技术深度解析:ESMAP × AI 大模型如何构建可预测的仿真生态
从理论到实践:解密 ESMAP 可视化引擎与 AI 大模型的深度融合技术架构
技术架构:三层融合架构实现虚实共生
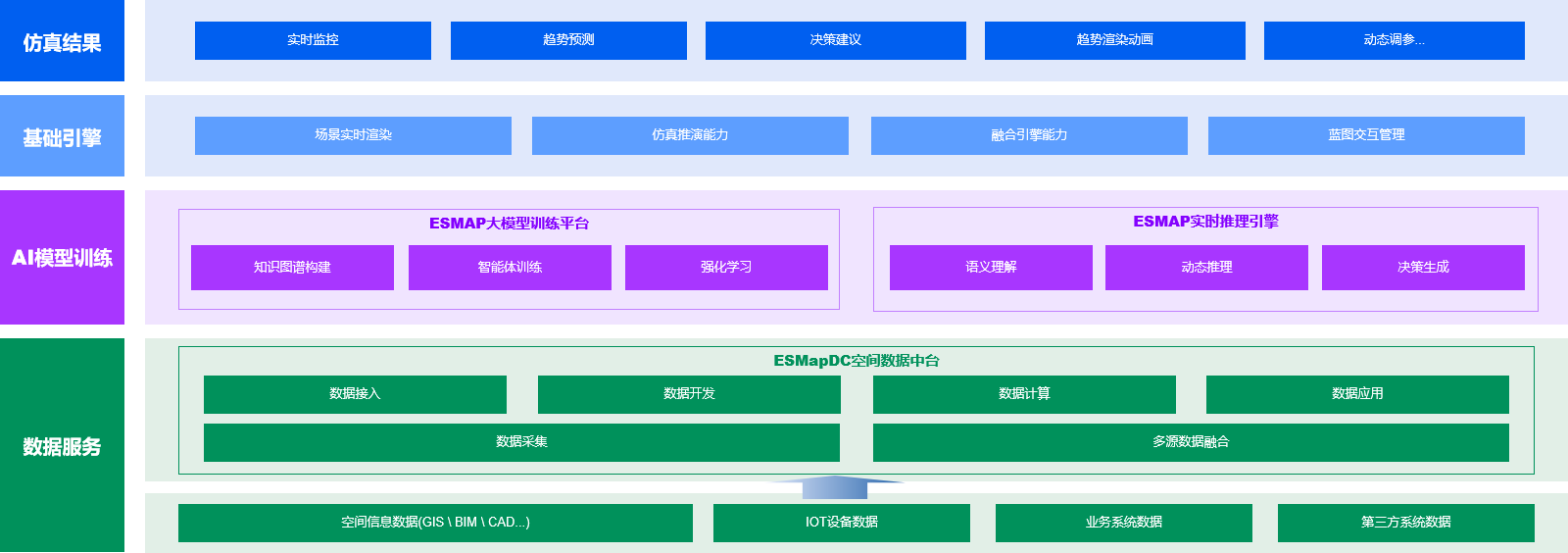
数据服务及处理层
本层作为整个技术架构的基础支撑,通过多源异构数据接入能力,实现了对 IoT 传感器、设备日志、视频监控等各类数据源的统一采集。采用 Apache Kafka + Flink 的实时流处理架构,能够高效处理 10 万 + 传感器的并发数据,同时通过自定义的 MCP 模型上下文协议实现数据标准化。边缘计算技术的应用在本地完成数据预处理,显著降低了云端传输压力,将响应延迟控制在 100ms 以内,为上层 AI 模型提供了高质量、低延迟的数据输入。
AI 模型训练与推理层
作为整个系统的 "智慧大脑",平台集成了知识图谱构建、智能体训练和强化学习三大核心能力。基于 Transformer 架构的知识图谱技术能够自动识别和分类 200 + 城市要素,构建起丰富的语义知识体系。采用 PPO 算法的智能体训练平台支持 1000 个智能体副本的并行训练,大幅提升了训练效率。混合建模技术创新性地将物理模型与数据驱动模型相结合,实现了对复杂系统的精准建模和动态推理,为实时决策提供了强大的 AI 支撑。
孪生引擎及可视化层
作为系统与用户交互的关键界面,系统基于 ESMAP 自主研发的可视化引擎,实现了高质量的三维渲染、动画仿真和交互控制功能。采用 WebGL 2.0 技术保障了 60fps 的流畅渲染效果,支持骨骼动画、粒子系统、流体模拟等复杂动画效果。丰富的交互控制方式使用户能够通过缩放、旋转、点击等操作实现对数字孪生体的全方位查看和管理,同时通过实时监控、趋势预测和决策建议的展示,为用户提供了直观、高效的决策支持界面。
关键技术突破:五大核心算法
仿真1
1. 3D 高斯重建算法(3DGS)
|
# 核心算法流程 def 3DGS_reconstruction(point_cloud, camera_params): # 步骤1:点云预处理与特征提取 features = extract_features(point_cloud)
# 步骤2:高斯混合模型拟合 gmm = GaussianMixtureModel(n_components=10000) gmm.fit(features)
# 步骤3:三维场景重建 mesh = reconstruct_mesh(gmm, camera_params)
# 步骤4:纹理映射与优化 textured_mesh = texture_mapping(mesh, camera_images)
return textured_mesh |
3D 高斯重建算法是 ESMAP 在三维建模领域的重大技术突破,通过点云预处理、高斯混合模型拟合、三维场景重建和纹理映射四个关键步骤,实现了从点云数据到高质量三维模型的自动转换。该算法将传统需要数周时间的大场景构建周期压缩至数小时,效率提升超过 60%,同时保证了厘米级的建筑边缘精度和 80% 的曲面拟合误差降低。渐进式网格技术的应用使数据量压缩至传统方法的 10%-20%,为大规模三维场景的实时渲染和交互提供了技术保障。
2. 智能体强化学习算法
|
# 多智能体协同训练 def multi_agent_training(env, agents, max_episodes=10000): for episode in range(max_episodes): # 初始化环境 state = env.reset()
# 多智能体并行交互 for agent in agents: action = agent.select_action(state) next_state, reward, done, info = env.step(action)
# 存储经验 agent.store_experience(state, action, reward, next_state, done)
# 经验回放学习 if len(agent.memory) > BATCH_SIZE: agent.learn()
# 更新全局状态 state = next_state
# 定期评估与保存 if episode % 100 == 0: evaluate_agents(agents, env) save_checkpoint(agents, episode) |
智能体强化学习算法是 ESMAP 实现自主决策的核心技术,通过多智能体并行交互和经验回放学习机制,实现了智能体在复杂环境中的高效训练。该算法支持 1000 个智能体副本的同时训练,使训练效率提升了 1000 倍,将传统需要数月的训练周期缩短至几小时。PPO 算法的应用显著提升了训练稳定性,使训练稳定性提升 40%。通过大量的仿真训练和优化,智能体的虚实迁移成功率从 60% 提升至 85%,为实现 "仿真即现实" 的目标奠定了坚实基础。
3. 异常检测与预测算法
|
# 基于LSTM的时序异常检测 def anomaly_detection(time_series_data, threshold=0.95): # 步骤1:数据标准化 scaler = StandardScaler() scaled_data = scaler.fit_transform(time_series_data)
# 步骤2:LSTM模型训练 model = LSTMModel(input_dim=10, hidden_dim=64, output_dim=1) model.train(scaled_data, epochs=100, batch_size=32)
# 步骤3:异常分数计算 predictions = model.predict(scaled_data) reconstruction_error = np.mean(np.abs(scaled_data - predictions), axis=1)
# 步骤4:异常阈值确定 anomaly_threshold = np.percentile(reconstruction_error, threshold * 100) anomalies = reconstruction_error > anomaly_threshold
return anomalies, anomaly_threshold |
