即插即用系列 | AAAI 2025,PConv & SD Loss 详解!融合风车卷积与动态损失的涨点新范式。
【AI即插即用CV涨点模块开源】 本文介绍了一个专为CV任务设计的即插即用模块开源仓库(GitHub链接),提供SOTA模型创新模块、论文精读及实现代码。重点解析了AAAI 2025论文《PConv-SDLoss》的创新: PConv风车形卷积:通过不对称填充和十字卷积核(1×3和3×1)模拟红外小目标的高斯分布特性,参数量减少22%的同时扩大177%感受野; SD Loss动态损失:根据目标尺寸
论文题目:Adaptive Point-to-Point Convolution for Remote Sensing Image Pansharpening
论文原文 (Paper):https://arxiv.org/pdf/2412.16986
官方代码 (Code):https://github.com/JN-Yang/PConv-SDloss-Data
本论文的完整复现代码(即插即用版)已更新至专栏
即插即用系列(代码实践) | AAAI 2025,PConv & SD Loss 详解!融合风车卷积与动态损失的涨点新范式。
论文精读:PConv-SDLoss
1. 核心思想
- 本文针对红外小目标检测(IRSTDS)任务,提出了两个核心创新:**PConv(风车形卷积)**和 SD Loss(尺度动态损失)。
- PConv 是一种新型的即插即用卷积模块,其设计灵感来源于红外小目标(IRST)在 3D 灰度图上呈现的高斯空间分布。它通过不对称填充(asymmetry padding)和十字交叉的卷积核( 1 × 3 1 \times 3 1×3 和 3 × 1 3 \times 1 3×1)来模拟这种“中心亮、四周暗”的“风车形”特征,从而以极小的参数代价换取了巨大的感受野和更强的特征提取能力。
- SD Loss 是一种新型损失函数,它动态地调整“尺度损失”(Sloss)和“位置损失”(Lloss)的权重。它能根据目标尺寸(Area)自适应地调整惩罚侧重:对小目标(IoU 易突变)降低尺度损失(Sloss)的权重,更关注位置(Lloss);对大目标则相反,从而解决了传统 IoU-based 损失对小目标尺度不敏感和标签波动大的问题。
2. 背景与动机
-
[文本角度总结]
基于 CNN 的红外小目标检测(IRSTDS)虽然取得了巨大进展,但仍面临两大瓶颈:- 卷积核的“设计缺陷”: 现有的 CNN 方法普遍使用标准卷积(如 3x3 方形卷积)。这种“一刀切”的设计忽视了红外小目标本身的物理特性。作者观察到(如图 1),IRST 在灰度 3D 视图中呈现出高斯分布(中心尖锐,向外扩散)。标准方形卷积核无法有效匹配这种中心集中的高斯形态,导致特征提取能力不佳。
- 损失函数的“尺度缺陷”: 现有的损失函数(无论是 BBox 用的 CIoU 还是 Mask 用的 SLS Loss)虽然结合了尺度(IoU/Scale)和位置(Location)损失,但它们对所有尺度的目标都**“一视同仁”。然而,由于标签的主观性和目标暗淡(如图 2),小目标的 IoU 极易发生剧烈波动(例如,1 个像素的偏差可能导致 IoU 从 0.5 降到 0)。现有损失函数没有考虑这种尺度敏感性**,导致模型在回归小目标时性能受限。
本文的动机:1) 设计一种新型卷积核(PConv),使其结构更贴合 IRST 的高斯空间特性。2) 设计一种新型损失函数(SD Loss),使其能够根据目标尺度动态调整对尺度和位置的关注度,以提高对小目标的检测鲁棒性。
-
