CRV与Hesai雷达的LeGO-LOAM建图实战
本文介绍了CRV调试中采用Docker+宿主机架构解决ROS版本兼容问题的方法,重点阐述了LeGO-LOAM算法在Hesai雷达上的适配过程。首先通过静态TF发布器建立雷达与车体坐标系的关系,随后详细说明了utility.h文件的关键参数修改和话题订阅调整。文章还提供了编译验证步骤、地图保存方法(包括.pcd文件生成与查看)以及轨迹提取技巧。
1. 前言
在CRV调试中,我采用 “Docker 跑驱动(Ubuntu 18.04) + 宿主机跑算法(Ubuntu 20.04)” 的架构,以解决 ROS 版本不兼容问题(crv底盘驱动依赖 Melodic,而算法依赖 Noetic)。
本文默认已满足以下前置条件:
-
网络已打通:Docker 容器已通过
--net=host模式启动,容器内的 Hesai 驱动与宿主机的roscore通信正常。 -
驱动已运行:在宿主机使用
rostopic list可以查看到雷达点云话题。 -
算法已下载:宿主机已 clone 了 LeGO-LOAM 代码包。
2. CRV TF 坐标系变换 (Static TF)
LeGO-LOAM 及其后的建图算法都需要维护一个正确的 TF 树。对于车辆底盘(CRV),我们通常以 后轮轴中心 作为基准坐标系 (base_link)。
2.1 测量数据准备
人工测量雷达相对于 CRV 后轮轴中心的 XYZ 偏移量。确认以下数据定义:
-
X轴:车头方向为正(前正后负)。
-
Y轴:车身左侧方向为正(左正右负)。
-
Z轴:垂直地面向上为正(上正下负)。
假设测量结果为: 雷达安装在后轴中心的前方 2.5 米,左右居中,距离地面高度 1.5 米。 即:x=2.5, y=0.0, z=1.5。
2.2 编写 TF 发布器
我们需要在算法启动前,发布一个静态坐标变换(Static Transform),将雷达坐标系挂载到车体坐标系上。
建议直接修改 LeGO-LOAM 的 run.launch 文件(位于 LeGO-LOAM/launch/run.launch),在 <launch> 标签内添加如下节点:
<launch>
<node pkg="tf" type="static_transform_publisher" name="base_link_to_lidar"
args="2.5 0.0 1.5 0 0 0 base_link hesai_lidar 100" />
</launch>原理解析: 这段代码告诉 ROS 系统:“雷达数据虽然是在 hesai_lidar 坐标系下产生的,但它固定在 base_link 前方 2.5米处。” 这样算法在进行运动补偿(IMU去畸变)和地图构建时,轨迹才会基于车辆后轴,而不是雷达中心。
3. 算法适配:针对 Hesai 雷达修改 LeGO-LOAM
LeGO-LOAM 原生支持 Velodyne VLP-16,对于 Hesai 雷达(尤其是多线束,如 32线/64线/128线),必须修改 utility.h 文件。
打开 LeGO-LOAM/include/utility.h:
3.1 关键参数修改
// 1. 修改雷达线束 (根据您的雷达型号)
// 建议:如果不需要极致精度,可在驱动层降采样输出,或者在此处配合 stride 使用。
extern const int N_SCAN = 128; // 假设您使用的是 Pandar XT-32,如果是128线请填128
// 2. 修改水平分辨率
// Hesai 雷达通常为 1800 或 2000,取决于您的驱动转速设置 (10Hz/20Hz)
extern const int Horizon_SCAN = 1800;
// 3. 修改垂直角度分辨率 (ang_res_y) 和 底部角度 (ang_bottom)
// 这是一个极其关键的步骤,必须查阅 Hesai 手册!
