800 万像素一上车,SoC 就开始喘了
这不是 AI 算力问题,是系统级算力分配问题。
🚗🔥800 万像素一上车,SoC 就开始喘了
——环视 / DMS / AMS 背后,真正吃算力的不是 AI,而是“看不见的地方”
一句话结论先给出来:
很多 800 万摄像头项目不是“AI 算力不够”,而是 CPU、带宽、内存、总线在背后一起拖后腿。
算力表看着很猛,系统一跑就掉帧,这不是巧合,是结构性问题。

一、为什么现在动不动就 800W?📸
你会发现一个趋势:
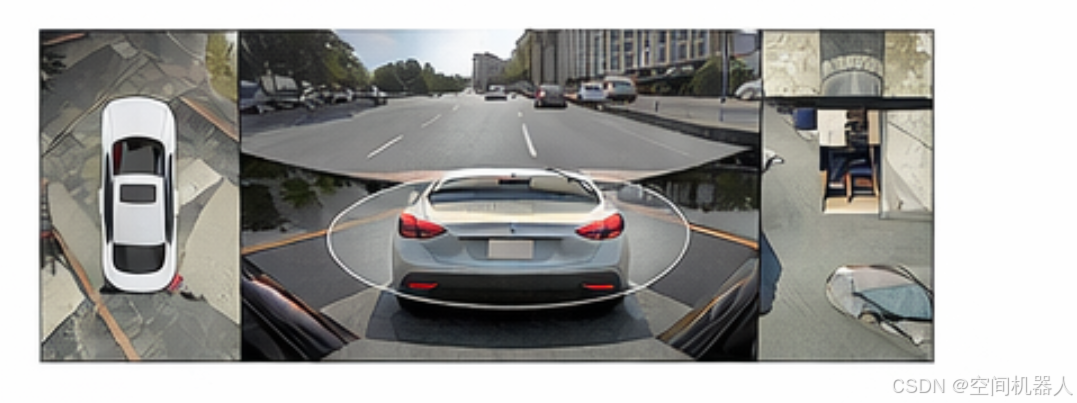
- 环视:从 1.3MP → 2MP → 3MP → 8MP
- DMS / OMS:从 VGA → 2MP → 8MP HDR
- AMS(舱内感知):开始要 暗光 + 高动态 + 大视角
原因很现实:
- 算法开始要“看细节”:安全带、手机、眼睛闭合、手部动作
- OEM 要“可扩展”:今天 DMS,明天加 OMS、情绪识别
- 一套硬件撑 5~8 年生命周期
🎯 但问题是:
摄像头升级了,SoC 架构和系统设计并没有同步升级。
二、800 万像素,带宽到底有多吓人?💥
很多方案 PPT 上只写一句:
“8MP,60fps,支持”
但工程师第一反应应该是:
你算过带宽没有?
我们直接算一个最真实、最常见的配置。
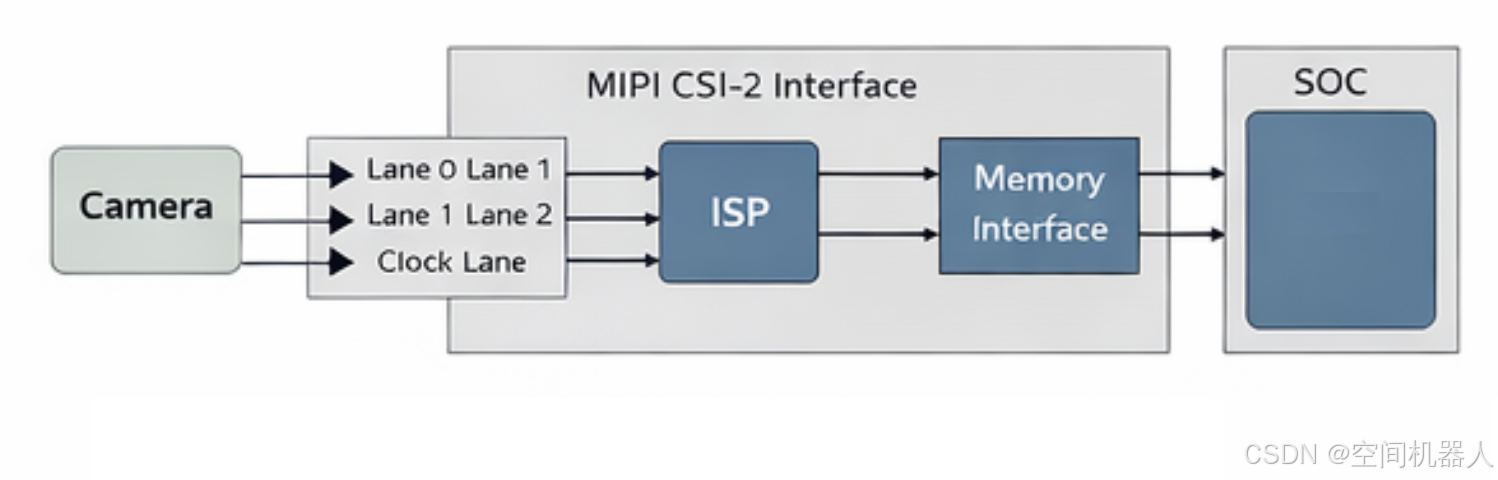
📐 基本假设(非常工程化)
- 分辨率:3840 × 2160(≈ 8.3MP)
- 帧率:30 fps(别急着 60)
- 数据格式:RAW10(车载最常见)
- 接口:MIPI CSI-2
📊 单路摄像头裸数据带宽
单帧数据量:
3840 × 2160 × 10 bit ≈ 83 Mb ≈ 10.4 MB
每秒数据量:
10.4 MB × 30 fps ≈ 312 MB/s
🚗 结论一:
一颗 8MP@30fps 摄像头,单路就 300MB/s 级别
🔥 那 4 路环视呢?
