【MAPF】CBS 算法:多智能体路径规划的经典最优解框架
本文详细介绍了多智能体路径规划(MAPF)中的经典算法CBS(Conflict-Based Search)。CBS采用两层搜索结构:高层在约束树上检测冲突并添加约束(禁止某智能体在特定时间占据特定位置/边),低层则对受影响智能体重新运行A*算法规划路径。文章通过伪代码和Python实例演示了CBS的实现,并重点澄清了"为何不能简单用等待动作解决冲突"的常见误区——等待可能导致连
📢本篇文章是博主多智能体路径规划(MAPF)领域学习时,用于个人学习、研究或者欣赏使用,并基于博主对相关等领域的一些理解而记录的学习摘录和笔记,若有不当和侵权之处,指出后将会立即改正,还望谅解。文章分类在👉强化学习专栏:
【MAPF】多智能体路径规划---(1)《CBS 算法:多智能体路径规划的经典最优解框架》
CBS 算法:多智能体路径规划(MAPF)的经典最优解框架
目录
2.1 高层:在“约束树 CT(Constraint Tree)”上搜索
基于冲突搜索算法,CBS(Conflict-Based Search)是解决 多智能体路径规划(Multi-Agent Path Finding, MAPF) 的经典算法之一。它的核心魅力在于:
-
最优(可证明得到全局最小总代价解)
-
两层搜索(高层在“约束树”上搜索,低层对单智能体做 A*)
-
冲突驱动(只有出现冲突才增加约束)
在仓储机器人、AGV 调度、游戏 AI、群体机器人协作等场景中都很常见。
1. MAPF 的形式化定义
把环境表示为图 (网格也属于一种图)。有
个智能体
。
-
智能体
起点:
-
终点:
-
时间离散:
-
每步动作:移动到相邻点或等待
定义智能体的路径为一个顶点序列(随时间变化):
且满足可行转移:
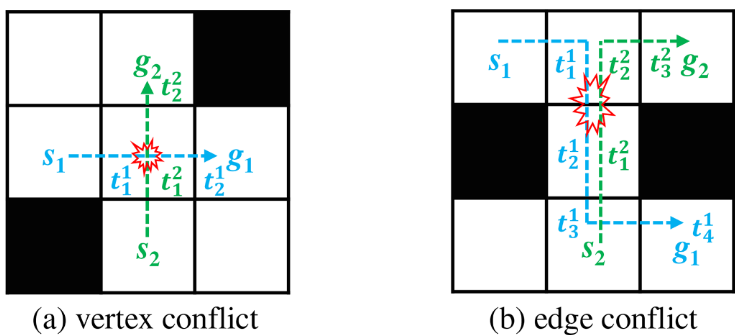
冲突(Conflict)
CBS 常用两类冲突:
(1) 顶点冲突 Vertex Conflict
表示为:
(2) 边冲突 Edge Conflict(交换位置)
表示为:
目标函数(最常见:总代价之和 SOC)
单个智能体成本(通常是步数):
总代价:
MAPF 的目标:找到一组无冲突路径 使 (SOC) 最小。
2. CBS 的核心:两层搜索
CBS 把问题拆成两层:
2.1 高层:在“约束树 CT(Constraint Tree)”上搜索
高层节点(CT 节点)包含:
-
约束集合 (C)
-
当前解(每个智能体一条路径)
-
代价
高层用 best-first(优先队列)按 (SOC) 从小到大扩展。
2.2 低层:单智能体最短路(通常 A*)
给定某个 CT 节点的约束集合 (C),对每个智能体分别求:
3. CBS 的完整流程
-
根节点:
,对每个智能体跑一次 A* 得到最短路集合
-
检查
中是否存在冲突:
-
无冲突:返回
-
有冲突:取一个冲突
分裂成两个子节点
-
冲突分裂(核心):
-
如果是顶点冲突
-
子节点 1:加约束
-
子节点 2:加约束
-
-
如果是边冲突
-
子节点 1:加约束
-
子节点 2:加约束
-
对每个子节点,只需要对新增约束影响到的那个智能体重新跑 A*,其他智能体路径沿用。
4. CBS 的伪代码
CBS(G, starts, goals):
root.constraints = ∅
root.paths[i] = A*(G, starts[i], goals[i], root.constraints, agent=i) for all i
root.cost = sum(cost(root.paths[i]))
OPEN = {root} (priority by cost)
while OPEN not empty:
P = pop lowest-cost node from OPEN
conflict = first_conflict(P.paths)
if conflict is None:
return P.paths
(i, j, type, details, t) = conflict
for agent k in {i, j}:
child = copy(P)
child.constraints += constraint_for(agent=k, conflict)
child.paths[k] = A*(..., constraints=child.constraints, agent=k)
if child.paths[k] exists:
child.cost = sum(cost(child.paths))
push child into OPEN
return failure
[Python] 一个可运行的CBS实例
项目我可参考的代码已经放入GitCode里面,可以通过下面链接跳转:🔥
后续相关MAPF算法也会不断在【MAPF】项目里更新,如果该项目对你有所帮助,请帮我点一个星星✨✨✨✨✨,鼓励分享,十分感谢!!!
