ROS2核心概述(0)- 智能机器人开发环境配置、ROS2、YOLO部署测试
本文汇总了ROS、CUDA和YOLOv8的安装与部署教程。内容包括:1) Ubuntu20.04安装ROS Noetic和Ubuntu22.04配置ROS2的详细步骤;2) ROS2功能测试方法,包括通信机制验证和turtlesim仿真;3) VSCode远程开发环境配置;4) CUDA 11.2安装指南及路径配置;5) YOLOv8模型部署实践,涵盖环境搭建、模型量化(INT8/FP32转换)和
目录
【前言】: Ubuntu20.04.4安装ROS Noetic详细教程
【摘要】
本文汇总了ROS、CUDA和YOLOv8的安装与部署教程。内容包括:1) Ubuntu20.04安装ROS Noetic和Ubuntu22.04配置ROS2的详细步骤;2) ROS2功能测试方法,包括通信机制验证和turtlesim仿真;3) VSCode远程开发环境配置;4) CUDA 11.2安装指南及路径配置;5) YOLOv8模型部署实践,涵盖环境搭建、模型量化(INT8/FP32转换)和香橙派AI Pro开发板应用案例。提供了相关技术文档链接和常见问题解决方案,适合AI和机器人开发者参考。
【前言】: Ubuntu20.04.4安装ROS Noetic详细教程
https://zhuanlan.zhihu.com/p/515361781![]() https://zhuanlan.zhihu.com/p/515361781
https://zhuanlan.zhihu.com/p/515361781
1. ROS2 Ubuntu22.04安装与配置
1.1 ROS安装(鱼香肉丝一键安装)
参考链接:动手安装ROS2
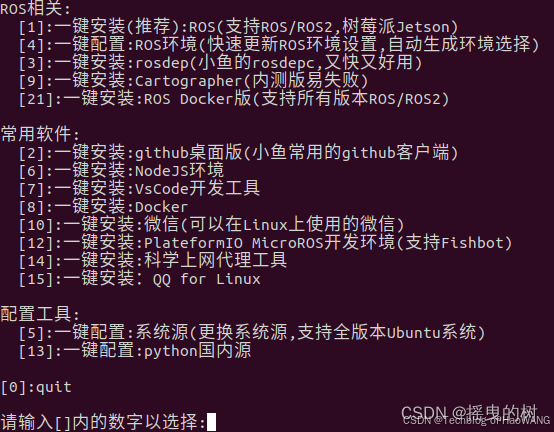
执行下面的命令,然后按照脚本指示文件操作即可:
wget http://fishros.com/install -O fishros && . fishros