异常检测与预测算法是 ESMAP 实现预测性维护的关键技术,基于 LSTM 深度学习模型,通过数据标准化、模型训练、异常分数计算和阈值确定四个步骤,实现了对时序数据的精准异常检测。该算法的异常检测准确率达到 92%,误报率控制在 5% 以下,能够提前 7 天精准预警设备故障风险。实时流数据处理能力使检测延迟控制在 1 秒以内,为及时采取维护措施提供了宝贵时间窗口。该算法在桥梁健康监测、设备故障预警等场景中表现出色,显著提升了系统的可靠性和安全性。
4. 多模态数据融合算法
|
# 多模态特征融合 def multimodal_fusion(image_features, sensor_data, text_descriptions): # 步骤1:特征提取 img_feat = extract_image_features(image_features) sen_feat = extract_sensor_features(sensor_data) txt_feat = extract_text_features(text_descriptions)
# 步骤2:特征对齐 aligned_feats = feature_alignment([img_feat, sen_feat, txt_feat])
# 步骤3:注意力融合 fused_feat = attention_fusion(aligned_feats)
# 步骤4:特征降维 reduced_feat = dimensionality_reduction(fused_feat)
return reduced_feat |
多模态数据融合算法是 ESMAP 实现跨模态信息整合的核心技术,通过特征提取、特征对齐、注意力融合和特征降维四个步骤,实现了对图像、传感器、文本等多源数据的有效融合。该算法在多模态融合后使预测精度提升 5%,支持 1000 + 特征维度的实时融合,即使在部分模态缺失的情况下仍能保持 85% 以上的精度。注意力机制的应用使系统能够自动学习不同模态数据的重要性权重,显著提升了融合效果和鲁棒性。该算法为实现更全面、更准确的决策支持提供了技术保障。
5. 数字孪生实时同步算法
|
# 虚实同步控制 def digital_twin_sync(physical_sensors, digital_model, sync_frequency=10): while True: # 步骤1:物理数据采集 sensor_data = collect_sensor_data(physical_sensors)
# 步骤2:数据预处理 processed_data = preprocess_data(sensor_data)
# 步骤3:模型参数更新 update_digital_model(digital_model, processed_data)
# 步骤4:可视化渲染 render_digital_twin(digital_model)
# 步骤5:控制指令下发 control_commands = generate_control_commands(digital_model) send_control_commands(physical_devices, control_commands)
# 控制同步频率 time.sleep(1 / sync_frequency) |
数字孪生实时同步算法是 ESMAP 实现虚实共生的关键技术,通过物理数据采集、数据预处理、模型参数更新、可视化渲染和控制指令下发五个步骤,实现了物理世界与数字孪生体的实时同步。该算法的虚实同步误差控制在 0.1mm 以内,时间同步精度达到 50ns,支持 10Hz 以上的实时更新频率。系统能够连续运行 7×24 小时无故障,为实现 "虚拟训练,现实应用" 的闭环创新提供了可靠的技术保障。该算法在智能制造、智慧交通、智慧城市等领域具有广泛的应用前景。
实现效果:量化成果展示
效率提升指标
|
指标 |
传统方法 |
ESMAP+AI |
提升幅度 |
|
场景构建时间 |
数周 |
数小时 |
效率提升 60%+ |
|
智能体训练速度 |
数月 |
几小时 |
效率提升 1000 倍 |
|
异常检测延迟 |
分钟级 |
秒级 |
延迟降低 90% |
|
决策响应时间 |
小时级 |
分钟级 |
响应提速 70% |
ESMAP+AI 方案在效率提升方面取得了显著成果,通过 3D 高斯重建算法将场景构建时间从数周压缩至数小时,效率提升超过 60%;智能体强化学习算法使训练速度提升 1000 倍,将数月的训练周期缩短至几小时;异常检测算法将检测延迟从分钟级降至秒级,延迟降低 90%;实时同步算法使决策响应时间从小时级缩短至分钟级,响应速度提升 70%。这些效率提升不仅显著降低了运营成本,更为实时决策和快速响应提供了有力支持。
精度提升指标
|
指标 |
传统方法 |
ESMAP+AI |
提升幅度 |
|
异常检测准确率 |
80% |
92% |
精度提升 15% |
|
故障预测提前量 |
1 天 |
7 天 |
提前量提升 600% |
|
虚实迁移成功率 |
60% |
85% |
成功率提升 42% |
|
仿真预测精度 |
90% |
95% |
精度提升 5.6% |
在精度提升方面,ESMAP+AI 方案同样表现出色。异常检测准确率从 80% 提升至 92%,精度提升 15%;故障预测提前量从 1 天延长至 7 天,提前量提升 600%,为预防性维护提供了充足时间;虚实迁移成功率从 60% 提升至 85%,成功率提升 42%,使仿真训练的策略能够更可靠地应用于现实场景;仿真预测精度从 90% 提升至 95%,精度提升 5.6%,为决策提供了更准确的依据。这些精度提升显著增强了系统的可靠性和实用性。
成本优化指标
|
指标 |
传统方法 |
ESMAP+AI |
节省幅度 |
|
人工巡检成本 |
100% 人工 |
40% 人工 |
成本降低 60% |
|
物理原型成本 |
100% 物理 |
75% 物理 |
成本降低 25% |
|
设备运维成本 |
基准值 |
基准值 ×0.6 |
成本降低 40% |
|
能源消耗成本 |
基准值 |
基准值 ×0.75 |
成本降低 25% |
ESMAP+AI 方案在成本优化方面带来了显著的经济效益。人工巡检成本降低 60%,将人工依赖从 100% 降至 40%;物理原型成本降低 25%,减少了对物理原型的依赖;设备运维成本降低 40%,通过预测性维护显著减少了非计划停机和维修成本;能源消耗成本降低 25%,通过智能优化实现了节能减排。这些成本优化不仅直接提升了企业的盈利能力,更为可持续发展提供了有力支持。
技术优势:为什么选择 ESMAP+AI 方案

