PRL:让大模型推理不再“开盲盒“——过程奖励学习的理论与实践
过程奖励学习(PRL)通过将稀疏的最终奖励分解为细粒度的过程奖励,显著提升了大语言模型的推理能力。该方法基于严格的数学推导,将未来期望收益与KL成本相结合,定义了每个推理步骤的过程奖励。PRL无需额外训练奖励模型或进行昂贵的蒙特卡洛搜索,可直接集成到现有GRPO框架中。实验表明,PRL不仅提高了平均推理准确率,还拓宽了模型的推理能力边界,为解决强化学习中的信用分配问题提供了高效且理论严谨的解决方案
PRL:让大模型推理不再"开盲盒"——过程奖励学习的理论与实践
论文标题: PRL: Process Reward Learning Improves LLMs’ Reasoning Ability and Broadens the Reasoning Boundary
作者: Jiarui Yao, Ruida Wang, Tong Zhang
机构: 伊利诺伊大学厄巴纳-香槟分校 (UIUC)
论文链接: https://arxiv.org/abs/2601.10201
🎯 一句话总结
PRL 把"只看结果"的强化学习改造成"边做边评"的模式,用严格的数学推导把稀疏的最终奖励"拆解"成每一步的过程奖励,让模型在推理过程中能获得更细粒度的反馈,从而既提升平均性能,又拓宽模型的推理能力边界。
📖 这篇论文在解决什么问题?
想象你在教一个小学生做数学应用题。传统的强化学习方法就像这样批改作业:只看最后答案对不对,对了给满分,错了零分。这种方式存在一个显而易见的问题——学生可能前面九步都做对了,最后一步算错,结果整道题拿零分;也可能前面乱写一通,最后碰巧蒙对了答案。
这就是当前大语言模型(LLM)推理训练面临的核心困境:结果奖励太稀疏,无法为多步推理提供有效指导。
信用分配问题:一个老生常谈的难题
这个问题在强化学习领域有个专业术语叫信用分配问题(Credit Assignment Problem, CAP)。最早可以追溯到1984年Sutton的论文《Temporal Credit Assignment in Reinforcement Learning》。
核心难题是:当你最后拿到一个奖励(或惩罚)时,怎么判断是哪一步决策导致了这个结果?
在LLM推理场景下,这个问题更加突出:
- 一道数学题可能需要10+步推理
- 每一步都可能出错
- 但奖励信号只在最后才给出
用博弈论的语言说,这就像**“三个和尚没水喝”**的困境:每个步骤都想"搭便车"(依赖其他步骤拿分),结果整体表现就很差。
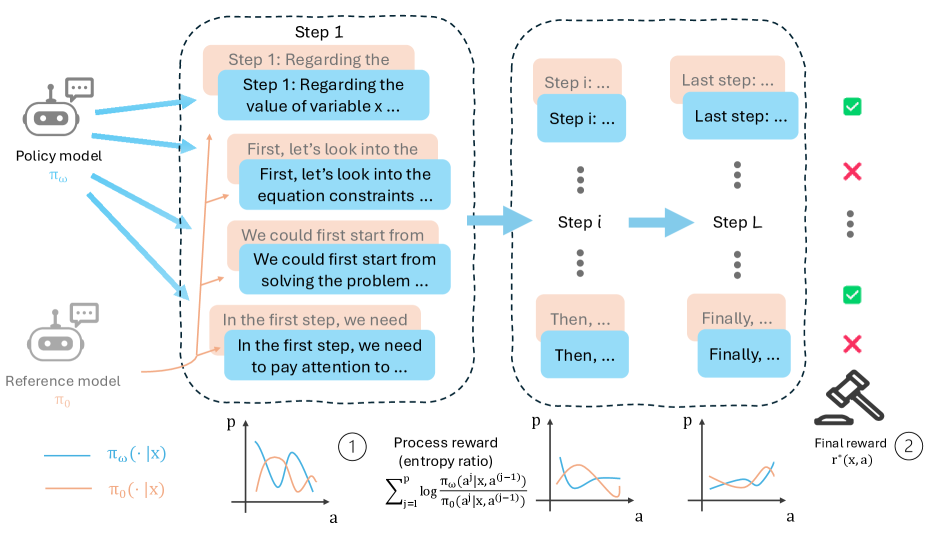
图1:PRL方法的核心思想——将最终奖励分解为每一步的过程奖励。策略模型和参考模型在每个推理步骤上的输出分布差异,被用来计算细粒度的过程信号。图中展示了从稀疏的结果奖励到密集的过程奖励的转变过程。
现有方案为什么不够好?