若是下面代码复现困难或者有问题,也欢迎评论区留言。
CBS算法代码
"""基于冲突的搜索(Conflict-Based Search)算法"""
from a_star import A_Star
from entity import *
from ct_node import CTNode
from copy import deepcopy
import heapq
import sys
"""CBS类"""
class CBS:
def __init__(self, agents, size, obstacles):
self.agents = agents # 智能体列表
self.size = size # 地图大小
self.obstacles = obstacles # 障碍物
self.a_star = A_Star(size, obstacles) # 初始化底层规划器(A*算法)
self.open_list = [] # 待扩展(检查)节点列表
self.closed_list = [] # 已扩展(检查)节点列表
# 检查问题合理性(是否有起点重复、终点重复、起点终点与障碍物冲突)
def check_problem(self):
start_positions = [] # 起点列表
goal_positions = [] # 终点列表
for agent in self.agents:
# 检查起点重复
if agent.start in start_positions:
print("!!起点重复!!")
return False
start_positions.append(agent.start)
# 检查终点重复
if agent.goal in goal_positions:
print("!!终点重复!!")
return False
goal_positions.append(agent.goal)
# 检查起点终点与障碍物冲突
if agent.start in self.obstacles or agent.goal in self.obstacles:
print("!!起点终点与障碍物冲突!!")
return False
if(agent.start[0] < 0 or agent.start[0] >= self.size[0] or agent.start[1] < 0 or agent.start[1] >= self.size[1]):
print("!!起点超出地图范围!!")
return False
if(agent.goal[0] < 0 or agent.goal[0] >= self.size[0] or agent.goal[1] < 0 or agent.goal[1] >= self.size[1]):
print("!!终点超出地图范围!!")