技术领先性
ESMAP+AI 方案在技术领先性方面具有显著优势,核心算法全部自主研发,拥有 20 + 项软件著作权,技术先进性体现在采用国际前沿的 3DGS、Transformer、强化学习等技术,性能优势在效率、精度、成本等关键指标上均达到国际先进水平。公司持续的技术创新投入和严格的质量控制体系,确保了产品始终保持技术领先地位,为客户提供最先进的解决方案。
工程实用性
ESMAP+AI 方案具有很强的工程实用性,经过 300 + 项目验证,系统稳定性达 99.9%,提供完整的 API 接口和 SDK,支持快速集成,建立了完善的技术迭代和优化机制。方案充分考虑了实际工程应用中的各种复杂情况,提供了灵活的配置选项和强大的容错能力,能够适应不同行业、不同规模的应用需求,为客户提供可靠、高效的技术支持。
生态开放性
ESMAP+AI 方案具有良好的生态开放性,支持 OpenUSD、BIM、GIS 等行业标准,提供开放的开发者平台和生态合作机制,拥有活跃的开发者社区和技术支持团队。公司积极推动行业标准的制定和推广,与上下游企业建立了广泛的合作关系,共同推动数字孪生和 AI 技术的发展和应用,为客户提供更加丰富、更加完善的解决方案。
应用案例:五大典型场景
1. 智慧桥梁健康监测