// 公式:ang_res_y = (垂直FOV范围) / (N_SCAN - 1)
// 示例 (Pandar XT-32): FOV是31度 (-16 ~ +15)
extern const float ang_res_y = 31.0 / 31.0; // 约等于 1.0
extern const float ang_bottom = 16.0; // 底部角度的绝对值(如果最下面是-16度,这里填16.0)
extern const int groundScanInd = 20; // 地面点检测阈值,线束越多,这个值可能需要适当调大我的hesai雷达是128线的,一般来说需要降采样,所以我直接把Hesai的数据格式转换成 Velodyne 的格式了。
3.2 话题订阅修改
在 imageProjection.cpp 中,修改订阅的话题名称:
// 原始代码
// subLaserCloud = nh.subscribe<sensor_msgs::PointCloud2>("/velodyne_points", 1, &ImageProjection::cloudHandler, this);
// 修改为 Docker 抛出 Hesai 转换成 Velodyne 的格式话题
subLaserCloud = nh.subscribe<sensor_msgs::PointCloud2>("/points_raw", 1, &ImageProjection::cloudHandler, this);4. 编译与验证
4.1 重新编译 (宿主机)
cd ~/catkin_ws # 进入工作空间
catkin_make -j4 # 重新编译
source devel/setup.bash4.2 联合调试步骤
-
Docker 端:启动雷达驱动。
-
宿主机端:启动 LeGO-LOAM。
-
Rviz 验证 (关键):
-
将 Fixed Frame 设置为
base_link。 -
添加 PointCloud2,选择