动机图解分析(Figure 1, 2, 3):
-
图表 A (Figure 1):揭示“高斯分布”这一物理特性
- “看图说话”: 这张图展示了两个红外小目标的 2D 图像(上)和对应的 3D 灰度值(下)。
- 分析: 无论是背景相对干净(左图)还是背景杂乱(右图),小目标在 3D 视图中都呈现出中心尖锐、向四周快速衰减的形态,这正是高斯分布的典型特征。
- 结论(“语义鸿沟”): 这揭示了标准 3x3 方形卷积的“语义鸿沟”——用一个均匀的方形核去匹配一个尖锐的高斯峰,效率低下且不符合物理直觉。这直接催生了本文设计
PConv(风车形卷积)的动机。
-
图表 B (Figure 2):揭示“标签波动”这一数据缺陷
- “看图说话”: 这张图展示了人工标注 BBox 和 Mask 时存在的“主观性”和“波动性”。
- 分析: 即使是同一个目标,标注的 Mask(底部三个小图)和 BBox(顶部绿色和红色框)也存在明显差异(例如 5x4 vs 7x4)。
- 结论(“效率瓶颈”): 这种标签噪声导致了 IoU(尺度损失 Sloss)的剧烈波动(高达 86%)。如果损失函数不考虑这一点,盲目地惩罚 IoU,会导致训练不稳定。这催生了本文设计
SD Loss的动机,即必须降低 IoU 损失在小目标上的权重。
-
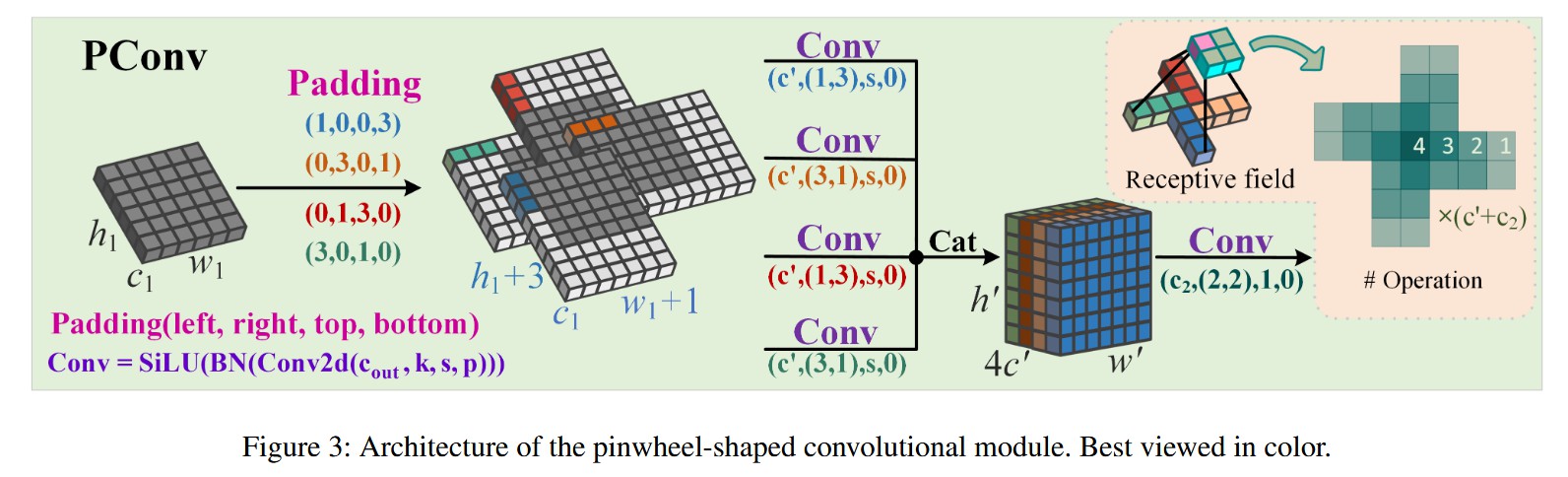
图表 C (Figure 3):PConv 的“风车形”设计
- “看图说话”: 这张图是
PConv的核心结构图。 - 分析:
PConv的关键在于四个并行的卷积分支。这四个分支通过不对称填充(Padding)(例如,分支 1 用Padding(1,0,0,3))和矩形卷积核(Conv(c', (1,3))或Conv(c', (3,1)))的组合,巧妙地实现了从四个方向(上、下、左、右)向中心汇聚的特征提取模式。 - 结论(“风车形”): 最终,这四个分支的输出被
Cat(拼接)起来,并通过一个 2 × 2 2 \times 2 2×2 卷积(注意: k = 2 , s = 1 k=2, s=1 k=2,s=1)进行融合。这种“十字交叉”再融合的结构,在感受野上(右上角图示)形成了中心权重最高(4次操作)、四周权重递减(3, 2, 1次)的效果。这完美地模拟了 Figure 1 所示的高斯分布,因此它比标准卷积更适合提取 IRST 特征。
- “看图说话”: 这张图是
-
3. 主要贡献点
- 提出 PConv (风车形卷积): 针对红外小目标(IRST)的高斯空间分布特性,设计了一种即插即用的
PConv模块。它通过并行的、不对称填充的矩形卷积( 1 × 3 1 \times 3 1×3 和 3 × 1 3 \times 1 3×1)来模拟“风车形”感受野,实现了中心高、四周低的类高斯加权效果。 - PConv 的高效性: 相比标准 3x3 卷积,
PConv(k=3) 在参数量减少 22.2% 的同时,将感受野扩大了 177%(从 9 提升到 25),实现了极高的效率。 - 提出 SD Loss (尺度动态损失):
- 针对 BBox 和 Mask 标签在小目标上 IoU 波动剧烈的问题,提出了
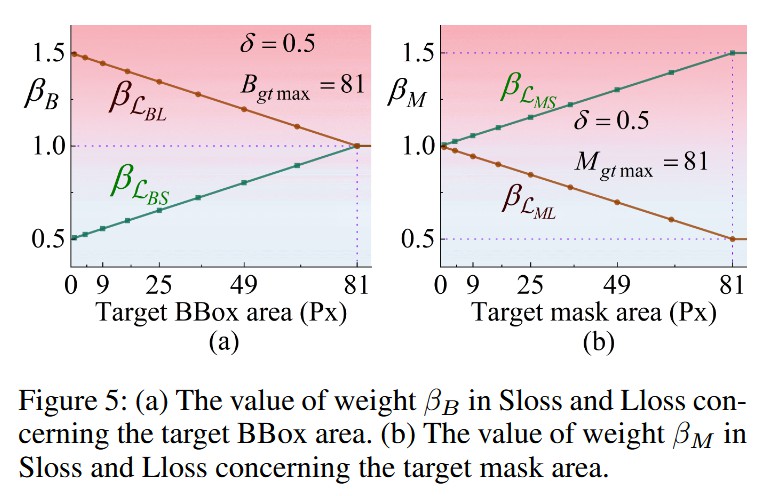
SD Loss。 - 核心机制(Figure 5): 该损失函数包含一个基于目标面积(Area)的动态系数 β \beta β。
- SDB Loss (用于 BBox): 对于 BBox,当目标越小时,降低尺度损失( L B S \mathcal{L}_{BS} LBS)的权重,提高位置损失( L B L \mathcal{L}_{BL} LBL)的权重。
