微网两阶段鲁棒优化Matlab实现之旅
微网两阶段鲁棒优化matlab版采用CCG和kkt条件编制两阶段鲁棒优化程序,以储能、发电、风电和光伏容量作为第一阶段变量,以主体出力作为第二阶段变量,以负荷、风电和光伏出力作为不确定性变量,实现微网两阶段优化模型在微网系统的优化调度中,两阶段鲁棒优化是一种非常有效的策略。今天咱就来唠唠如何用Matlab实现基于CCG(Column - and - Constraint Generation)和K
微网两阶段鲁棒优化matlab版 采用CCG和kkt条件编制两阶段鲁棒优化程序,以储能、发电、风电和光伏容量作为第一阶段变量,以主体出力作为第二阶段变量,以负荷、风电和光伏出力作为不确定性变量,实现微网两阶段优化模型
在微网系统的优化调度中,两阶段鲁棒优化是一种非常有效的策略。今天咱就来唠唠如何用Matlab实现基于CCG(Column - and - Constraint Generation)和KKT条件的微网两阶段鲁棒优化程序。
变量设定
咱这里把储能、发电、风电和光伏容量当作第一阶段变量,就好比是打游戏一开始要决定好你的初始“装备”配置。假设我们用向量来表示这些变量,在Matlab里可以这样简单定义:
% 定义第一阶段变量
% 假设 num_gens 为发电设备数量,num_wind 为风机数量,num_pv 为光伏板数量,num_storage为储能数量
num_gens = 3;
num_wind = 5;
num_pv = 10;
num_storage = 2;
first_stage_vars = zeros(1, num_gens + num_wind + num_pv + num_storage);
% 这里简单初始化为0,实际应用中根据具体情况初始化这 firststagevars 向量里,前 numgens 个元素代表发电容量,接着 numwind 个代表风电容量,再往后 numpv 个是光伏容量,最后的 numstorage 个就是储能容量啦。
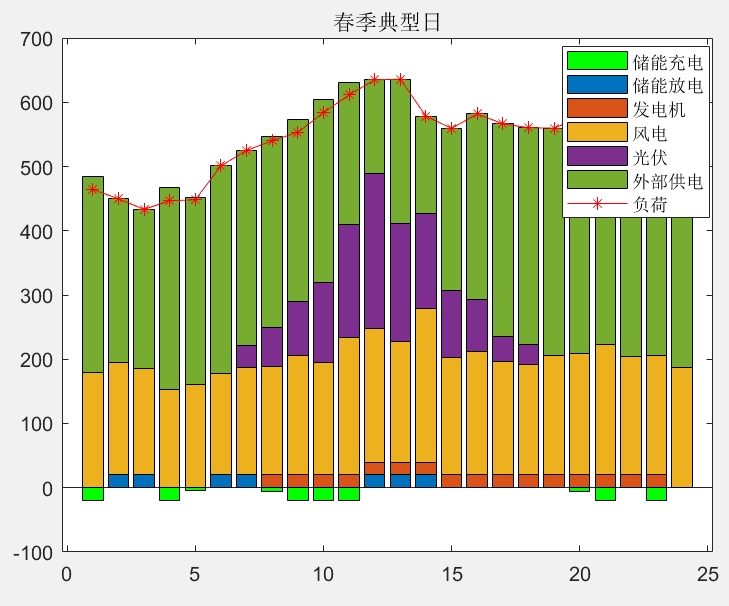
主体出力作为第二阶段变量,它是在第一阶段变量确定后,根据实时情况来进一步优化的。不确定性变量,也就是负荷、风电和光伏出力,它们像调皮的小精灵,在实际运行中会随机变化。
CCG与KKT条件在程序中的体现
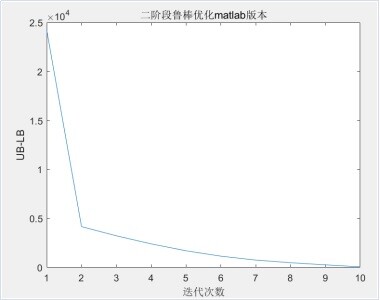
CCG算法核心思想是通过不断生成新的列(变量)和约束来逐步逼近最优解。在Matlab里,我们可以通过循环来实现这个过程。下面是一个简化的CCG框架代码示例:
% CCG框架示例
max_iter = 100; % 最大迭代次数
tolerance = 1e - 4; % 收敛容差
iter = 1;
while iter <= max_iter
% 求解主问题,这里用线性规划求解器示例
[obj_value, solution] = linprog(c, A, b, Aeq, beq, lb, ub);
% c是目标函数系数向量,A、b是不等式约束矩阵和向量,Aeq、beq是等式约束矩阵和向量,lb、ub是变量上下界
% 求解子问题,这里省略具体子问题定义
sub_obj_value = solve_subproblem(solution);
% 根据子问题结果生成新的列和约束添加到主问题中
[new_col, new_constraint] = generate_column_and_constraint(sub_obj_value);
A = [A; new_constraint];
b = [b; sub_obj_value];
% 判断是否收敛
if (some_convergence_criterion)
break;
end
iter = iter + 1;
end在这个代码里,每次迭代我们先求解主问题,然后根据主问题的解去求解子问题,再根据子问题结果生成新的列和约束添加到主问题中,不断重复这个过程直到满足收敛条件。
微网两阶段鲁棒优化matlab版 采用CCG和kkt条件编制两阶段鲁棒优化程序,以储能、发电、风电和光伏容量作为第一阶段变量,以主体出力作为第二阶段变量,以负荷、风电和光伏出力作为不确定性变量,实现微网两阶段优化模型