return False
return True
"""冲突检测(第一个冲突)"""
def search_first_conflict(self,solution):
if solution is None:
return 404 # 无解的解决方案
paths = solution.paths
# 检查顶点冲突
for i in range(len(paths)):
for j in range(i+1, len(paths)):
max_t = max(len(paths[i].locations),len(paths[j].locations))
for t in range(max_t):
# 注:到达终点后仍可能被碰撞
if t>=len(paths[j].locations):
if paths[i].locations[t] == paths[j].locations[len(paths[j].locations)-1]:
return VertexConflict(self.agents[i], self.agents[j], paths[i].locations[t], t)
elif t>=len(paths[i].locations):
if paths[j].locations[t] == paths[i].locations[len(paths[i].locations)-1]:
return VertexConflict(self.agents[i], self.agents[j], paths[j].locations[t], t)
else: # 智能体i和j在t时刻到达同一位置
if paths[i].locations[t] == paths[j].locations[t]:
return VertexConflict(self.agents[i], self.agents[j], paths[i].locations[t], t)
# 检查边冲突
for i in range(len(paths)):
for j in range(i+1, len(paths)):
# 智能体i和j在t时刻交换位置
for t in range(len(paths[i].locations)-1):
if t>=len(paths[j].locations)-1:
break
if(paths[i].locations[t] == paths[j].locations[t+1] and paths[i].locations[t+1] == paths[j].locations[t]):
return EdgeConflict(self.agents[i], self.agents[j], paths[i].locations[t], paths[j].locations[t], t+1)
return None
"""冲突解决"""
def resolve_conflict(self, best_node, conflict):
# 顶点冲突
if(isinstance(conflict, VertexConflict)):
# 生成约束
constraint1 = VertexConstraint(conflict.agent1.id, conflict.location, conflict.time)
constraint2 = VertexConstraint(conflict.agent2.id, conflict.location, conflict.time)
# 生成CT子节点,并求解决方案(含计算总成本)
best_node.set_left_child([constraint1])
best_node.set_right_child([constraint2])
best_node.left_child.set_solution(self.get_solution(best_node.left_child))
best_node.right_child.set_solution(self.get_solution(best_node.right_child))
# 添加子节点进open_list
heapq.heappush(self.open_list, best_node.left_child)
heapq.heappush(self.open_list, best_node.right_child)
# 边冲突
elif(isinstance(conflict, EdgeConflict)):
# 生成约束
constraint1 = EdgeConstraint(conflict.agent1.id, conflict.begin, conflict.end, conflict.time)
#### 注意:agent2的begin和end是相反的
constraint2 = EdgeConstraint(conflict.agent2.id, conflict.end, conflict.begin, conflict.time)
# 生成CT子节点,并求解决方案(含计算总成本)
best_node.set_left_child([constraint1])
best_node.set_right_child([constraint2])
best_node.left_child.set_solution(self.get_solution(best_node.left_child))
best_node.right_child.set_solution(self.get_solution(best_node.right_child))
# 添加子节点进open_list
heapq.heappush(self.open_list, best_node.left_child)
heapq.heappush(self.open_list, best_node.right_child)
return None
"""获取解决方案"""
def get_solution(self, ctNode):
all_constraints = ctNode.get_all_constraints() # 获取完整约束(从根节点到当前节点)
solution = Solution() # 初始化解决方案
# 根节点: 初始化所有解决方案
if(ctNode.parent is None):
for agent in self.agents:
# 获取待求解智能体的全部约束
agent_constraints = ctNode.get_agent_constraints(agent, all_constraints)
# 调用底层规划求解
path = self.a_star.search(agent, agent_constraints)
if path is None: # 无解
print(str(agent.id)+"在当前节点约束下无解决方案")
return None
solution.add_path(path)
# 非根节点: 更新新增约束的智能体的解决方案,继承父节点其他解决方案
else:
solution = deepcopy(ctNode.parent.solution)
for constraint in ctNode.constraints:
# 获取待求解智能体的信息
current_agent_id = constraint.agent_id
current_agent = None
current_agent_index = -1
for i in range(len(self.agents)):
if(self.agents[i].id == current_agent_id):
current_agent = self.agents[i]
current_agent_index = i
# 智能体不存在
if(current_agent is None):
print("agent"+str(current_agent_id)+"不存在")
return None
# 求解
else:
# 获取待求解智能体的全部约束
current_agent_constraints = ctNode.get_agent_constraints(current_agent, all_constraints)
# 调用底层规划求解
path = self.a_star.search(current_agent, current_agent_constraints)
if path is None: # 无解
print(str(current_agent_id)+"在当前节点约束下无解决方案")
return None
else:
solution.paths[current_agent_index] = path # 更新该智能体的路径解决方案
return solution
"""CBS主函数"""
def cbs_main(agents, size, obstacles):
cbs = CBS(agents, size, obstacles) # 初始化环境
if(not cbs.check_problem()): # 检查问题合理性
return None
root = CTNode([], None) # 根节点
heapq.heappush(cbs.open_list, root) # 添加根节点
root.set_solution(cbs.get_solution(root))
# 主循环
count = 0 # 计数
while(cbs.open_list):
count+=1
if(count>999999999):
print("扩展节点数超过999999999,退出")
return None
sys.stdout.write(f"\r————————————进度: 第{count}个节点————————————")
sys.stdout.flush()
best_node = heapq.heappop(cbs.open_list) # 最小成本节点(最佳优先搜索)
cbs.closed_list.append(best_node) # 添加到已扩展节点列表
# 冲突检测
conflict = cbs.search_first_conflict(best_node.solution)
# 无解节点
if conflict == 404: # 无解节点
# cbs.open_list.remove(best_node) # 从待扩展节点列表中移除
# cbs.closed_list.append(best_node) # 添加到已扩展节点列表
continue
# 有冲突,解决冲突
elif(conflict):
cbs.resolve_conflict(best_node, conflict) # 冲突解决
# 无冲突,结束
else:
print()
print("成功找到解决方案,共扩展了 "+str(count)+" 个节点")
return best_node
return None
[Results] 运行结果
# 环境配置
Python 3.11.5
torch 2.1.0
torchvision 0.16.0
gym 0.26.2[Notice] 为什么冲突不直接用“等待”动作替代?
