Sensing-Aided Distortion Estimation for OFDM Radar With Nonlinear Transmitter
—本文提出了一种利用检测到的目标参数来估计正交频分复用 (OFDM) 雷达信号非线性失真的方法。由于 OFDM 雷达需要高发射功率以获得长探测距离,因此发射机 (TX) 最好工作在非线性区域以实现高功率效率。这会导致具有高峰均功率比 (PAPR) 的 OFDM 雷达信号产生强烈失真。传统上,这种失真可以通过在接收机 (RX) 处利用均衡技术或在发射机 (TX) 处利用数字预失真 (DPD) 技术来
摘要——本文提出了一种利用检测到的目标参数来估计正交频分复用 (OFDM) 雷达信号非线性失真的方法。由于 OFDM 雷达需要高发射功率以获得长探测距离,因此发射机 (TX) 最好工作在非线性区域以实现高功率效率。这会导致具有高峰均功率比 (PAPR) 的 OFDM 雷达信号产生强烈失真。传统上,这种失真可以通过在接收机 (RX) 处利用均衡技术或在发射机 (TX) 处利用数字预失真 (DPD) 技术来补偿。然而,这两种方法都需要通过额外的反馈路径获取发射信号的信息,这增加了雷达系统的硬件复杂度。为了解决这个问题,本文提出了一种感知辅助失真估计 (SADE) 方法来估计失真的 OFDM 信号。首先,利用先验已知的未失真符号对接收信号进行雷达处理。这允许在距离-多普勒 (RD) 域中检测一些初始目标。一旦检测到目标参数,就可以通过将接收信号除以计算出的目标信号来估计失真符号。该方法利用初始目标感知作为发射机 (TX) 和接收机 (RX) 之间的反馈回路。这样无需任何额外硬件即可估计失真的 OFDM 符号。针对后续目标的雷达处理使用估计出的失真符号来解调接收信号。
索引词——车载雷达,均衡,非线性失真,正交频分复用 (OFDM) 雷达,峰均功率比 (PAPR),功率放大器 (PA)。
文章目录
然而,OFDM 信号表现出极高的峰均功率比 (PAPR) [22], [23], [24], [25]。这一特性给 OFDM 雷达的线性运行带来了挑战,特别是在功率放大器 (PA) 的背景下 [26]。为了防止 PA 中的信号压缩,信号的峰值功率必须保持在 PA 的输入 1-dB 压缩点(1-dB compression point)以下。这就需要将输入回退 (input back-off ,IBO) 值设定在高于 PAPR 的水平。然而,较高的 IBO 值是以降低 PA 效率为代价的 [27]。此外,由于信号的平均功率随着 IBO 值的增加而降低,动态范围也会相应减小。当信号的峰值功率接近 PA 的输入 1-dB 压缩点时,信号中可能会出现非线性失真。这种非线性失真会导致 OFDM 信号的误差矢量幅度 (error vector magnitudes,EVM) 恶化。因此,它增加了雷达处理过程中的旁瓣电平,从而限制了雷达的动态范围 [28], [29]。
理想情况(线性): 对于一个理想的放大器,无论你输入多大的功率,输出功率都应该按照固定的增益(Gain)线性增加。 P o u t ( dBm ) = P i n ( dBm ) + Gain ( dB ) P_{out} (\text{dBm}) = P_{in} (\text{dBm}) + \text{Gain} (\text{dB}) Pout(dBm)=Pin(dBm)+Gain(dB)
现实情况(饱和): 任何物理器件都有功率上限。随着输入功率 P i n P_{in} Pin 不断增加,放大器逐渐无法提供足够的能量,增益开始下降(Gain Compression)。输出功率的增长速度变慢,最终趋于平缓(饱和)。当放大器的实际增益比其理想的小信号线性增益下降了 1 dB 时,此时的输出功率点就是输出 1-dB 压缩点。
为了克服这个问题,已经提出了几种方法 [24], [25], [28], [29], [30], [31], [32]。
- 第一种是抑制 OFDM 信号的 PAPR [24], [25]。随着 PAPR 的降低,平均功率可以接近发射机 (TX) 的 P1 dB,从而提高了雷达发射机的功率效率。然而,雷达系统的效率无法最大化,因为在设计低 PAPR OFDM 波形时,很难实现完美的零 PAPR,且系统还会受到其他硬件损伤的影响。
- 第二种方法是应用数字预失真 (digital predistortion,DPD) 来消除非线性失真 [28], [30], [31]。