学术界当然意识到了这个问题,也有多种尝试:
1. MCTS(蒙特卡洛树搜索)方案
借鉴AlphaGo的思路,通过大量模拟来估计每一步的价值。OpenAI o1据传就用了类似的方法。
问题是——太贵了!每个训练样本都要跑成百上千次模拟,训练成本直接爆炸。假设每个问题需要100次模拟,每次生成500 token,那10万条训练数据就需要生成50亿token,光是推理成本就是天文数字。
2. 单独训练过程奖励模型(PRM)
谷歌DeepMind和OpenAI都在这条路上有深入研究。核心思路是:先训练一个专门评估中间步骤的模型,再用它来指导主模型。
谷歌最近提出的**过程优势验证器(PAV)**就是这个方向的代表作,通过全自动标注逐步骤奖励,在数学推理上提升了8%的准确率。
但这种方法有两个问题:
- 需要大量带步骤标注的数据:人工标注每一步的对错非常昂贵
- 多训一个模型本身就是额外负担:PRM的参数量往往也要到7B以上才能有好效果
3. 启发式方法
比如简单地把最终奖励平均分配给每一步,或者用某种衰减函数。
直觉上好像有道理,但缺乏理论支撑——凭什么这样分配是对的?会不会引入bias?
PRL的野心
PRL想要的是:既要理论严谨,又要工程简洁。
具体来说:
- ✅ 不需要MCTS的高昂计算开销
- ✅ 不需要单独训练PRM
- ✅ 有严格的数学推导支撑,不是拍脑袋设计
- ✅ 可以直接嵌入现有的GRPO训练框架
🧠 核心思想:从"结果导向"到"过程导向"
理论基础:熵正则化强化学习
PRL的出发点是一个经典的强化学习目标函数:
Q(π)=Ex[Ea∼π(⋅∣x)r∗(x,a)−1ηKL(π∥π0)]Q(\pi) = \mathbb{E}_x \left[ \mathbb{E}_{a \sim \pi(\cdot|x)} r^*(x,a) - \frac{1}{\eta} \text{KL}(\pi \| \pi_0) \right]Q(π)=Ex[Ea∼π(⋅∣x)r∗(x,a)−η1KL(π∥π0)]
翻译成人话就是:我们希望策略模型 π\piπ 生成的回答能拿到高分(第一项),但又不能跟原始模型 π0\pi_0π0 差太远(第二项的KL惩罚)。
这个KL惩罚项非常关键——它防止模型在追求高分的过程中"走火入魔",生成一些语法混乱但碰巧能拿高分的奇怪输出。这种现象在强化学习文献中叫reward hacking。
为什么需要KL正则化?
假设没有KL惩罚,模型可能会:
- 为了数学题得分,生成一堆无意义但包含正确答案的token
- 过度拟合训练集的格式,泛化能力变差
- 输出分布变得极端(熵降为0),失去多样性
有了KL惩罚后,模型必须在"拿高分"和"不离谱"之间找平衡。
最优策略的闭式解
作者证明了一个漂亮的结论(定理3.1):上述优化问题的最优解是:
π∗(a∣x)∝π0(a∣x)⋅eη⋅r∗(x,a)\pi^*(a|x) \propto \pi_0(a|x) \cdot e^{\eta \cdot r^*(x,a)}π∗(a∣x)∝π0(a∣x)⋅eη⋅r∗(x,a)
直觉上很好理解:最优策略应该在参考模型的基础上,根据奖励值进行"指数加权"——奖励高的回答应该被提升概率,奖励低的应该被压低。
这个结果和**DPO(Direct Preference Optimization)**中的Bradley-Terry模型有异曲同工之妙,都是在说:最优策略是参考策略乘以奖励的指数函数。
关键洞察:过程奖励的严格定义
接下来是这篇论文最精彩的部分。作者问了一个问题:如果我们只完成了部分推理步骤,应该给多少分?