【ROS2】MOMO的鱼香ROS2(二)ROS2入门篇——ROS2初体验-CSDN博客
选择
[1]:一键安装(推荐):ROS(支持ROS/ROS2,树莓派Jetson)
[1]:更换系统源再继续安装
[2]:更换系统源并清理第三方源
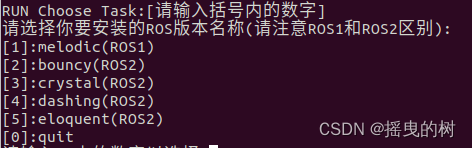
[5]:eloquent(ROS2)
[1]:eloquent(ROS2)桌面版
1.2 ROS2测试
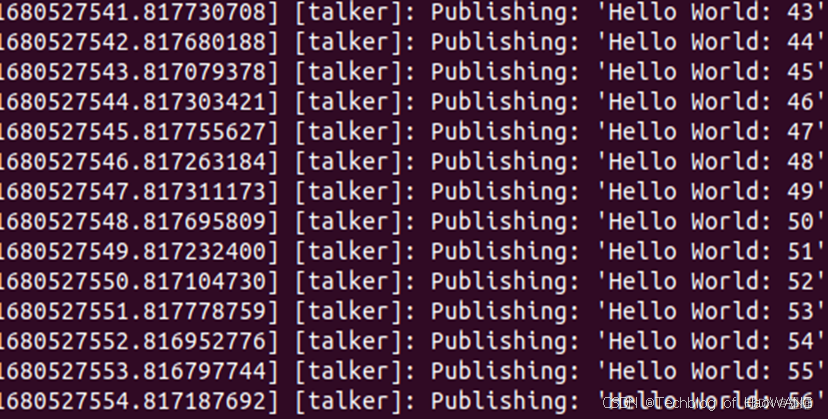
测试cpp和python接口之间的通讯机制是否完整(cpp和python是ROS2自带的接口)
首先输入如下指令:
ros2 run demo_nodes_cpp talker把cpp当作发布者,会输出"Hello world" 如图所示
再打开一个新的终端,输入下列指令:
ros2 run demo_nodes_python listener把python当作订阅者,用来接收cpp所发送的数据,输出结果如下图
可以看到两个终端的输出结果字符串"Hello world"同步进行,说明通信系统没问题。
(demo_nodes 是ros2自带的功能包,在终端中输入ros2 run demo_nodes时按Tab键会自动补全指令,下面会出现在当前功能包下的所有可用文件。)
(2)最后再测试一下经典小孩过仿真示例
输入指令:
ros2 run turtlesim turtlesim_node回车后会启动一个蓝色背景的海归仿真器,如图
再开一个新的终端,再终端中输入下列代码:
ros2 run turtlesim turtle_teleop_key回车后会启动一个键盘控制节点,如图所示:
之后用鼠标光标选中这个新的终端,然后就可以通过键盘来控制小海龟的移动,如图:
2. ROS2 开发工具
2.1 VScode SSH 远程开发环境配置