- 具体而言,DPD 系数是利用 PA 的输入和输出信号估计得到的。然后将该建模应用于预失真器,对 PA 输入信号进行逆失真处理(inverse distortion),从而有效地抵消 PA 引入的失真。这种方法使 TX 在非线性区域工作,使其能够有效工作并提高 PA 的效率。
- DPD 在 OFDM 雷达系统中的应用已在 [28] 中介绍。这涉及利用雷达 TX 和接收机 (RX) 之间的串扰(crosstalk)来估计 DPD 系数,从而降低雷达中出现的旁瓣电平。
- 通常,为了估计 DPD 系数以实现 DPD,需要额外的硬件组件,例如耦合器和辅助 RX 链路(couplers and auxiliary RX chains) [30], [31]。
- 在 [28] 中,利用了 RX 和 TX 之间的串扰,而无需辅助 RX 链路。然而,当存在其他目标或串扰功率不够高时,DPD 系数估计会变得非常不准确。
- 第三种方法侧重于通过均衡来增强雷达的动态范围 [29]。
- 该方法在假设雷达 RX 具有 TX 非线性失真的先验知识的情况下运行,随后在 RX 处通过除以失真符号来均衡失真。该方法的实际实现涉及在 TX 测试板(on a TX test board)上进行直接测量,该测试板被配置为预先确定雷达的非线性失真。
- 此外,这需要加入额外的硬件组件,如衰减器和混频器(an attenuator and a mixer)。外部组件的使用再次需要额外的后处理阶段来消除其硬件缺陷。在实践中,要在不增加额外硬件复杂度的情况下获得 TX 非线性失真的先验知识是具有挑战性的,并且很难建立和配置这样的测量装置。
- 最后,文献 [32] 提出了一种利用 TX–RX 串扰路径训练神经网络 (NN) 行为模型来补偿硬件缺陷的技术。尽管如此,[32] 中的实验装置采用了 TX 和 RX 之间的直接路径来建立 TX–RX 串扰。此外,训练 NN 模型需要迭代过程来估计模型的系数,这需要相当大的计算量。
尽管已经研究了几种方法来补偿 OFDM 雷达系统的非线性失真,但在 TX–RX 之间隔离度高导致串扰不够强,或者存在其他强目标的情况下,仅依赖串扰的失真估计存在局限性 [28], [32],并且测量非线性的方法在实践中难以实现 [29]。
在本文中,我们提出了一种利用雷达场景中的目标来估计 OFDM 雷达信号失真的方法。所提出的方法
- 首先从接收信号中检测目标。
- 随后从接收信号中移除检测到的目标,以估计失真符号。
- 使用先前估计的符号对合成的接收信号进行解调,以补偿失真。
这项工作的核心思想是,在不增加任何额外硬件的情况下,引入了对 OFDM 雷达非线性 TX 引起的失真的估计。与以往使用辅助硬件和 TX 到 RX 直接串扰的方法不同,所提出的方法将目标感知作为 TX 和 RX 之间的反馈回路。这使得 OFDM 雷达即使在运行期间也能自行校准非线性失真。
II. PROBLEM OF NONLINEAR DISTORTION IN OFDM RADARS
A. OFDM Radar Signal Model With Nonlinear Distortion
在本文中,考虑的是单基地单输入单输出 (SISO) 雷达系统。假设一个 OFDM 符号由 N c N_c Nc 个子载波组成,且每个 OFDM 雷达帧由 N s N_s Ns 个 OFDM 符号组成。此外,每个雷达帧发射相同的 OFDM 数据符号 C \mathbf{C} C,这可以表示为:
C = [ c 11 c 21 ⋯ c N s 1 c 12 c 22 ⋯ c N s 2 ⋮ ⋮ ⋱ ⋮ c 1 N c c 2 N c ⋯ c N s N c ] ∈ C N c × N s . (1) \mathbf{C} = \begin{bmatrix} c_{11} & c_{21} & \cdots & c_{N_s1} \\ c_{12} & c_{22} & \cdots & c_{N_s2} \\ \vdots & \vdots & \ddots & \vdots \\ c_{1N_c} & c_{2N_c} & \cdots & c_{N_sN_c} \end{bmatrix} \in \mathbb{C}^{N_c \times N_s}. \tag{1} C=
c11c12⋮c1Ncc21c22⋮c2Nc⋯⋯⋱⋯cNs1cNs2⋮cNsNc
∈CNc×Ns.(1)