假设完整答案是 a=[a1,a2,...,aL]a = [a_1, a_2, ..., a_L]a=[a1,a2,...,aL],部分答案是 a(ℓ)=[a1,...,aℓ]a^{(\ell)} = [a_1, ..., a_\ell]a(ℓ)=[a1,...,aℓ]。PRL定义的过程奖励是:
rℓ∗(x,a(ℓ))=Ea(−ℓ)∼π∗[r∗(x,a)−1η∑j=ℓ+1Llnπ∗(aj∣x,a(j−1))π0(aj∣x,a(j−1))]r_\ell^*(x, a^{(\ell)}) = \mathbb{E}_{a^{(-\ell)} \sim \pi^*} \left[ r^*(x,a) - \frac{1}{\eta} \sum_{j=\ell+1}^L \ln \frac{\pi^*(a_j|x, a^{(j-1)})}{\pi_0(a_j|x, a^{(j-1)})} \right]rℓ∗(x,a(ℓ))=Ea(−ℓ)∼π∗ r∗(x,a)−η1j=ℓ+1∑Llnπ0(aj∣x,a(j−1))π∗(aj∣x,a(j−1))
这个公式看起来吓人,但拆解一下很清晰:
| 组成部分 | 数学表达 | 直觉含义 |
|---|---|---|
| 未来期望收益 | Ea(−ℓ)∼π∗[r∗(x,a)]\mathbb{E}_{a^{(-\ell)} \sim \pi^*}[r^*(x,a)]Ea(−ℓ)∼π∗[r∗(x,a)] | 如果后面都按最优策略走,能拿多少分 |
| 未来KL成本 | 1η∑j=ℓ+1Llnπ∗(aj)π0(aj)\frac{1}{\eta} \sum_{j=\ell+1}^L \ln \frac{\pi^*(a_j)}{\pi_0(a_j)}η1∑j=ℓ+1Llnπ0(aj)π∗(aj) | 完成剩余步骤需要"偏离"参考模型多少 |
| 过程奖励 | 未来期望收益 - 未来KL成本 | 当前状态的"净价值" |
换句话说,过程奖励 = 未来期望收益 - 未来必须支付的成本。
为什么这个定义有效?
这个定义有一个重要的数学性质(定理3.3):状态一致性。
无论你从哪条路径走来,只要走到同一个中间状态,过程奖励都是一样的。数学上表述为:
rℓ∗(x,a(ℓ))=rℓ∗(x,a~(ℓ))if a(ℓ)=a~(ℓ)r_\ell^*(x, a^{(\ell)}) = r_\ell^*(x, \tilde{a}^{(\ell)}) \quad \text{if } a^{(\ell)} = \tilde{a}^{(\ell)}rℓ∗(x,a(ℓ))=rℓ∗(x,a~(ℓ))if a(ℓ)=a~(ℓ)
这个性质保证了训练信号的一致性——不会出现"同一个状态,不同的分数"的情况。
一个更直观的类比
用一个类比来解释:想象你在下围棋。
- 结果奖励:只有棋局结束才知道输赢,中间落子全靠蒙
- 过程奖励:每下一步,都有人告诉你"从这个局面出发,如果后面都下最优解,大概能赢/输多少目"
后者显然能提供更有效的学习信号。但问题是,围棋需要AlphaGo那样的价值网络来估计每一步的价值,而PRL的妙处在于:它用数学推导直接得出了过程奖励的计算公式,不需要额外训练任何模型。
🏗️ 方法架构:如何落地实现?