300 MB/s × 4 ≈ 1.2 GB/s
还没算:
- Blank
- CSI Packet overhead
- ISP 内部搬运
- DDR 写入 + 读出
🎯 真实系统里,1.5 GB/s 是保守值
三、问题来了:SoC 真的是“算力不够”吗?🧠
这是我这一年项目里最常见的误判。
❌ 错误直觉
“帧率不稳 → AI 不够 → 换更大 TOPS”
✅ 实际真相
帧率不稳,80% 死在 CPU + DDR + Bus 仲裁
四、CPU 在 800W 项目里,干的都是什么脏活累活?🧹
别被 “AI 芯片” 这四个字骗了。
📌 在真实系统中,CPU 主要负责:
- Camera 驱动 & Buffer 管理
- ISP task 调度
- DMA / Cache 协调
- 多摄同步(时间戳、帧对齐)
- GPU / NPU 前后处理
- Linux / QNX 任务调度
🎯 重点一句话:
AI 只跑模型,CPU 要“扛全家”
🔥 一个真实踩坑案例(环视)
- 4 × 8MP
- NPU 利用率:不到 40%
- GPU 利用率:30%
- CPU:A72 核心直接 90%+
现象:
- 帧率随机抖
- 偶发花屏
- 系统温度异常
📌 最终定位:
- Camera buffer 在 CPU 上 memcpy
- Cache miss 严重
- DDR 访问冲突
不是 AI 慢,是 CPU 被活活累死。
五、CPU 算力到底要怎么看?别再只盯 GHz ⚠️
很多人选 SoC 只看:
- A76?
- 主频 2.4GHz?
这是不够的。
✅ 工程视角要看 4 点:
- 大核数量(不是频率)
- L2 / L3 Cache 大小
- DMA / ISP 是否能绕过 CPU
- Camera Pipeline 是否支持零拷贝
🎯 经验总结:
800W 多摄项目,
4 个 A72 只是起步,不是富余
六、DMS / AMS:分辨率不高,CPU 更容易翻车 😵
很多人以为:
“DMS 不就 1 路摄像头吗?”
现实完全不是这样。
🚗 DMS 的隐性成本
- HDR 多曝光
- 红外 + 可见光切换
- ROI 裁剪
- 人脸 / 眼睛 / 头部多任务
- 高频率帧处理(60fps 很常见)
📌 你看到的是 1 路
📌 CPU 看到的是 5~6 路 Pipeline
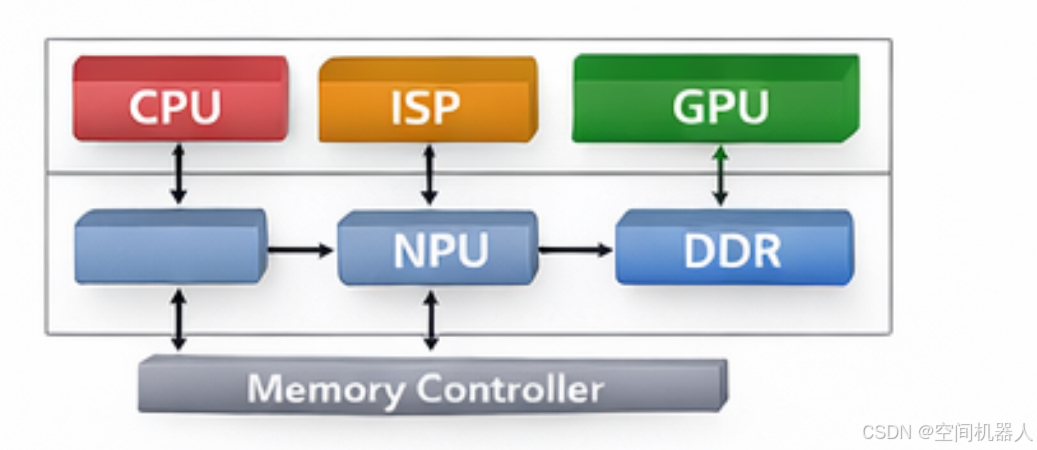
七、DDR 带宽:所有问题的“放大器”💣
这是最容易被忽略、但最致命的点。
📊 一个典型链路
Camera → ISP → DDR(写)
DDR → GPU / NPU(读)
处理后 → DDR(写)
Display / Encode → DDR(读)
🎯 一句话:
DDR 是所有模块的“十字路口”
🔥 真实项目经验
- LPDDR4X 理论 25.6 GB/s
- 实际可用:不到 60%
- 多摄 + GPU + Display 一起跑 → 瞬间堵死
八、工程级结论🧩
✅ 如果你要做 800W 环视 / DMS:
- 别迷信 TOPS
- 先算带宽,再看 CPU
- 再看系统架构是否支持零拷贝
🎯 一句话总结:
“这不是 AI 算力问题,是系统级算力分配问题。”
九、为什么很多 Demo 能跑,量产就翻车?🚧
因为 Demo 通常:
- 单路摄像
- 低帧率
- 关闭温控
- 没跑后台服务
而量产要面对:
- 多路并发
- 高温
- 长时间运行
- 所有服务全开
🔥 800W 项目拼的不是峰值,是“长期稳定”
尾🔥
摄像头越清晰,系统越残酷。
真正拉开方案差距的,从来不是参数表,而是你有没有在第一天就把 CPU 和带宽算清楚。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 40
40 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)