ESMAP+AI 方案在智慧桥梁健康监测领域的应用取得了显著成效,通过部署 127 类传感器实时采集结构应力、位移、振动等参数,采用 LSTM + 注意力机制实现桥梁损伤演变预判,结合有限元分析预测桥梁未来服役时长。应用效果表现为桥梁服役评估准确率达 92%,运维成本降低 40%,应急响应时间缩短 70%,为桥梁的安全运营和科学维护提供了有力支持。
2. 智能制造生产线优化

在智能制造生产线优化方面,ESMAP+AI 方案构建了生产线数字孪生模型,模拟工艺流程,采用强化学习优化物流路径和设备调度,实现产线参数的自动调优。应用效果显著,生产效率提升 35%,设备利用率提高 28%,不良品率降低 40%,为制造企业的智能化转型提供了重要支撑。
3. 智能交通流预测与控制

ESMAP+AI 方案在智能交通领域的应用融合了 500 余路监控视频和 IoT 传感数据,采用图神经网络预测交通流趋势,实现信号灯配时的动态优化。应用效果表现为通行效率提升 18%,拥堵预警准确率达 85%,事故定位时间缩短至秒级,为缓解城市交通拥堵、提升交通管理水平提供了有效手段。
4. 城市洪涝灾害模拟

在城市洪涝灾害模拟方面,ESMAP+AI 方案构建了亚米级精度的城市地形模型,采用流体动力学仿真算法模拟洪水演进,结合气象数据预测灾害影响范围。应用效果显著,灾害预测精度提升 30%,应急响应时间缩短至 15 分钟,疏散效率提升 70%,为城市防洪减灾、保障人民生命财产安全提供了重要技术保障。
5. 智能体协同调度系统

ESMAP+AI 方案在智能体协同调度领域的应用部署了 120 个码头智能体,实现动态协商,采用博弈论算法优化靠泊顺序,实现多智能体的协同决策。应用效果表现为等泊时间从 38 小时缩短至 19 小时,港口碳排放下降 12%,运营效率提升 50%,为提升港口运营效率、降低能源消耗提供了创新解决方案。
技术展望:下一代仿真生态技术的挑战与解决方案
ESMAP 对 2026 年的技术发展制定了清晰的路线图,包括开发自进化仿真体,使其具备持续学习能力以适应物理世界变化;实现跨域协同仿真,打破行业壁垒,实现城市、交通、能源等多领域仿真体的互联互通;这些技术发展方向将进一步推动仿真技术的创新和应用。
面对大规模仿真的算力需求挑战,ESMAP 采用边缘 - 云协同架构,优化计算资源分配;针对多模态数据的融合难题,开发了统一的特征表示和融合算法;为解决仿真模型的可解释性问题,引入了因果推理和可解释 AI 技术。通过这些针对性的解决方案,ESMAP 不断克服技术挑战,推动仿真技术向更高水平发展。
技术创新永无止境
让每一次仿真都更接近真实
让每一个决策都更加智能

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 1
1 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)