GRPO:一种高效的无Critic强化学习算法
在介绍PRL的具体实现之前,需要先了解它的基础框架——GRPO(Group Relative Policy Optimization)。
GRPO是DeepSeek团队在2024年提出的一种创新型强化学习算法,核心思想是:用组内样本的相对比较来计算优势,省去了训练Critic模型的麻烦。
传统PPO需要维护一个和Actor同等规模的Critic模型来估计状态价值,这在LLM场景下代价很高——你想训练一个7B的Actor,就得再配一个7B的Critic,显存直接翻倍。
GRPO的解法很聪明:
- 对同一个问题,生成G个不同的回答(比如G=8)
- 用奖励模型给每个回答打分
- 计算组内均值和标准差,做归一化:Ai=Ri−μσA_i = \frac{R_i - \mu}{\sigma}Ai=σRi−μ
- 用归一化后的优势更新策略
这样就完全不需要Critic了,显存省了一半,训练速度也快了不少。
| 特性 | PPO | GRPO |
|---|---|---|
| 是否需要Critic | 需要(同等规模) | 不需要 |
| 显存占用 | 高 | 低(约50%) |
| 训练稳定性 | 一般 | 较好(组内归一化) |
| 适用场景 | 通用RL | LLM微调 |
PRL在GRPO基础上的改进
PRL的关键改进是:把逐token的KL惩罚替换成了基于过程奖励的优势估计。
步骤1:采样多条推理轨迹
对于每个问题,让模型生成 nnn 条不同的推理路径(比如 n=5n=5n=5)。
trajectories = []
for _ in range(n):
traj = model.generate(question, do_sample=True, temperature=0.7)
trajectories.append(traj)
步骤2:计算每条轨迹的对数概率比
log_ratioj=logπω(aj∣x,a(j−1))π0(aj∣x,a(j−1))\text{log\_ratio}_j = \log \frac{\pi_\omega(a_j|x, a^{(j-1)})}{\pi_0(a_j|x, a^{(j-1)})}log_ratioj=logπ0(aj∣x,a(j−1))πω(aj∣x,a(j−1))
这衡量的是当前策略相对于参考模型在每一步的偏离程度。如果 log_ratioj>0\text{log\_ratio}_j > 0log_ratioj>0,说明当前策略比参考模型更倾向于这个token;反之亦然。
步骤3:计算"未来KL惩罚"
future_klℓ=∑j=ℓ+1Llog_ratioj\text{future\_kl}_\ell = \sum_{j=\ell+1}^L \text{log\_ratio}_jfuture_klℓ=j=ℓ+1∑Llog_ratioj
这是从步骤 ℓ\ellℓ 之后所有步骤的累积KL散度。注意这里用的是从当前位置到结尾的累积,而不是全局KL。
步骤4:计算过程优势
ρℓ=r∗(x,a)−1η⋅future_klℓ\rho_\ell = r^*(x, a) - \frac{1}{\eta} \cdot \text{future\_kl}_\ellρℓ=r∗(x,a)−η1⋅future_klℓ
把最终奖励和未来KL成本结合起来,得到每一步的过程优势。
注意一个有趣的性质:越靠前的步骤,future_kl越大,所以相对惩罚越重。这符合直觉——早期决策影响后续所有步骤,应该更谨慎。
步骤5:用过程优势更新策略
使用PPO风格的截断目标函数:
L(ω)=∑j=1Lmin{ρj⋅πωπold,ρj⋅clip(πωπold,1±ε)}\mathcal{L}(\omega) = \sum_{j=1}^L \min \left\{ \rho_j \cdot \frac{\pi_\omega}{\pi_{\text{old}}}, \rho_j \cdot \text{clip}\left( \frac{\pi_\omega}{\pi_{\text{old}}}, 1 \pm \varepsilon \right) \right\}L(ω)=j=1∑Lmin{ρj⋅πoldπω,ρj⋅clip(πoldπω,1±ε)}
截断(clip)机制是PPO的核心创新,防止单次更新步长过大导致训练崩溃。
步骤划分:一个被低估的细节
论文探讨了两种划分推理步骤的方式:
方式一:按换行符分割
把每个"思考段落"作为一步。比如:
Step 1: 设方程为 ax + b = c [一个步骤]
Step 2: 移项得 ax = c - b [一个步骤]
Step 3: 两边除以a,x = (c-b)/a [一个步骤]
优点是语义上比较自然,每一步是一个完整的推理动作。
方式二:按固定token长度分割
比如每256个token算一步,不管语义。
[token 0-255] → 步骤1
[token 256-511] → 步骤2
...
实验发现:固定长度分割在某些场景下表现更好!