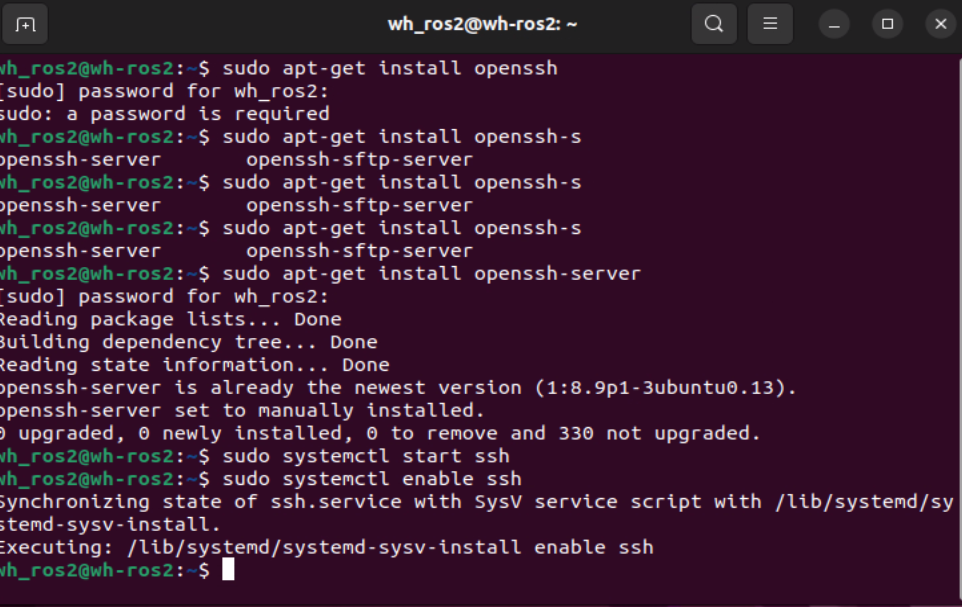
ROS2服务端主机配置如下:
sudo apt update sudo apt install openssh-server sudo systemctl start ssh sudo systemctl enable ssh
获取ip地址:
ifconfig -a
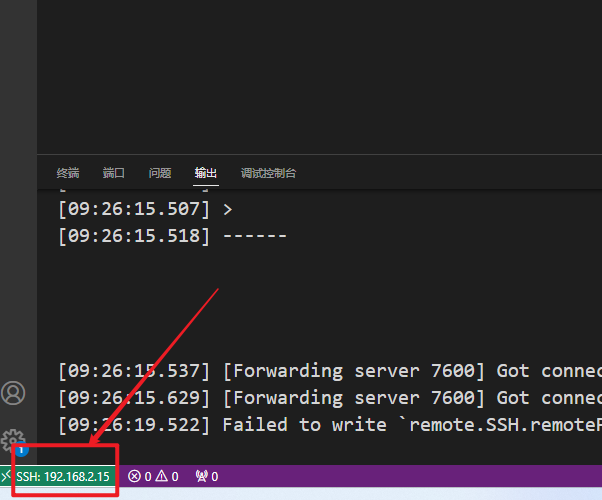
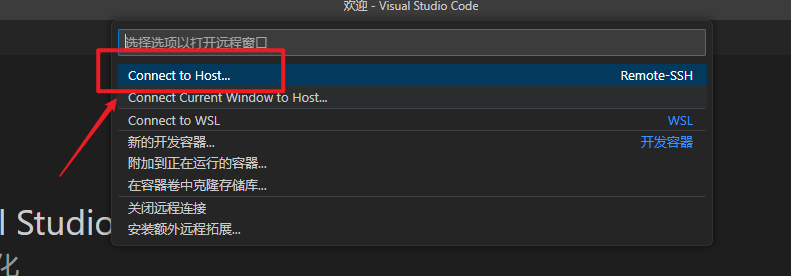
Windows开发主机VScode IDE配置:
1.打开SSH
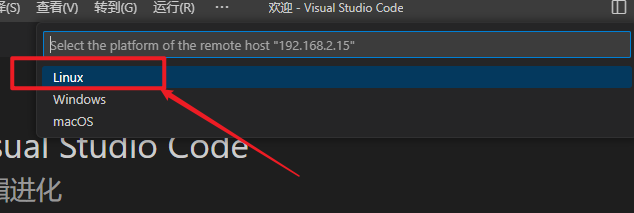
2. 配置IP:ssh XXX@ip -A
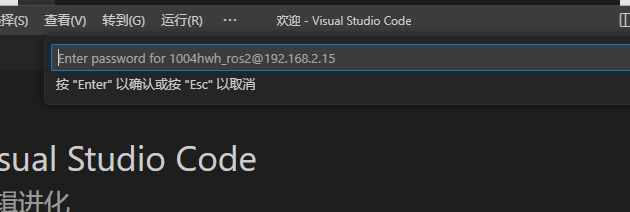
3. linux参数配置、选择默认config文件、输入密码
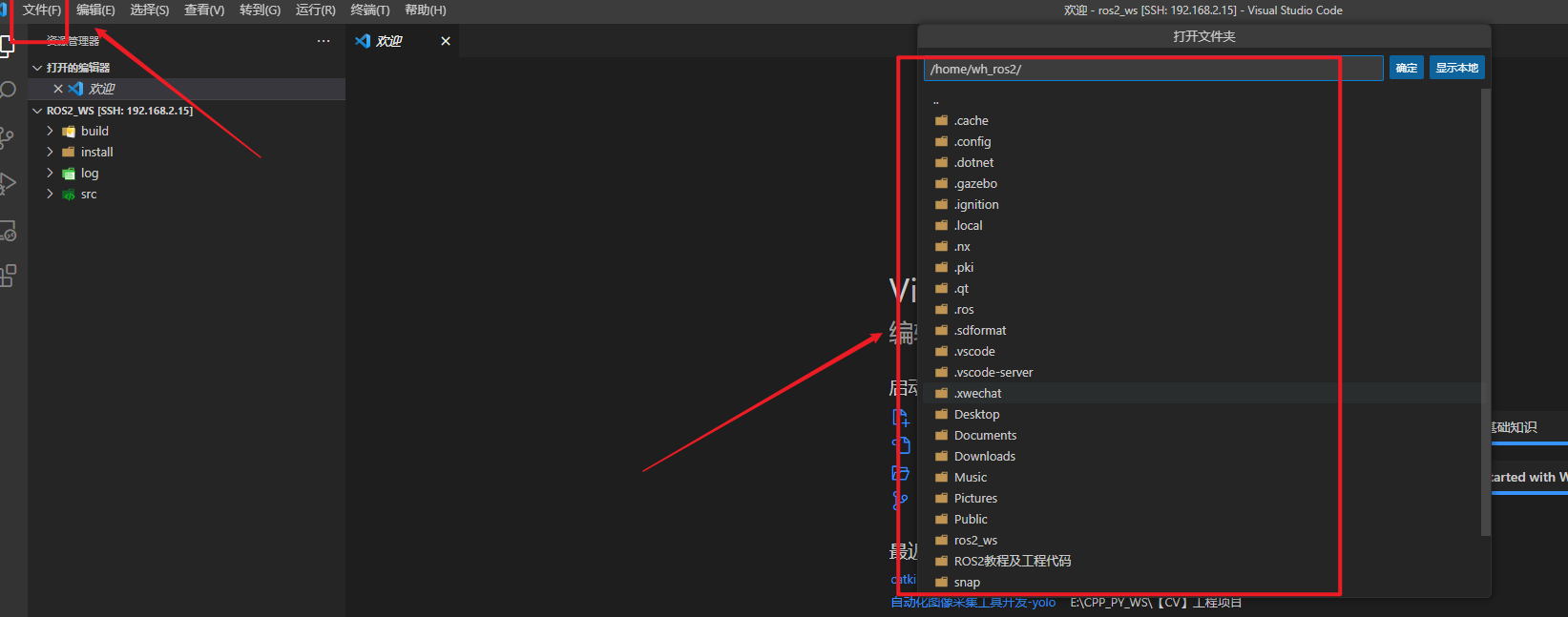
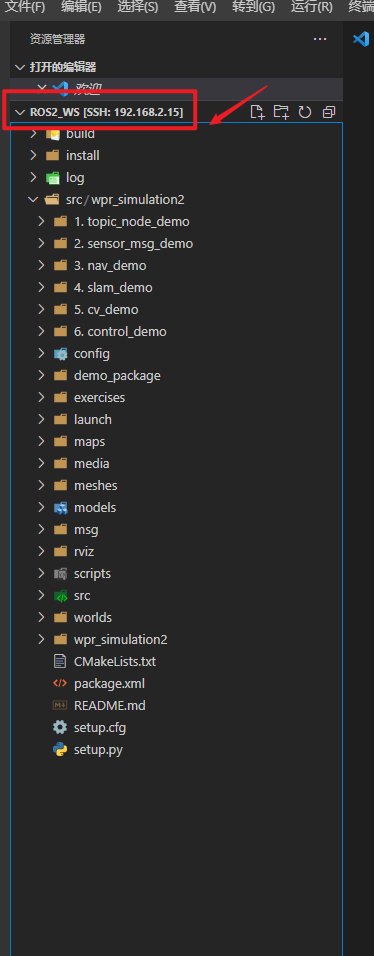
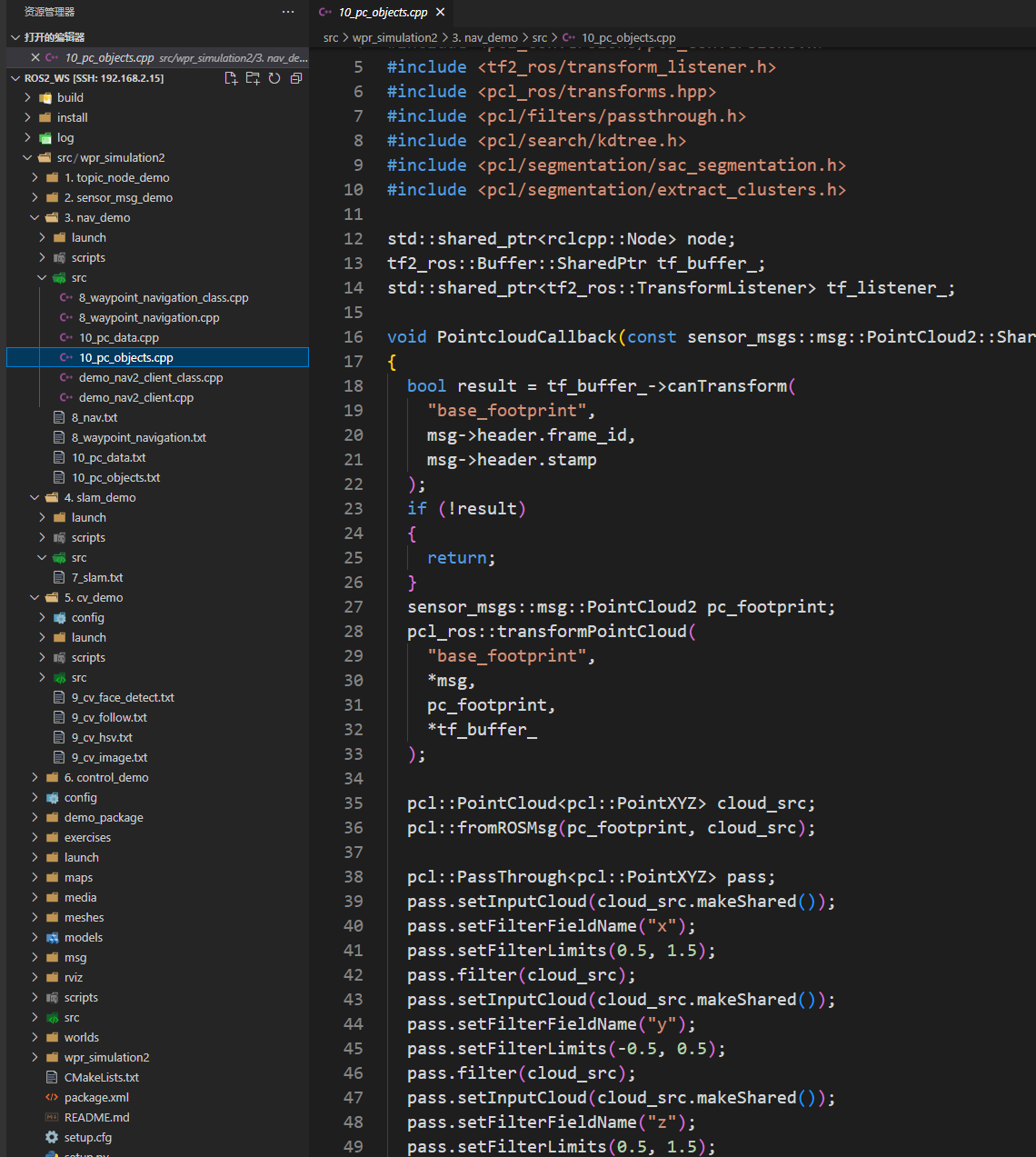
3. 进入远程文件夹
2.2 usb-camera
ROS学习笔记(四):使用 `ros2 run usb_cam usb_cam_node_exe` 启动 USB 摄像头_ros2 运行摄像头-CSDN博客
3. CUDA 11.2
官方链接及安装过程参考:
CUDA Toolkit 11.2 Downloads | NVIDIA Developer![]() https://developer.nvidia.com/cuda-11.2.0-download-archive?target_os=Linux&target_arch=x86_64&target_distro=Ubuntu&target_version=2004&target_type=runfilelocalUbuntu 18.04安装CUDA和cuDNN - 知乎 (zhihu.com)