初学CBS算法的时候会有一个困惑:为什么不把所有智能体的路径用在时间树上展开,然后判断那个时间步里智能体出现了冲突。如果这样的话,只需要在冲突的时候,让冲突的智能体中的某一个暂停一个时间步即可避免冲突,实际上并不需要重规划,只需要给智能体添加一个暂停等待动作即可,这样的话算法不会复杂很多
这是在很多人第一次学 CBS 时最容易误解、但又最关键的点上
CBS 的高层约束 ≠ 简单地“让某个智能体等一步”
如果只是在冲突时强制等待一步:
-
❌ 不能保证最优
-
❌ 不能保证可行
-
❌ 很多情况下根本解决不了冲突
CBS 必须通过“约束 + 重新规划”,而不仅是插一个 wait 动作。这个想发想法非常自然,但它只在极少数简单冲突中成立
我们的理解是:
把每个智能体的路径按时间步展开
在时间 t 发现冲突
让其中一个智能体在 t 等一步
冲突就没了
👉 那为什么还要重规划?
这在单一、局部、孤立冲突中确实可能有效,但 CBS 要解决的是全局最优 MAPF,下面几个关键点会让这个策略崩溃。
核心误区 1:等待 ≠ 合法的“约束”
CBS 的约束是禁止某件事发生
而不是强制做某个动作
形式上:
-
约束是:

-
而“等一步”是:
这两者本质不同:
| CBS 约束 | 强制等待 | |
|---|---|---|
| 本质 | 剪掉一部分搜索空间 | 强行固定路径 |
| 是否最优 | ✅ 保证 | ❌ 可能更差 |
| 是否完备 | ✅ | ❌ |
| 是否局部最优 | ❌(允许绕路) | ✅(只做局部修改) |
CBS 从不指定“你必须怎么走”,它只说:
“你不能在 这个时间 占据 这个位置 / 这条边”
剩下的由 A* 自己决定。
核心误区 2:等待一步可能引发连锁冲突
来看一个反例(这是关键)。
🔴 反例 1:狭窄走廊(经典死锁)
A → → → ← ← ← B
-
一条 1 格宽走廊
-
A、B 从两端对向而行
-
最短路:直走
你提出的方法:
-
第一次冲突:让 A 等 1 步
-
下一步:还是冲突
-
再让 B 等?
-
无限来回等待 → 死锁
CBS 的做法:
-
给 A 或 B 加“边约束”
-
重新规划
-
发现:其中一个必须整体绕远路
-
等待 ≠ 解决方案
核心误区 3:等待一步可能导致代价不是最优
🔴反例 2:等待比绕路更贵
#######
# A . #
# . . #
# . B #
#######
-
A、B 有一条公共短路径
-
冲突点在中间
等待策略:
-
A 等 1 步 → B 先过
-
总成本:+1
CBS 重规划:
-
A 绕一小圈(不等)
-
总成本:+0 或 +1 更小
局部等待 ≠ 全局最优
CBS 的目标函数是:
不是:
“尽快解决当前这个冲突”
核心误区 4:有些冲突根本无法用等待解决
🔴 反例 3:边冲突(交换位置)
A ↔ B
-
时间 t:A 在 u,B 在 v
-
时间 t+1:A 在 v,B 在 u
让 A 等?