为什么?论文分析了可能的原因:
| 分割方式 | 优点 | 缺点 |
|---|---|---|
| 换行符 | 语义清晰 | 步骤长度差异大(有的几个token,有的几百) |
| 固定长度 | 步骤长度一致 | 可能切断语义完整性 |
步骤长度差异太大会导致一个问题:短步骤的KL惩罚很小,长步骤的KL惩罚很大,这种不平衡可能影响学习信号的质量。
论文建议256 token是一个不错的平衡点——既不会太短导致无法捕捉完整推理,也不会太长导致信号稀疏。
🧪 实验结果:数字说话
实验设置
| 项目 | 配置 |
|---|---|
| 模型 | Qwen2.5-Math (1.5B, 7B)、Llama-3.2 (1B, 3B) |
| 训练数据 | NuminaMath数据集,约15万样本 |
| 评估基准 | MATH500, Minerva Math, Olympiad Bench, AIME24, AMC23 |
| 硬件 | 4张 Nvidia H100 GPU |
| 训练参数 | 学习率 1e-6,batch size 64,epoch 3 |
评估基准的难度梯度:
- MATH500:从MATH数据集中采样的500道题,中等难度
- Minerva Math:Google Minerva项目的数学测试集
- Olympiad Bench:奥林匹克竞赛级别的数学题
- AIME24:2024年美国数学邀请赛真题(最难)
- AMC23:2023年美国数学竞赛真题
主要结果
| 模型 | 方法 | MATH500 | Minerva | Olympiad | AIME24 | AMC23 | 平均 |
|---|---|---|---|---|---|---|---|
| Qwen2.5-Math-7B | GRPO | 84.70 | 37.60 | 48.17 | 33.33 | 67.50 | 54.26 |
| Qwen2.5-Math-7B | PRL | 85.10 | 38.20 | 48.53 | 36.67 | 67.50 | 55.20 |
| Qwen2.5-Math-1.5B | GRPO | 76.20 | 28.40 | 33.82 | 13.33 | 52.50 | 40.85 |
| Qwen2.5-Math-1.5B | PRL | 77.00 | 29.80 | 34.44 | 16.67 | 55.00 | 42.58 |
| Llama-3.2-3B | GRPO | 57.10 | 13.40 | 16.30 | 0 | 22.50 | 21.86 |
| Llama-3.2-3B | PRL | 57.60 | 15.00 | 16.59 | 3.33 | 22.50 | 23.00 |
| Llama-3.2-1B | GRPO | 38.60 | 7.80 | 8.96 | 0 | 12.50 | 13.57 |
| Llama-3.2-1B | PRL | 40.20 | 8.60 | 9.85 | 0 | 15.00 | 14.73 |
表1:Pass@8 指标对比(即采样8次,只要有一次对就算对)
几个值得注意的发现:
1. PRL在几乎所有配置上都优于GRPO基线
唯一打平的是AMC23上的Qwen2.5-Math-7B,其他全部有提升。
2. 难题上提升更明显
AIME24是最难的竞赛级题目,Qwen2.5-Math-7B从33.33%提升到36.67%(相对提升10%),Llama-3.2-3B更是从0%提升到3.33%——虽然绝对数字不高,但实现了"从无到有"的突破。
3. 小模型受益更大
Qwen2.5-Math-1.5B的平均分从40.85提升到42.58(+4.2%),而7B模型只从54.26提升到55.20(+1.7%)。这说明细粒度监督对小模型尤其有帮助——大模型本身能力强,"吃大锅饭"的负面影响相对较小。
关键发现:拓宽推理边界
论文强调了一个重要观察:PRL不仅提升平均性能(Average@n),更显著提升Pass@n指标。
| 指标 | 含义 | 反映的能力 |
|---|---|---|
| Average@n | 采样n次的平均准确率 | 稳定性、可靠性 |
| Pass@n | 采样n次至少成功一次的概率 | 能力上限、潜力 |
Pass@n的提升意味着什么?
想象一个场景:你让模型做100道题,每道题采样8次。
- Average@8高意味着:大部分题都能稳定做对