https://developer.nvidia.com/cuda-11.2.0-download-archive?target_os=Linux&target_arch=x86_64&target_distro=Ubuntu&target_version=2004&target_type=runfilelocalUbuntu 18.04安装CUDA和cuDNN - 知乎 (zhihu.com)![]() https://zhuanlan.zhihu.com/p/72298520Ubuntu 安装CUDA_ubuntu安装cuda-CSDN博客文章浏览阅读2w次,点赞55次,收藏181次。可以发现,我这里的NVIDIA显卡驱动版本是 470.141.03,这里可以看到本机最高支持 cuda 11.4 ,也就是说11.4之下的CUDA版本该显卡都可以支持,11.4之上的则不支持。通过上表可以发现,由于自己的NVIDIA显卡驱动版本是 470.141.03,所以自己电脑显卡支持的版本CUDA 11.4及之下。后,终端就会跳出选择界面,回到正常终端模式,并且没有用任何提示。这是正常现象,等待安装完成即可。所以需要根据已有的显卡驱动版本,去。(以CUDA11.4为例)_ubuntu安装cuda
https://zhuanlan.zhihu.com/p/72298520Ubuntu 安装CUDA_ubuntu安装cuda-CSDN博客文章浏览阅读2w次,点赞55次,收藏181次。可以发现,我这里的NVIDIA显卡驱动版本是 470.141.03,这里可以看到本机最高支持 cuda 11.4 ,也就是说11.4之下的CUDA版本该显卡都可以支持,11.4之上的则不支持。通过上表可以发现,由于自己的NVIDIA显卡驱动版本是 470.141.03,所以自己电脑显卡支持的版本CUDA 11.4及之下。