KKT条件则是优化问题的最优性条件,它在我们程序里用于确保求解的结果是真正的最优解。在实际代码中,我们可以利用KKT条件来构建约束和目标函数的修正项。例如,假设我们的目标函数是最小化成本,同时有一些功率平衡和设备容量限制等约束,利用KKT条件可以把这些约束以更合理的方式融入到目标函数中。
% 利用KKT条件构建目标函数修正项示例
% 假设已有目标函数系数向量c,不等式约束对偶变量lambda,等式约束对偶变量mu
kkt_term = lambda' * (A * first_stage_vars - b) + mu' * (Aeq * first_stage_vars - beq);
new_c = c + kkt_term;
% 这里new_c就是考虑KKT条件修正后的目标函数系数向量微网两阶段优化模型实现
结合上述的变量设定、CCG和KKT条件,我们就能构建微网两阶段优化模型。在第一阶段,我们要确定好各种设备的容量配置,第二阶段根据实时的不确定性变量(负荷、风电和光伏出力)来优化主体出力。以下是一个更完整的Matlab代码框架(省略了一些具体的参数计算和函数定义,实际使用中需补充完整):
% 微网两阶段鲁棒优化主程序框架
% 定义参数
% 例如负荷、风电、光伏出力的不确定性范围等参数
load_range = [100 300]; % 负荷功率范围
wind_power_range = [0 200]; % 风电功率范围
pv_power_range = [0 150]; % 光伏功率范围
% 初始化第一阶段变量
first_stage_vars = initialize_first_stage_vars();
% CCG循环
max_iter = 100;
tolerance = 1e - 4;
iter = 1;
while iter <= max_iter
% 求解第一阶段主问题
[first_stage_obj, first_stage_sol] = solve_first_stage_problem(first_stage_vars);
% 基于第一阶段解,考虑不确定性变量,求解第二阶段子问题
second_stage_obj = solve_second_stage_problem(first_stage_sol, load_range, wind_power_range, pv_power_range);
% 根据第二阶段结果,利用KKT条件生成新约束和变量添加到第一阶段问题
[new_col, new_constraint] = generate_column_and_constraint_using_kkt(second_stage_obj);
% 更新第一阶段问题的约束和变量
update_first_stage_problem(new_col, new_constraint);
% 判断是否收敛
if (convergence_check(first_stage_obj, second_stage_obj, tolerance))
break;
end
iter = iter + 1;
end
% 输出结果
disp(['最优第一阶段变量配置: ', num2str(first_stage_sol)]);
disp(['最优目标函数值: ', num2str(first_stage_obj + second_stage_obj)]);在这个框架里,我们先初始化第一阶段变量,然后通过CCG循环不断优化第一阶段和第二阶段的问题,最终得到满足条件的最优解,并输出结果。
通过以上Matlab实现,我们就可以在面对微网中不确定性因素时,通过两阶段鲁棒优化找到相对可靠的系统运行策略啦。当然,实际应用中还需要根据具体的微网系统特性,仔细调整参数和完善各个函数的定义,才能让这个优化模型发挥出最大的作用。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 16
16 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)