- Pass@8高意味着:即使有些题不稳定,但多试几次总能做对
PRL的Pass@n提升说明它让模型能够解决一些之前完全解决不了的难题——这就是"拓宽推理边界"的含义。
论文中有一个很有说服力的例子:Llama-3.2-3B在AIME24上,GRPO训练后Pass@8=0%,PRL训练后Pass@8=3.33%。这意味着有几道题是只有PRL训练的模型才能解出来的。
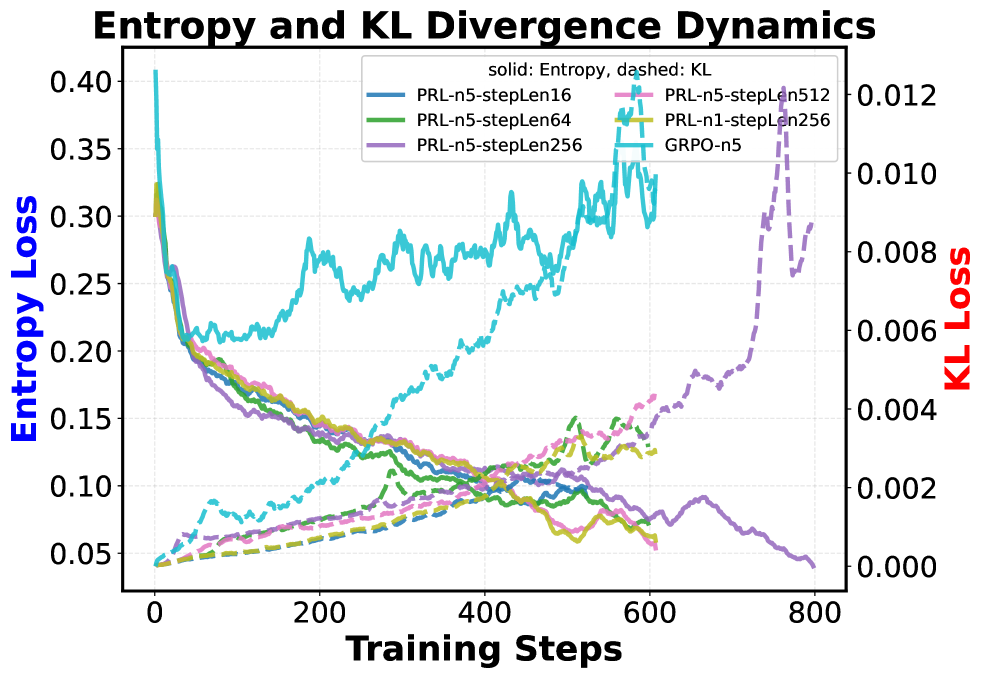
图2:训练过程中熵(实线)和KL散度(虚线)的变化。可以看到PRL在不同步长设置下的训练动态。较长的步长(如512)倾向于保持更高的熵,这意味着模型保持了更多的探索能力,不会过早收敛到局部最优。
消融实验:每个组件的贡献
实验1:步骤长度的影响
| 步骤长度(token) | MATH500 | Minerva | 平均 |
|---|---|---|---|
| 16 | 76.40 | 28.80 | 41.23 |
| 64 | 76.80 | 29.20 | 41.85 |
| 256 | 77.00 | 29.80 | 42.58 |
| 512 | 76.60 | 29.40 | 42.10 |
| 换行符 | 76.20 | 28.60 | 41.02 |
256 token的固定长度效果最佳。太短(16)信号太密集,噪声大;太长(512)信号太稀疏,学不到东西。
实验2:KL系数η的影响
| η值 | MATH500 | 训练稳定性 |
|---|---|---|
| 0.001 | 75.20 | 很稳定但学得慢 |
| 0.01 | 76.60 | 较稳定 |
| 0.1 | 77.00 | 平衡点 |
| 1.0 | 73.80 | 不稳定 |
η太小,KL惩罚太重,模型不敢探索;η太大,惩罚太轻,模型容易跑偏。
实验3:采样数量n的影响
| 采样数n | MATH500 | 计算成本 |
|---|---|---|
| 2 | 75.80 | 低 |
| 5 | 77.00 | 中等 |
| 8 | 77.20 | 高 |
n=5是一个不错的平衡点。增加到8只提升0.2%,但计算成本增加60%。
🔬 技术分析与深度讨论
为什么PRL有效?从多个角度分析
角度1:信用分配更准确
传统方法给所有步骤相同的奖励信号,但实际上不同步骤对最终结果的贡献差异很大。
PRL通过future_kl项,自然地实现了时间差异惩罚:
- 第1步的future_kl包含后面所有步骤的KL,值最大
- 最后一步的future_kl=0
这意味着早期步骤获得更大的奖励权重——因为早期决策影响后续所有步骤,应该更谨慎。这和强化学习中的**时间差分(TD)**思想一脉相承。
角度2:学习信号更平滑
稀疏奖励导致梯度信号要么是零,要么是很大的跳变,训练很不稳定。
用一个简单的对比来说明:
| 方法 | 梯度模式 | 训练稳定性 |
|---|---|---|
| 结果奖励 | [0, 0, 0, …, 0, 大跳变] | 差 |
| PRL | [小更新, 小更新, …, 小更新] | 好 |
过程奖励把一个大的跳变分解成多个小的更新,训练曲线更平滑。
角度3:更好的探索
从图2可以看到,PRL训练过程中保持了更高的熵值。
熵高意味着什么?意味着模型在学习过程中保持了更多的随机性,有助于探索不同的推理路径,而不是过早收敛到局部最优。
这和强化学习中的**探索-利用权衡(Exploration-Exploitation Trade-off)**直接相关。PRL的设计让模型在早期保持足够的探索能力,后期再逐渐收敛。
与其他过程奖励方法的深度对比
| 方法 | 原理 | 是否需要MCTS | 是否需要额外PRM | 理论保证 | 计算开销 |
|---|---|---|---|---|---|
| OpenAI o1风格 | MCTS + PRM | 是 | 是 | 弱 | 极高 |
| Google PAV | 全自动步骤标注 | 否 | 是(隐式) | 中等 | 中等 |
| 启发式分配 | 平均/衰减分配 | 否 | 否 | 无 | 低 |
| 隐式PRM | 用ORM间接生成过程奖励 | 否 | 否(但需要ORM) | 中等 | 中等 |
| PRL | 数学推导直接分解 | 否 | 否 | 强 | 低 |
PRL的独特优势在于:
- 不需要额外模型:不用训练PRM或Critic,用现有的策略模型和参考模型就够了