由 C \mathbf{C} C 表示的 OFDM 数据符号通过逆傅里叶变换转换为时域信号。此外,循环前缀 (CP),即时域信号的部分循环重复,被添加到每个 OFDM 符号中然后进行传输。在理想情况下,传输的数据符号精确地等于 C \mathbf{C} C。然而,当 OFDM 雷达的 TX 在非线性区域工作时,对 C \mathbf{C} C 的失真会在传输信号中显现出来。在这种情况下,令 Δ C \Delta \mathbf{C} ΔC 表示影响符号的失真,其表示为
Δ C = [ Δ c 11 Δ c 21 ⋯ Δ c N s 1 Δ c 12 Δ c 22 ⋯ Δ c N s 2 ⋮ ⋮ ⋱ ⋮ Δ c 1 N c Δ c 2 N c ⋯ Δ c N s N c ] ∈ C N c × N s . (2) \Delta \mathbf{C} = \begin{bmatrix} \Delta c_{11} & \Delta c_{21} & \cdots & \Delta c_{N_s1} \\ \Delta c_{12} & \Delta c_{22} & \cdots & \Delta c_{N_s2} \\ \vdots & \vdots & \ddots & \vdots \\ \Delta c_{1N_c} & \Delta c_{2N_c} & \cdots & \Delta c_{N_sN_c} \end{bmatrix} \in \mathbb{C}^{N_c \times N_s}. \tag{2} ΔC=
Δc11Δc12⋮Δc1NcΔc21Δc22⋮Δc2Nc⋯⋯⋱⋯ΔcNs1ΔcNs2⋮ΔcNsNc
∈CNc×Ns.(2)
因此,在 TX 非线性失真下的 OFDM 符号可以表示为 C + Δ C \mathbf{C} + \Delta \mathbf{C} C+ΔC。
传输的 OFDM 信号在从目标反射后,包含关于目标的时间延迟和多普勒效应的信息。假设 r ( τ ) \mathbf{r}(\tau) r(τ) 表示距离导向矢量, v ( f D ) \mathbf{v}(f_D) v(fD) 表示多普勒导向矢量,它们可以分别写作:
r ( τ ) = [ 1 e − j 2 π Δ f τ e − j 2 π 2 Δ f τ ⋯ e − j 2 π ( N c − 1 ) Δ f τ ] T ∈ C N c × 1 (3) \mathbf{r}(\tau) = [1 \quad e^{-j2\pi \Delta f \tau} \quad e^{-j2\pi 2\Delta f \tau} \quad \cdots \quad e^{-j2\pi (N_c-1)\Delta f \tau}]^{\text{T}} \in \mathbb{C}^{N_c \times 1} \tag{3} r(τ)=[1e−j2πΔfτe−j2π2Δfτ⋯e−j2π(Nc−1)Δfτ]T∈CNc×1(3) v ( f D ) = [ 1 e j 2 π f D T s e j 2 π 2 f D T s ⋯ e j 2 π ( N s − 1 ) f D T s ] T ∈ C N s × 1 (4) \mathbf{v}(f_D) = [1 \quad e^{j2\pi f_D T_s} \quad e^{j2\pi 2f_D T_s} \quad \cdots \quad e^{j2\pi (N_s-1)f_D T_s}]^{\text{T}} \in \mathbb{C}^{N_s \times 1} \tag{4} v(fD)=[1ej2πfDTsej2π2fDTs⋯ej2π(Ns−1)fDTs]T∈CNs×1(4)
其中 τ \tau τ 表示到目标的往返时间,而 f D f_D fD 表示由雷达与目标之间的相对速度产生的多普勒频偏。 Δ f \Delta f Δf 代表子载波间隔, T s T_s Ts 对应于每个 OFDM 符号的持续时间,包括 CP。为了确保子载波之间的正交性, Δ f \Delta f Δf 和 T s T_s Ts 之间存在关系,即 Δ f = 1 / ( T s − T cp ) \Delta f = 1/(T_s - T_{\text{cp}}) Δf=1/(Ts−Tcp)。这里, T cp T_{\text{cp}} Tcp 表示 CP 的持续时间。