- SDM Loss (用于 Mask): 对于 Mask,当目标越小时,提高尺度损失( L M S \mathcal{L}_{MS} LMS)的权重,降低位置损失( L M L \mathcal{L}_{ML} LML)的权重(因为 Mask 的位置损失不稳定)。
- 针对 BBox 和 Mask 标签在小目标上 IoU 波动剧烈的问题,提出了
- 构建 SIRST-UAVB 数据集: 针对现有数据集规模小、场景简单的问题,本文构建并发布了一个最大、最具挑战性的真实场景红外小目标数据集 SIRST-UAVB,包含了复杂的背景和暗弱的无人机/鸟类目标。
4. 方法细节
-
整体网络架构:
- 本文没有提出新的整体网络架构。
PConv和SD Loss是作为**“即插即用”的组件**,被应用(Plug-and-play)到现有的 SOTA 网络(如 YOLOv8n-p2, MSHNet, DNANet, ISNet)中,以提升它们的性能。- PConv 的部署:
PConv被用来替换骨干网络(Backbone)**浅层(lower layers)**的标准卷积(Conv)层(例如,替换 YOLOv8n-p2 的前两层卷积)。 - SD Loss 的部署:
SD Loss(SDB 或 SDM) 被用来替换网络原始的损失函数(如 CIoU 或 SLS Loss)。
-
核心创新模块详解(Figure 3 & 5):
- 对于 模块 A:PConv (风车形卷积)
- 理念: 模拟 IRST 的高斯空间分布(中心权重高,四周低),并高效扩大感受野。
- 内部结构:
- 输入: 特征图 X X X( h 1 × w 1 × c 1 h_1 \times w_1 \times c_1 h1×w1×c1)。
- 并行分支(核心): X X X 被并行送入四个分支。每个分支都使用不同的不对称填充(Padding)和矩形卷积核:
- 分支 1 (上):
Padding(1,0,0,3)(上3,左1) +Conv(c', (1,3))( 1 × 3 1 \times 3 1×3 核) - 分支 2 (右):
Padding(0,3,0,1)(右3,下1) +Conv(c', (3,1))( 3 × 1 3 \times 1 3×1 核) - 分支 3 (下):
Padding(0,1,3,0)(下3,右1) +Conv(c', (1,3))( 1 × 3 1 \times 3 1×3 核) - 分支 4 (左):
Padding(3,0,1,0)(左3,上1) +Conv(c', (3,1))( 3 × 1 3 \times 1 3×1 核)
- 分支 1 (上):
- 拼接 (Cat): 四个分支的输出特征图( X 1 X_1 X1 到 X 4 X_4 X4)在通道维度上进行拼接(
Cat),得到一个 h ′ × w ′ × 4 c ′ h' \times w' \times 4c' h′×w′×4c′ 的特征图。 - 融合 (Fusion): 使用一个**
Conv(c_2, (2,2), 1, 0)**(即 2 × 2 2 \times 2 2×2 卷积,步幅 1,无填充)对拼接后的特征图进行卷积。 - 输出: 得到最终输出 Y Y Y( h 2 × w 2 × c 2 h_2 \times w_2 \times c_2 h2×w2×c2)。
- 设计目的:
- 风车形: 四个分支的不对称填充和矩形卷积核,在空间上构成了“风车叶片”向外扩散的结构。