- 不需要多次采样:一次rollout就能给出所有步骤的奖励
- 有理论保证:不是经验设计,而是从熵正则化RL目标函数严格推导出来的
- 计算高效:相比GRPO只多了一些对数概率的计算,几乎没有额外开销
与GRPO的关系:改进而非替代
PRL不是要取代GRPO,而是在GRPO基础上的改进。可以这样理解:
| 组件 | GRPO | PRL |
|---|---|---|
| 采样策略 | 组内多次采样 | 相同 |
| 优势计算 | 组内相对归一化 | 组内归一化 + 过程分解 |
| KL惩罚 | 逐token惩罚 | 按步骤累积惩罚 |
| 策略更新 | PPO-clip | 相同 |
核心改变就是优势计算方式:从粗粒度的轨迹级优势,变成细粒度的步骤级过程优势。
潜在局限性的深入分析
局限1:模型规模有限
实验最大只做到7B参数,是否能扩展到70B、100B级别还不清楚。
我的推测:PRL在大模型上可能依然有效,但边际收益可能递减。原因有二:
- 大模型本身能力更强,"吃大锅饭"的负面影响相对较小
- 大模型的推理链通常更短(更高效),步骤分解的收益降低
局限2:步骤划分比较粗糙
固定token长度的划分方式可能不符合实际推理的语义结构。
理想的步骤划分应该是语义驱动的:每个"思考单元"是一步。但这需要额外的分割模型,又增加了复杂度。
一个可能的改进方向是:训练一个轻量级的步骤分割器,或者用规则+启发式方法来识别语义边界。
局限3:奖励函数受限
当前只用了正确/错误的二元奖励(0/1),更复杂的奖励函数(比如部分分)下表现如何还需探索。
数学题还好说,答案对就是对。但对于代码生成、逻辑推理等任务,"部分正确"是很常见的——比如代码通过了一半的测试用例。PRL能否处理这种连续奖励信号,是一个开放问题。
局限4:泛化性验证不足
主要在数学推理上验证,代码生成、逻辑推理、科学问答等其他领域效果如何?
论文的实验集中在数学领域有其道理——数学答案可以精确验证,奖励信号clean。但实际应用中,很多任务的奖励本身就是noisy的(比如用LLM打分),PRL在这种场景下是否依然有效,值得进一步研究。
💡 工程落地建议
如果想在实际项目中尝试PRL,这里有几点建议:
适用场景判断
| 场景 | 是否适合 | 原因 |
|---|---|---|
| 数学推理 | ✅ 非常适合 | 论文验证的主场景 |
| 代码生成 | ✅ 适合 | 执行结果可验证 |
| 逻辑推理 | ✅ 适合 | 有明确的对错 |
| 多步问答 | ⚠️ 需改造 | 步骤划分不明确 |
| 开放式对话 | ❌ 不适合 | 很难定义"正确"的推理步骤 |
| 创意写作 | ❌ 不适合 | 无法定义结果奖励 |
实现要点
1. 数据准备
你需要有明确可验证的奖励信号。对于数学题,就是答案对不对;对于代码,可以是单元测试通过率。
如果原始数据没有明确答案,可以考虑:
- 用GPT-4生成参考答案
- 用规则+人工校验
- 退回到用LLM打分(但效果可能打折扣)
2. 超参数选择
| 超参数 | 建议值 | 调节建议 |
|---|---|---|
| 步骤长度 | 256 token | 根据任务调整,推理越复杂可以越长 |
| KL系数η | 0.1 | 如果训练不稳定就调小,学得慢就调大 |
| 采样数n | 5 | 计算资源充足可以增加到8 |
| clip系数ε | 0.2 | 标准PPO设置,一般不用动 |
3. 监控指标
除了常规的loss和accuracy,建议监控:
# 关键监控指标
metrics = {
"entropy": ..., # 策略熵,应该逐渐下降但不要降到0
"kl_divergence": ..., # 和参考模型的KL,不要太大(>15是warning)
"future_kl_mean": ..., # 平均future_kl,看过程奖励是否合理
"grad_norm": ..., # 梯度范数,排查训练不稳定
}
4. 代码实现参考
核心改动在于优势计算:
def compute_process_advantages(
log_probs: torch.Tensor, # [batch, seq_len] 当前策略的对数概率
ref_log_probs: torch.Tensor, # [batch, seq_len] 参考策略的对数概率
rewards: torch.Tensor, # [batch] 最终奖励
step_boundaries: List[int], # 步骤边界位置
