRx, &events);
ClearEvent(events);
/* 处理 CAN 帧 */
CanFrame frame = CanBuffer_GetFrame();
ProcessCanFrame(frame);
}
}
5. 事件丢失
错误现象:事件触发后任务未响应,事件似乎丢失了。
原因分析:
- 事件被多次设置,但任务仅处理一次
- 任务在处理事件时,新事件到来但未被捕获
- 未正确处理事件掩码中的多个事件
错误代码示例:
TASK(ExtendedTask_DataProcessor) {
EventMaskType events;
while (TRUE) {
WaitEvent(Event_DataReady);
/* 错误:仅获取事件一次 */
GetEvent(ExtendedTask_DataProcessor, &events);
/* 处理数据(耗时较长) */
ProcessData(); /* 耗时 10ms */
/* 在此期间,可能有新事件到来,但被忽略 */
ClearEvent(Event_DataReady);
}
}
正确做法:
- 在处理数据前保存事件掩码
- 处理数据后再次检查是否有新事件
- 使用循环处理所有待处理事件
正确代码示例:
TASK(ExtendedTask_DataProcessor) {
EventMaskType events;
while (TRUE) {
WaitEvent(Event_DataReady);
/* 持续处理所有事件 */
do {
/* 获取当前事件 */
GetEvent(ExtendedTask_DataProcessor, &events);
if (events & Event_DataReady) {
/* 清除已获取的事件 */
ClearEvent(Event_DataReady);
/* 处理数据 */
ProcessData();
}
} while (events & Event_DataReady); /* 检查是否有新事件 */
}
}
6. 优先级配置不当导致实时性丧失
错误现象:高优先级任务等待低优先级任务的事件,响应延迟过大。
原因分析:
- 高优先级扩展任务进入 WAITING 状态
- 低优先级任务负责设置事件,但被中优先级任务抢占
- 高优先级任务的阻塞时间不可控
解决策略:
- 为设置事件的任务分配高优先级(在设置事件时临时提升)
- 使用 Resource 保护事件设置(优先级天花板协议)
- 使用 Alarm 替代任务设置事件(Alarm 不受任务优先级影响)
Resource 保护示例:
/* 定义专用资源用于事件通信 */
<OsResource>
<OsResourceName>Res_EventComm</OsResourceName>
<OsResourceCeilingPriority>15</OsResourceCeilingPriority>
</OsResource>
/* 低优先级任务设置事件时获取资源 */
TASK(Task_LowPriority) {
GetResource(Res_EventComm); /* 优先级提升至 15 */
/* 执行关键操作 */
SetEvent(Task_HighPriority, Event_Ready);
ReleaseResource(Res_EventComm); /* 恢复原优先级 */
TerminateTask();
}
7. 多任务等待同一事件时的广播误解
错误现象:认为调用一次 SetEvent() 可以通知所有等待该事件的任务。
原因分析:
- AUTOSAR OS 事件机制不支持广播
- 每个任务拥有独立的事件 ECB
- 必须为每个任务单独调用
SetEvent()
错误代码示例:
ISR2(Can_Rx_Handler) {
/* 错误:认为此调用会通知所有等待 Event_NewFrame 的任务 */
SetEvent(Task_A, Event_NewFrame); /* 仅通知 Task_A */
/* Task_B 和 Task_C 也会等待 Event_NewFrame,但不会收到通知 */
}
正确做法:
- 为每个等待的任务单独调用
SetEvent() - 使用循环或位运算设置多个任务的事件
- 考虑使用 RTE 的 Sender-Receiver 机制替代事件广播
正确代码示例:
ISR2(Can_Rx_Handler) {
/* 为每个等待的任务单独设置事件 */
SetEvent(Task_A, Event_NewFrame);
SetEvent(Task_B, Event_NewFrame);
SetEvent(Task_C, Event_NewFrame);
}
总结
AUTOSAR OS 事件机制在汽车电子系统中的核心价值体现在三个维度:
1. 轻量级任务间通信
相比于信号量、消息队列等传统同步机制,事件机制具有显著优势:
| 机制 | 数据传输 | 内存开销 | 延迟 | 适用场景 |
|---|---|---|---|---|
| 事件(Event) | ❌ 无 | 极小(几字节) | 极低 | 状态通知、触发信号 |
| 信号量(Semaphore) | ❌ 无 | 小(4-8 字节) | 低 | 资源计数、互斥 |
| 消息队列(Queue) | ✅ 有 | 大(缓冲区大小) | 高 | 数据传递、缓存 |
事件机制仅传递二进制信号,无需数据拷贝,延迟通常 < 1μs,非常适合高频触发的状态通知场景(如 CAN 帧接收、传感器数据更新)。
2. 事件驱动架构支持
事件机制是构建事件驱动架构的基础,能够实现:
- 状态机解耦:状态机逻辑与触发源解耦,触发源可以是任务、ISR、Alarm 或调度表
- 多触发源支持:通过多事件等待机制,支持分支状态机
- 异步响应:任务可以在 WAITING 状态等待事件,释放 CPU 资源
3. 系统实时性保障
事件机制通过以下方式保障系统实时性:
- 有界等待时间:事件的设置和获取开销极小且可预测
- 优先级感知调度:事件触发后,高优先级任务立即进入 READY 状态
- 无阻塞机制:
SetEvent()不会阻塞调用者(任务或 ISR)
4. 与 AUTOSAR RTE 的无缝集成
事件机制与 AUTOSAR RTE(Runtime Environment)紧密集成,支持:
- Runnable 实体触发:RTE 可将 SWC 的 Runnable 实体映射到扩展任务的事件
- Sender-Receiver 通信:RTE 的数据接收可触发事件,通知任务处理
- Mode-Switch 支持:模式切换时自动触发事件,通知相关任务
结语
深入理解 AUTOSAR OS 事件机制是掌握扩展任务和事件驱动架构的关键。事件机制通过轻量级二进制信号实现任务间异步通信,支持构建灵活的状态机和事件驱动系统,在汽车电子 ECU 中具有不可替代的价值。
在实际工程中,正确使用 SetEvent()、WaitEvent()、GetEvent() 和 ClearEvent() 四个核心 API,合理设计事件等待策略(单事件、多事件、状态机),避免未清除事件、持有资源等待、中断中误用等常见错误,能够显著提升系统的实时性、可靠性和可维护性。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 25
25 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)