- 类高斯加权: 如图 3 右上角的“Receptive field”所示,当 2 × 2 2 \times 2 2×2 的融合核滑过时,中心的像素点(4)被所有四个分支的 2 × 2 2 \times 2 2×2 区域覆盖,因此被计算了 4 次;而外围的像素点(3, 2, 1)被覆盖的次数递减。这巧妙地实现了中心加权的类高斯效应。
- 高效率: 这种设计( k = 3 k=3 k=3)的感受野达到了 25 ( 5 × 5 5 \times 5 5×5 ),但参数量( 7 c 1 2 7c_1^2 7c12)却比标准 3 × 3 3 \times 3 3×3 卷积( 9 c 1 2 9c_1^2 9c12)更少。
- 对于 模块 B:SD Loss (尺度动态损失)
- 理念: 解决小目标 IoU 波动大(标签噪声)和尺度/位置敏感度不一致的问题。
- 机制 (SDB Loss for BBox):
- 计算 β B \beta_B βB (公式 12): 首先根据目标 B g t B_{gt} Bgt 的面积(Area)计算一个基础权重 β B \beta_B βB。该权重与面积成正比,但上限为 δ \delta δ(例如 δ = 0.5 \delta=0.5 δ=0.5)。
- 计算 Sloss/Lloss 权重 (公式 14):
- β L B S = 1 − δ + β B \beta_{\mathcal{L}_{BS}} = 1 - \delta + \beta_B βLBS=1−δ+βB (尺度损失权重)
- β L B L = 1 + δ − β B \beta_{\mathcal{L}_{BL}} = 1 + \delta - \beta_B βLBL=1+δ−βB (位置损失权重)
- 分析 (Figure 5a): 当目标面积 B g t → 0 B_{gt} \rightarrow 0 Bgt→0 时, β B → 0 \beta_B \rightarrow 0 βB→0。此时, β L B S → 1 − δ \beta_{\mathcal{L}_{BS}} \rightarrow 1-\delta βLBS→1−δ (权重变小),而 β L B L → 1 + δ \beta_{\mathcal{L}_{BL}} \rightarrow 1+\delta βLBL→1+δ (权重变大)。
- 结论: SDB Loss 自动地对小目标的尺度损失(Sloss)降权,同时对位置损失(Lloss)增权,以应对 IoU 波动大的问题。
- 机制 (SDM Loss for Mask):
- 计算 β M \beta_M βM (公式 13): 逻辑同上。
- 计算 Sloss/Lloss 权重 (公式 16):
- β L M S = 1 + β M \beta_{\mathcal{L}_{MS}} = 1 + \beta_M βLMS=1+βM (尺度损失权重)
- β L M L = 1 − β M \beta_{\mathcal{L}_{ML}} = 1 - \beta_M βLML=1−βM (位置损失权重)
- 分析 (Figure 5b): 当目标面积 M g t → 0 M_{gt} \rightarrow 0 Mgt→0 时, β M → 0 \beta_M \rightarrow 0 βM→0。此时, β L M S → 1 \beta_{\mathcal{L}_{MS}} \rightarrow 1 βLMS→1 (权重变大),而 β L M L → 1 \beta_{\mathcal{L}_{ML}} \rightarrow 1 βLML→1 (权重变小)。