后,终端就会跳出选择界面,回到正常终端模式,并且没有用任何提示。这是正常现象,等待安装完成即可。所以需要根据已有的显卡驱动版本,去。(以CUDA11.4为例)_ubuntu安装cudahttps://blog.csdn.net/str1ngthen/article/details/133793250CUDA路径配置参考(~/.bashrc CUDA PATH)
export PATH=$PATH:/home/-/cuda-11.2/bin/
export PATH=$PATH:/home/-/cuda-11.2/lib64/注意:输入source ~/.bashrc 报错dircolors\lesspipe: command not found解决方法
4. 部署YOLO V8
参考案例:
【 香橙派 AIpro评测】烧系统运行部署LLMS大模型跑开源yolov5物体检测并体验Jupyter Lab AI 应用样例(新手入门)_香橙派aipro集成yolov5-CSDN博客文章浏览阅读2.5k次,点赞16次,收藏26次。大家好,我是yma16,本期分享 【 香橙派 AIpro评测】烧系统到部署到体验 AI 应用样例:香橙派 AIpro烧系统到体验 AI 应用样例(新手福音)香橙派 AIproOrange Pi AI Pro 开发板是香橙派联合华为精心打造的高性能 AI 开发板,其搭载了昇腾 AI 处理器,可提供 8TOPS INT8 的计算能力,内存提供了 8GB 和 16GB两种版本。可以实现图像、视频等多种数据分析与推理计算,可广泛用于教育、机器人、无人机等场景。开发版图解。