-
A 等 → B 仍然要从 v → u
-
还是冲突(顶点冲突)
唯一解法:
-
改变路径结构
-
等待不够
那 CBS 的“高层约束”到底是怎么加的?
1️⃣ 高层不是“时间展开的路径树”
❌ 约束树 ≠ 把所有时间步都展开
✅ 正确理解:
约束树(CT)是一棵“假设树”
每个节点表示:
“假设某些行为不允许发生”
在这些假设下,最优路径是什么
2️⃣ 冲突 → 二分世界(这是 CBS 的灵魂)
假设在节点 (N) 中发现冲突:
CBS 不是说“让谁等”,而是说:
世界 1:假设 i 不能在 (t) 到达 (v)
世界 2:假设 j 不能在 (t) 到达 (v)
也就是:
N
/ \
N_i N_j
-
左子树:约束 ⟨i, v, t⟩
-
右子树:约束 ⟨j, v, t⟩
这两个世界里:
-
智能体可以等
-
也可以绕路
-
也可以提前或延后到达
-
只要不违反约束
3️⃣ 为什么必须“重规划”?
因为约束是:
“禁止某状态”
而不是:
“强制某动作”
所以你必须重新求解:

如果你只是插一个 wait:
-
你是在 人为固定一条次优路径
-
而不是在新的可行空间里找最优解
我们的想法它其实对应的是另一类算法:
✔ 优先级规划(Prioritized Planning)
-
给智能体固定顺序
-
后面的对前面的等待
-
快,但 不最优、不完备
✔ WHCA*
-
局部时间窗
-
冲突时插等待
-
实时性好,但非最优
CBS 和它们的本质区别就在这里:
CBS 不“临时修补路径”,而是“系统性排除冲突模式”
CBS 的高层不是在修路径,而是在修“世界假设”
等待只是低层搜索中可能出现的一种结果,
但 永远不能被高层强制指定。
5. 复杂度与优缺点
-
最优性:若低层 A* 最优 + 高层按总代价 best-first,则 CBS 对 SOC 是最优的
-
完备性:有限图 + 有等待动作 + 有界规划时域下可保证
-
最坏复杂度:指数级(冲突多会导致 CT 节点爆炸)
-
优势:对中等规模、多数情况下冲突不那么密集的问题非常强
-
劣势:高密度拥挤场景会很慢;低层 A* 频繁重规划也会贵
6.总结
CBS(Conflict-Based Search,冲突基搜索)是一种用于多智能体路径规划(MAPF)的经典最优算法,它采用“两层搜索”结构:高层在约束树上进行搜索,先让每个智能体独立规划最短路径并检测冲突,一旦发现顶点冲突或边冲突,就将当前节点分裂为两个子节点,分别对冲突双方中的一个添加“在某时刻禁止占据某位置/某条边”的约束;低层则只对新增约束影响到的那个智能体重新运行 A* 求最短路径并复用其他路径,循环直到所有路径无冲突,从而在保证完备性的同时得到总代价最小的全局最优解。
参考文献:Conflict-based search for optimal multi-agent path finding
参考代码:GitHub - YeBai2503/MAPF-CBS: 多智能体路径规划——基于冲突算法CBS的实现
更多【MAPF】文章,请前往:【MAPF】多智能体路径规划专栏
博客都是给自己看的笔记,如有误导深表抱歉。文章若有不当和不正确之处,还望理解与指出。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请联系博主删除。如有错误、疑问和侵权,欢迎评论留言联系作者,或者添加VX:Rainbook_2,联系作者。✨

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 52
52 0
0- 0



 已为社区贡献25条内容
已为社区贡献25条内容

所有评论(0)