- 结论: SDM Loss 的策略与 SDB 相反。因为作者认为 Mask 标签的位置损失 L M L \mathcal{L}_{ML} LML 本身不稳定(它计算的是所有像素的平均位置),所以对小目标的位置损失(Lloss)降权,同时对尺度损失(Sloss)增权。
- 对于 模块 A:PConv (风车形卷积)
-
图解总结:
- Figure 1 揭示了问题 1:IRST 具有高斯分布,标准方形卷积不匹配。
- Figure 2 揭示了问题 2:IRST 标签(尤其是小目标)存在剧烈的 IoU 波动,标准 Loss 不适用。
- Figure 3 提供了解决方案 1:
PConv模块。它通过“风车形”的不对称矩形卷积和中心融合设计,完美地模拟了高斯感受野(中心权重高、四周低),且比标准卷积更高效。 - Figure 5 提供了解决方案 2:
SD Loss。它设计了一个动态权重 β \beta β,使损失函数能自适应于目标尺度,解决了小目标 IoU 波动大的问题。 - Figure 4, 6, 7 提供了结果验证:将
PConv和SD Loss这两个即插即用模块应用到 SOTA 网络(如 YOLOv8, MSHNet)上,能显著减少漏检(紫色圈)和误报(黄色圈),提升检测和分割性能。
5. 即插即用模块的作用
-
本文的两个核心创新
PConv和SD Loss都是**即插即用(Plug-and-play)**的组件。 -
PConv (风车形卷积):
- 作用: 这是一个卷积层模块,可作为
nn.Conv2d(标准卷积)的直接替代品,尤其适用于替换骨干网络的浅层(底层)。 - 适用场景:
- 红外小目标检测 (IRSTDS): 这是本文的原始应用。
PConv的类高斯感受野设计使其极度擅长从复杂背景中提取 IRST 的“中心高亮”特征(如图 4 所示,PConv能增强目标并抑制背景)。 - 任何“类高斯”特征的提取: 适用于其他任何具有“中心尖锐、四周模糊”特征的任务,例如天文图像中的恒星检测、医学影像中的微钙化点检测,或任何需要大感受野和高效率的通用骨干网络。
- 红外小目标检测 (IRSTDS): 这是本文的原始应用。
- 优势: 在参数量更少(-22.2%)的情况下,提供远超标准 3x3 卷积的感受野(+177%)。
- 作用: 这是一个卷积层模块,可作为
-
SD Loss (尺度动态损失):
- 作用: 这是一个损失函数,可作为标准 BBox 损失(如
CIoU,GIoU)或 Mask 损失(如Dice,SLS Loss)的直接替代品。 - 适用场景:
- 小目标检测/分割: 这是其核心适用场景。当数据集中包含大量小目标时,
SD Loss通过其尺度动态机制,可以显著提高模型对小目标的回归稳定性和检测精度。 - 标签噪声(IoU 波动大)的任务: 适用于任何标签(尤其是 BBox)存在较大主观性或波动性的数据集。
SDB Loss通过降低对小目标 Sloss 的依赖,使模型对这种标签噪声更加鲁棒。
- 小目标检测/分割: 这是其核心适用场景。当数据集中包含大量小目标时,
- 优势: 无需修改网络架构,仅替换损失函数即可根据目标尺度动态调整训练策略,提升模型对不同尺度目标的检测/分割平衡性。
- 作用: 这是一个损失函数,可作为标准 BBox 损失(如

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 24
24 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)