/laser_cloud_surround。 -
检查 TF 树:运行
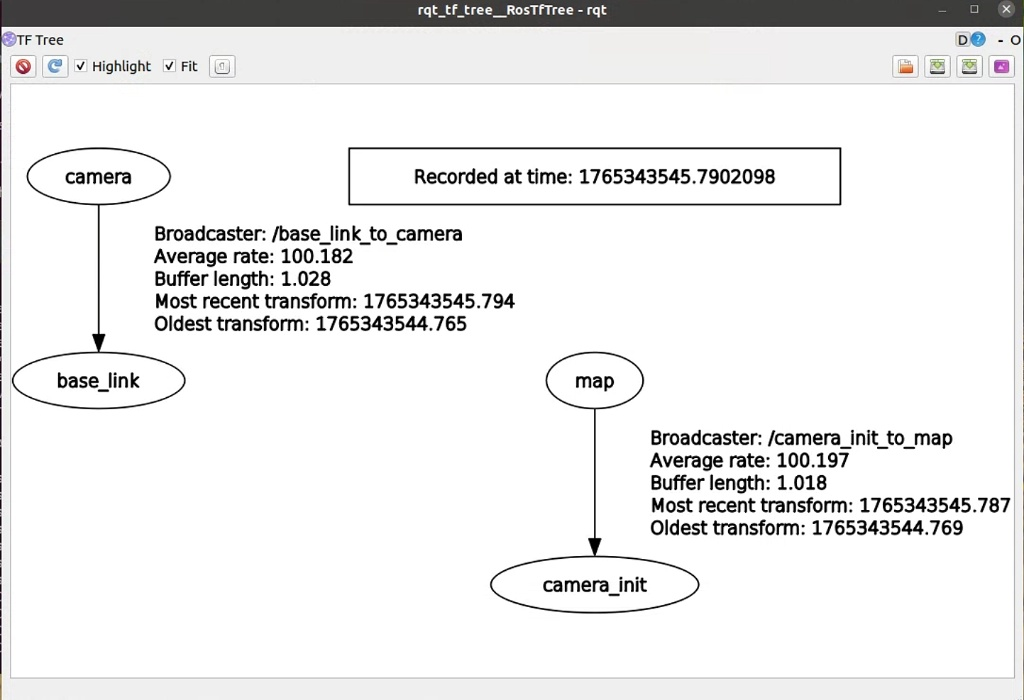
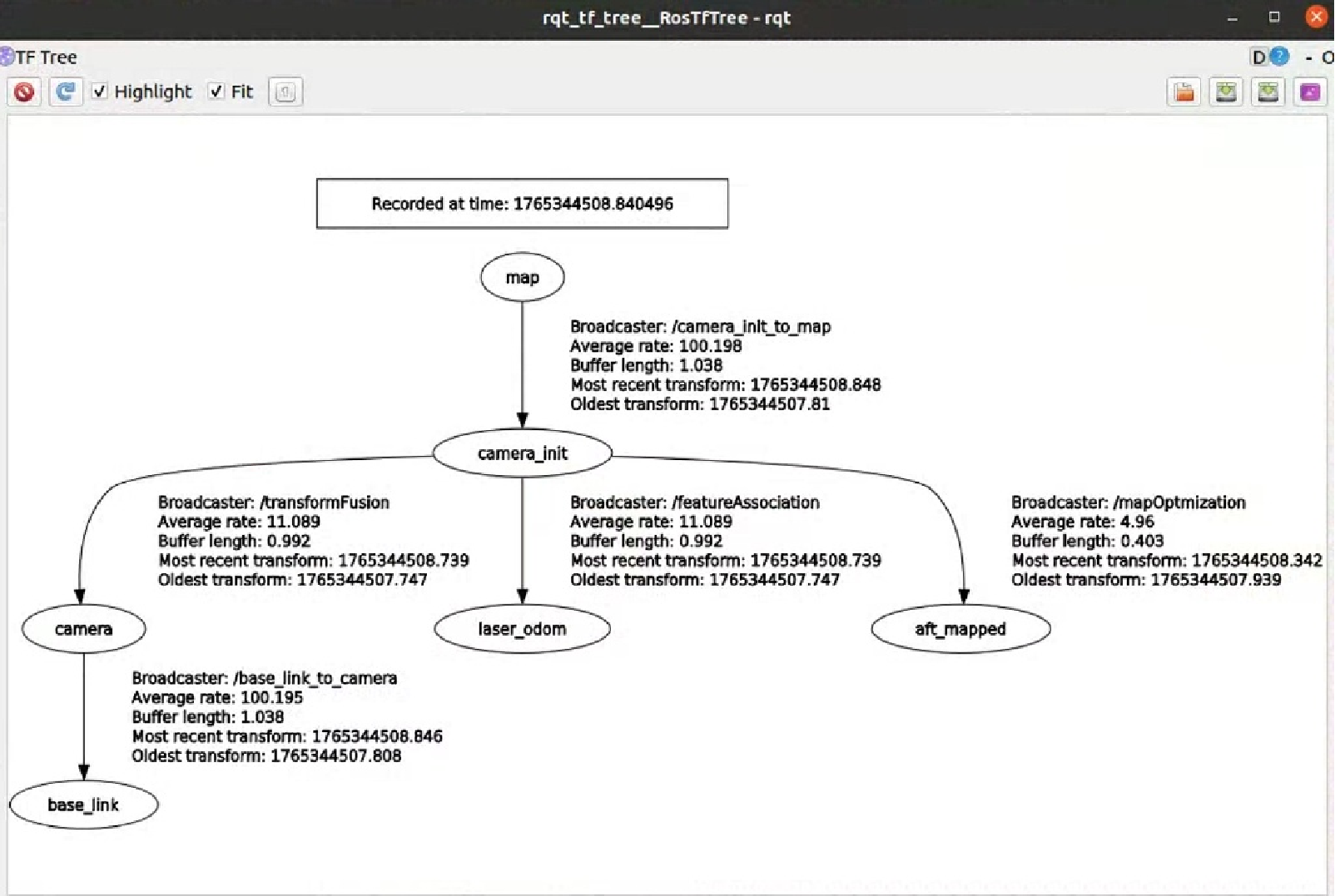
rosrun rqt_tf_tree rqt_tf_tree。 -
预期结果:应该能看到一条完整的链:
map->camera_init-> ... ->base_link->hesai_lidar。
下图分别是没连接成功的图和连接好的图:
5、LeGO-LOAM 建图后处理:地图保存、可视化与轨迹提取
1. 保存 3D 点云地图 (.pcd)
LeGO-LOAM 的全局地图话题通常是 /laser_cloud_surround。我们可以使用 pcl_ros 包来接收这个话题并保存文件。
在建图结束(跑完数据包或绕完一圈)且 ROS 节点尚未关闭 时,在宿主机打开一个新的终端,执行以下命令:
# 创建一个存放地图的文件夹
mkdir -p ~/map_output
cd ~/map_output
# 使用 pcl_ros 监听话题并保存
# input:= 后面跟的是 LeGO-LOAM 的全局地图话题
# _prefix:= 是保存文件的前缀
rosrun pcl_ros pointcloud_to_pcd input:=/laser_cloud_surround _prefix:=scans_操作技巧:
-
输入命令后,您会看到终端不断打印
Data saved to ...。 -
因为
/laser_cloud_surround是低频更新的(或者一直在发布),您只需要等它保存了一帧完整的地图后(通常几秒钟),即可按Ctrl+C停止。 -
查看文件夹,您会发现生成了
scans_xxxxx.pcd文件,文件最大的那个通常就是最终的完整地图。
当然也可以通过 Rosbag 录制来保存,但我觉得太麻烦了。
2. 查看与编辑地图
保存好的 .pcd 文件无法直接用图片浏览器打开,需要专业工具。