_香橙派aipro集成yolov5https://blog.csdn.net/qq_38870145/article/details/140389168?utm_medium=distribute.pc_relevant.none-task-blog-2~default~baidujs_baidulandingword~default-1-140389168-blog-140423506.235%5Ev43%5Epc_blog_bottom_relevance_base1&spm=1001.2101.3001.4242.2&utm_relevant_index=4YOLOv8 模型量化:动态量化&静态量化-CSDN博客文章浏览阅读785次,点赞4次,收藏9次。点击下方卡片,关注“小白玩转Python”公众号在当今世界,人工智能无处不在——从我们的智能手机到智能家居。但这些强大的AI模型如何适应如此小的设备?答案在于一种称为模型量化的技术。精致的AI设备可以放入口袋,持续工作数小时,并且不需要持续的互联网连接。这是量化正在创造的现实。在这篇博客文章中,我们将探索YOLO视觉模型的模型量化的艺术和科学。我们将了解这种技术如何使复杂的神经网络能够在资源有限的..._yolov8量化
https://blog.csdn.net/weixin_38739735/article/details/140727654YOLOv8模型ONNX格式INT8量化实战指南-百度开发者中心本文详细介绍了如何将YOLOv8模型从FP32格式转换为高效的INT8量化格式,利用ONNX Runtime进行量化操作,提升模型推理速度,适用于计算机视觉领域的实际应用。
![]() https://developer.baidu.com/article/details/3321909
https://developer.baidu.com/article/details/3321909
【YOLOV8】YOLOV8模型导出export参数说明



有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 24
24 0
0- 0



 已为社区贡献30条内容
已为社区贡献30条内容

所有评论(0)