eta: float = 0.1
):
"""计算PRL的过程优势"""
batch_size, seq_len = log_probs.shape
# 计算逐token的log ratio
log_ratios = log_probs - ref_log_probs # [batch, seq_len]
# 按步骤累积future_kl
advantages = []
for b in range(batch_size):
traj_advantages = []
for i, (start, end) in enumerate(zip(step_boundaries[:-1], step_boundaries[1:])):
# future_kl = sum of log_ratios from current step to end
future_kl = log_ratios[b, end:].sum()
# process advantage = reward - future_kl / eta
adv = rewards[b] - future_kl / eta
traj_advantages.extend([adv] * (end - start))
advantages.append(traj_advantages)
return torch.tensor(advantages)
📊 总结与展望
论文贡献总结
PRL这篇论文的贡献可以概括为:
1. 理论贡献
证明了熵正则化RL目标可以自然分解为过程奖励,给出了严格的数学推导。这不是拍脑袋设计的启发式方法,而是有坚实理论基础的。
2. 方法贡献
提出了不依赖MCTS或额外PRM的过程奖励计算方法。只需要策略模型和参考模型的对数概率,就能计算出每一步的过程优势。
3. 实证贡献
在多个数学推理基准上验证了方法的有效性,特别是在高难度竞赛题上展现了"拓宽推理边界"的能力。
更大的视角
从更宏观的角度看,PRL这篇工作反映了当前LLM推理训练的一个重要趋势:从粗粒度到细粒度,从结果导向到过程导向。
这个趋势在多个方向上都有体现:
| 方向 | 粗粒度(早期) | 细粒度(当前) |
|---|---|---|
| 奖励信号 | 结果奖励(ORM) | 过程奖励(PRM/PRL) |
| 训练粒度 | 完整回答级 | 步骤级/token级 |
| 评估方式 | Exact Match | 多指标综合评估 |
| 模型结构 | 单一模型 | 推理+验证+批评 |
PRL为"不用额外模型也能获得细粒度监督"这条路提供了一个优雅的解法。虽然效果可能不如重金打造的PRM系统(比如传闻中OpenAI o1用的那套),但其理论优雅性和工程简洁性使它成为一个很有价值的baseline。
未来展望
短期可改进的方向:
- 自适应步骤划分:根据任务特点动态调整步骤长度
- 连续奖励支持:扩展到部分分场景
- 更大规模验证:在70B+模型上验证效果
长期研究问题:
- 与搜索方法的结合:PRL能否与MCTS等搜索方法配合使用?
- 跨任务迁移:在数学上训练的过程奖励能力,能否迁移到代码、逻辑等其他领域?
- 理论深化:过程奖励的最优划分粒度是否有理论界?
📚 延伸阅读
- DeepSeek-R1技术报告:了解GRPO的原始设计和大规模推理模型训练
- OpenAI o1系列解读:对比不同的过程奖励建模思路
- Google PAV论文:全自动步骤标注的过程奖励方法
- PRMBench:过程奖励模型的标准化评估基准
- 《Temporal Credit Assignment in Reinforcement Learning》:信用分配问题的经典论文
📝 参考信息
- 论文标题:PRL: Process Reward Learning Improves LLMs’ Reasoning Ability and Broadens the Reasoning Boundary
- 作者:Jiarui Yao, Ruida Wang, Tong Zhang
- 机构:伊利诺伊大学厄巴纳-香槟分校 (UIUC)
- 论文链接:https://arxiv.org/abs/2601.10201

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 10
10 0
0- 0



 已为社区贡献61条内容
已为社区贡献61条内容

所有评论(0)