工具一:pcl_viewer (轻量级预览)
如果安装了 PCL 库(ROS 自带),可以直接在终端查看:
pcl_viewer ~/map_output/scans_xxxxx.pcd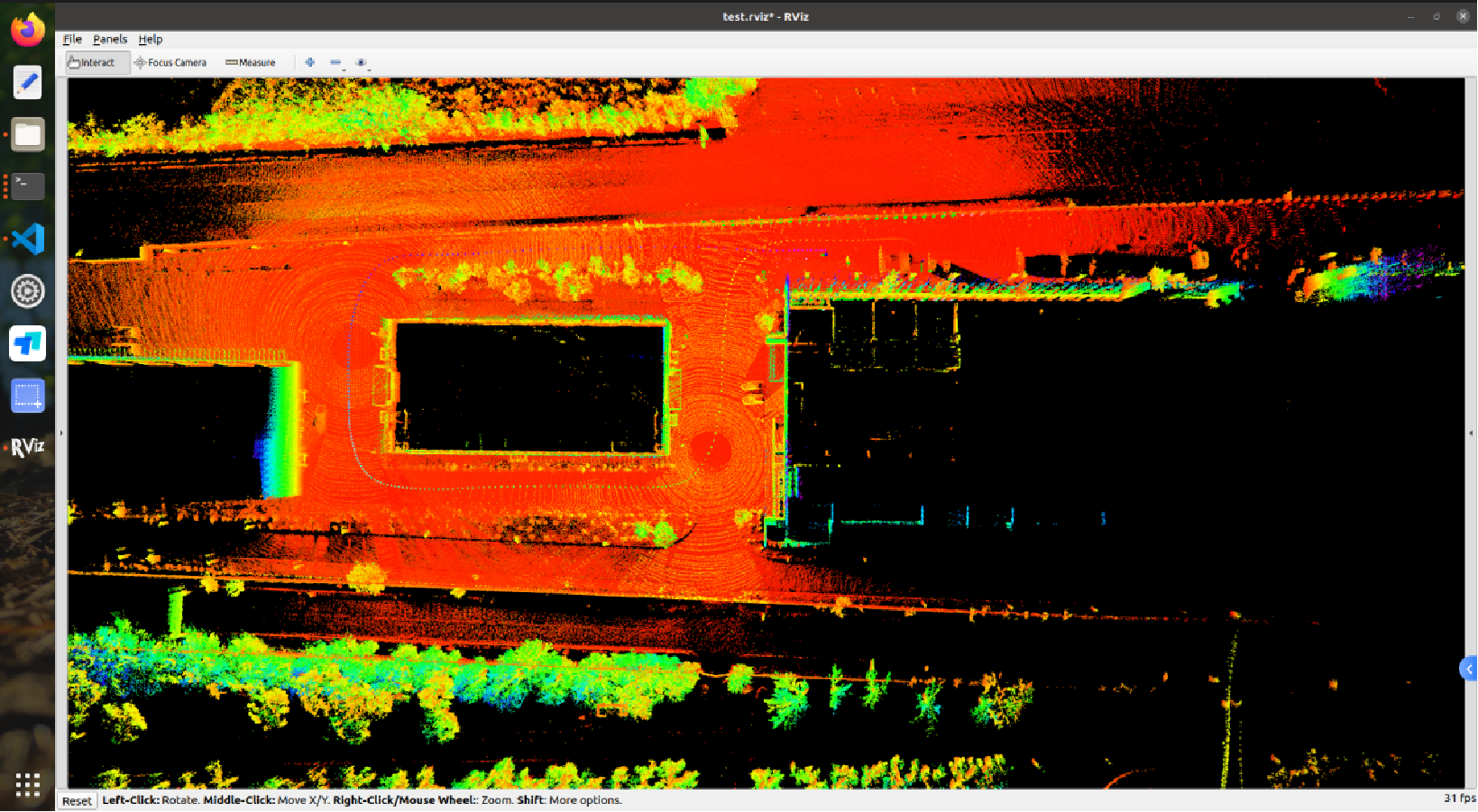
-
操作:鼠标左键旋转,滚轮缩放,Shift+左键拖动。
-
常用快捷键:按
u切换颜色模式(根据强度或高度),按r重置视角。
工具二:CloudCompare (科研/工程推荐)
这是处理点云的神器(Windows/Ubuntu 均有)。对于写论文或做标注来说,它比 pcl_viewer 强大太多。
功能:
-
裁剪:可以手动删在这个地图里出现的动态物体(如行人、路过的车)。
-
格式转换:可以把 .pcd 转成 .ply 或 .las。
-
渲染:可以生成非常漂亮的鸟瞰图用于论文配图。
3. 提取轨迹用于精度评估
作为研究人员,可能不仅要图,还要评估 SLAM 的精度(ATE/RPE)。LeGO-LOAM 在运行时通常会把轨迹数据输出到终端或特定目录下。
如果想用 evo 工具评估轨迹,建议修改 mapOptmization.cpp,在保存 keyframe pose 的地方添加一段代码,将其保存为 TUM 或 KITTI 格式的 .txt 文件。
或者,直接录制 /aft_mapped_to_init 话题:
rosbag record -O trajectory.bag /aft_mapped_to_init然后使用 evo 工具直接读取 bag 文件进行画图:
evo_traj bag trajectory.bag /aft_mapped_to_init --plot对于精度评估没写全,下次做实验的时候再仔细讲解一下吧。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 19
19 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)