鉴于在第 u u u 个雷达帧观测到 K K K 个目标,每个目标信息矩阵可以表示为
R = [ r ( τ 1 ) r ( τ 2 ) ⋯ r ( τ K ) ] ∈ C N c × K (5) \mathbf{R} = [\mathbf{r}(\tau_1) \quad \mathbf{r}(\tau_2) \quad \cdots \quad \mathbf{r}(\tau_K)] \in \mathbb{C}^{N_c \times K} \tag{5} R=[r(τ1)r(τ2)⋯r(τK)]∈CNc×K(5) V = [ v ( f D , 1 ) v ( f D , 2 ) ⋯ v ( f D , K ) ] ∈ C N s × K (6) \mathbf{V} = [\mathbf{v}(f_{D,1}) \quad \mathbf{v}(f_{D,2}) \quad \cdots \quad \mathbf{v}(f_{D,K})] \in \mathbb{C}^{N_s \times K} \tag{6} V=[v(fD,1)v(fD,2)⋯v(fD,K)]∈CNs×K(6) A = diag ( α 1 , α 2 , … , α K ) ∈ C K × K (7) \mathbf{A} = \text{diag}(\alpha_1, \alpha_2, \ldots, \alpha_K) \in \mathbb{C}^{K \times K} \tag{7} A=diag(α1,α2,…,αK)∈CK×K(7)
其中 R \mathbf{R} R 和 V \mathbf{V} V 分别代表距离矩阵和多普勒矩阵。 A \mathbf{A} A 包含每个目标 α k \alpha_k αk 的复振幅,包括目标雷达截面积 (RCS)。
利用 (5)–(7),接收信号的频域表示可以公式化为
S ( u ) = ( C + Δ C ) ⊙ X ( u ) + W ( u ) (8) \mathbf{S}^{(u)} = (\mathbf{C} + \Delta \mathbf{C}) \odot \mathbf{X}^{(u)} + \mathbf{W}^{(u)} \tag{8} S(u)=(C+ΔC)⊙X(u)+W(u)(8)
其中 X ( u ) = R A V T \mathbf{X}^{(u)} = \mathbf{R}\mathbf{A}\mathbf{V}^{\text{T}} X(u)=RAVT, W ( u ) \mathbf{W}^{(u)} W(u) 是在第 u u u 个雷达帧接收到的复高斯白噪声,具有独立同分布 (i.i.d.) C N ( 0 , σ 2 ) \mathcal{CN}(0, \sigma^2) CN(0,σ2) 条目。 S ( u ) \mathbf{S}^{(u)} S(u) 表示在第 u u u 个雷达帧接收到的信号。在这个建模中,目标仅在雷达帧之间移动,而忽略每个雷达帧内的移动。
为了提取关于目标的距离和相对速度的信息,接收信号与已知调制符号 C \mathbf{C} C 的逐元素除法执行如下:
Z = S ( u ) ⊘ C = X ( u ) + ( Δ C ⊘ C ) ⊙ X ( u ) + W ( u ) ⊘ C . (9) \begin{aligned} \mathbf{Z} &= \mathbf{S}^{(u)} \oslash \mathbf{C} \\&= \mathbf{X}^{(u)} + (\Delta \mathbf{C} \oslash \mathbf{C}) \odot \mathbf{X}^{(u)} + \mathbf{W}^{(u)} \oslash \mathbf{C}. \end{aligned}\tag{9} Z=S(u)⊘C=X(u)+(ΔC⊘C)⊙X(u)+W(u)⊘C.(9)
距离-多普勒 (RD) 图可以通过沿频率轴的逆离散傅里叶变换和沿时间轴的离散傅里叶变换计算得到 [15]。在 RD 图中, X ( u ) \mathbf{X}^{(u)} X(u) 产生目标峰值,而 W ( u ) ⊘ C \mathbf{W}^{(u)} \oslash \mathbf{C} W(u)⊘C 贡献噪声电平。这与没有非线性失真的 OFDM 雷达的处理结果一致。然而,项 ( Δ C ⊘ C ) ⊙ X ( u ) (\Delta \mathbf{C} \oslash \mathbf{C}) \odot \mathbf{X}^{(u)} (ΔC⊘C)⊙X(u) 是作为雷达中非线性失真的结果而引入的。令 Y \mathbf{Y} Y 表示定义为失真引起的噪声(distortion-induced noise )
Y = Δ C ⊘ C . (11) \mathbf{Y} = \Delta \mathbf{C} \oslash \mathbf{C}. \tag{11} Y=ΔC⊘C.(11)
由于 Y ⊙ X ( u ) \mathbf{Y} \odot \mathbf{X}^{(u)} Y⊙X(u),RD 图中的旁瓣电平增加了。在 II-B 节中,我们将正式分析非线性失真如何影响目标检测。
B. Effect of Nonlinear Distortion
接收信号由 (8) 表示。最初,对接收信号应用距离和多普勒处理。假设矩阵 C \mathbf{C} C 的元素具有恒定幅度,RD 图的检测信噪比 (SNR) 的通用形式可以推导为
SNR = 10 log 10 ( tr ( X X H ) tr ( ( X ⊙ Y ) ( X ⊙ Y ) H ) + σ 2 ) + 10 log 10 N c N s . (12) \text{SNR} = 10\log_{10} \left( \frac{\text{tr}(\mathbf{X}\mathbf{X}^{\text{H}})}{\text{tr}((\mathbf{X} \odot \mathbf{Y})(\mathbf{X} \odot \mathbf{Y})^{\text{H}}) + \sigma^2} \right) + 10\log_{10} N_c N_s. \tag{12} SNR=10log10(tr((X⊙Y)(X⊙Y)H)+σ2tr(XXH))+10log10NcNs.(12)
(12) 中的信号功率通过 RD 处理获得了 10 log 10 N c N s 10\log_{10} N_c N_s 10log10NcNs 的处理增益。非线性失真噪声可以近似为方差为 σ Y 2 \sigma_Y^2 σY2 的高斯白噪声,因为离散傅里叶变换模块充当了从一组复随机变量到一组复高斯随机变量的变换,即使输入变量是相关的 [33]。这意味着 Y \mathbf{Y} Y 的条目具有等于 σ Y 2 \sigma_Y^2 σY2 的功率。鉴于 X \mathbf{X} X 和 Y \mathbf{Y} Y 彼此独立,(12) 中的 SNR 可以计算为
SNR = 10 log 10 ( N c N s ∑ k = 1 K ∣ α k ∣ 2 σ Y 2 ∑ k = 1 K ∣ α k ∣ 2 + σ 2 ) . (13) \text{SNR} = 10\log_{10} \left( \frac{N_c N_s \sum_{k=1}^{K} |\alpha_k|^2}{\sigma_Y^2 \sum_{k=1}^{K} |\alpha_k|^2 + \sigma^2} \right). \tag{13} SNR=10log10(σY2∑k=1K∣αk∣2+σ2NcNs∑k=1K∣αk∣2).(13)
(13) 中的失真引起的噪声可以通过参考图 1 来验证,图 1 展示了基于 IBO 的 σ Y 2 \sigma_Y^2 σY2 值。该值是使用 1000 次运行的蒙特卡洛模拟近似得出的。图 1 描绘了使用重复符号时发生的失真引起的噪声。模拟中使用的信号由 512 个子载波组成,平均 PAPR 为 9.3 dB。参考图 1 和 (13),可以观察到目标的 SNR 由于失真而降低。因此,在存在失真的情况下,很明显与没有失真的 OFDM 雷达相比,检测性能严重下降。
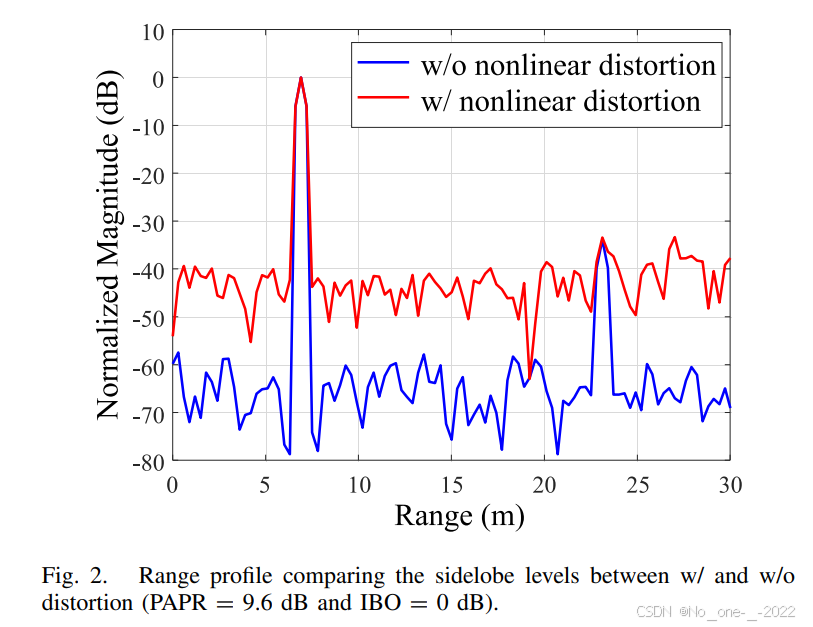
图 2 展示了在相同平均功率下运行的 OFDM 信号在有和没有非线性失真情况下的距离剖面。在图中,两个目标位于 7 米和 23 米处。在没有非线性失真的情况下,距离剖面表现出较低的旁瓣电平,便于直接的目标识别。相反,在存在非线性失真的情况下,旁瓣电平沿距离轴增加,导致雷达动态范围减小。因此,这对识别具有小 RCS 的目标或位于远距离的目标构成了挑战。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 15
15 0
0- 0



 已为社区贡献25条内容
已为社区贡献25条内容

所有评论(0)